无人机的制作方法
1.本实用新型涉及飞行器技术领域,特别涉及一种无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。传统的无人机中包括中心体,其中机身内部设置有飞行控制系统及用于为无人机提供动力的电源装置。
3.然而,由于飞行控制系统及电源装置均为无人机重量较大的部件,集中设置在中心体位置,导致中心体重量较大。同时由于电源装置中央整体布置,无冗余度,如果电源装置出现故障或失效,整机就将失去动力,不能继续飞行,产生安全隐患。
4.因此,如何提高无人机的使用安全性,是本领域技术人员亟待解决的技术问题。
技术实现要素:
5.本实用新型的目的是提供一种无人机,该无人机的使用安全性提高。
6.为实现上述目的,本实用新型提供一种无人机,包括电源装置、中心体、螺旋桨驱动装置及安装在所述中心体上的至少两个机臂,所述电源装置包括多个电池模组,各所述机臂上设置至少一个所述电池模组;
7.在各所述机臂上分别安装所述螺旋桨驱动装置,位于同一个所述机臂上的所述电池模组和所述螺旋桨驱动装置电连接。
8.优选地,所述无人机还包括设置在各所述机臂上,且与所述螺旋桨驱动装置连接的螺旋桨,所述电池模组相互独立设置,且所述电池模组的输出端与所述螺旋桨驱动装置一对一电连接。
9.优选地,所有所述机臂以所述中心体为中心呈辐射状分布。
10.优选地,所有所述机臂以所述中心体为中心圆周方向均匀分布。
11.优选地,所述电池模组包括电池组件、电池信息采集模块、电路保护装置和电子调速器,所述电池信息采集模块、所述电路保护装置、所述螺旋桨驱动装置和所述电子调速器均与所述电池组件电连接。
12.优选地,同一个机臂上的所述电子调速器、所述电路保护装置和所述电池组件由所述中心体向所述机臂自由端延伸方向依次设置。
13.优选地,所述电池组件呈多层设置,所述电池组件叠置于所述机臂内部。
14.优选地,所述电池信息采集模块夹设在相邻两层所述电池组件之间。
15.优选地,所述机臂包括设有槽型腔的外壳主体及用于封堵所述槽型腔的封板,所述封板与所述外壳主体可拆卸连接,所述电池模组位于所述槽型腔内。
16.优选地,还包括设置在所述中心体内的电池管理装置,所有所述电池模组均与所述电池管理装置电连接。
17.在上述技术方案中,本实用新型提供的无人机包括电源装置、中心体、螺旋桨驱动
装置及安装在中心体上的至少两个机臂,电源装置包括多个电池模组,各机臂上设置至少一个电池模组。在各机臂上分别安装螺旋桨驱动装置,位于同一个机臂上的电池模组和螺旋桨驱动装置电连接。
18.通过上述描述可知,在本技术提供的无人机中,通过将与螺旋桨驱动装置连接的电池模组安装在机臂上,在某一个电池模组失效时,与其余电池模组连接的螺旋桨驱动装置仍可以正常工作,避免整机失去动力,进而提高了无人机的使用安全性。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
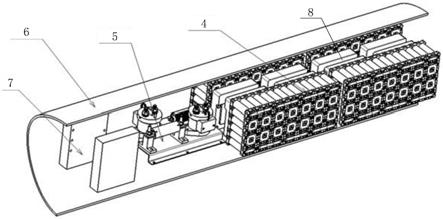
20.图1为本实用新型实施例所提供的无人机的结构示意图;
21.图2为本实用新型实施例所提供的电源装置的安装位置图。
22.其中图1
‑
2中:1
‑
螺旋桨驱动装置、2
‑
中心体、3
‑
机臂、4
‑
电池组件、5
‑
电路保护装置、6
‑
外壳主体、7
‑
电子调速器、8
‑
电池信息采集模块。
具体实施方式
23.本实用新型的核心是提供一种无人机,该无人机的使用安全性提高。
24.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和实施方式对本实用新型作进一步的详细说明。
25.请参考图1和图2。
26.在一种具体实施方式中,本实用新型具体实施例提供的无人机包括电源装置、中心体2及安装在中心体2上的至少两个机臂3,电源装置包括多个电池模组,各机臂3上设置至少一个电池模组,具体的,相两个电池模组可以串联,优选,电池模组相互独立设置。位于同一个机臂3上的电池模组和螺旋桨驱动装置1电连接。其中,在各机臂3上分别安装螺旋桨驱动装置1。
27.优选的,该无人机还包括设置在各机臂3上,且与螺旋桨驱动装置1连接的螺旋桨,电池模组的输出端用于与螺旋桨驱动装置1一对一电连接。具体的,机臂3可以为三个、四个、五个、六个等。每个机臂3上的螺旋桨驱动装置1与其机臂3上的电池模组连接。
28.其中,机臂3可以布置在中心体2的相对两侧,优选的,所有机臂3以中心体2为中心呈辐射状分布。
29.通过上述描述可知,在本技术具体实施例所提供的无人机中,通过将与螺旋桨驱动装置1连接的电池模组安装在机臂3上,在某一个电池模组失效时,与其余电池模组连接的螺旋桨驱动装置1仍可以正常工作,避免无人机整机失去动力,进而提高了无人机的使用安全性。
30.本技术将将电池模组分布式布置在整机上,提供了更高的安全冗余度,同时,电池模组靠近对应机臂3上螺旋桨的驱动电机,减少线缆的长度,避免了在线路上产生电损耗。
31.具体的,为了减少中心体2位置的重量,优选,所有电池模组均安装在机臂3上。
32.本技术将无人机的电池系统拆分为多个可独立使用的电池模组,每个电池模组可以分别满足一个机臂3上螺旋桨的驱动电机使用,当某一组电池失效时,其余无人机的螺旋桨仍有动力提供,整机不会坠毁。
33.具体的,每个机臂3上的电池模组可以不做拆分,单个电池模组失效时,通过无人机的飞机控制器控制其它螺旋桨的升力变化,可以基本稳定飞行姿态并进行迫降,通过电池模组分布式设置实现安全冗余。
34.为了提高无人机的飞行平衡性,优选,所有机臂3绕中心体2为中心圆周方向均匀分布,且机臂3与电池模组一一对应。当机臂为3个时,相邻两个机臂3轴线方向夹角为120
°
。当机臂3为4个时,相邻两个机臂3轴线方向夹角为90
°
。
35.在一种具体实施方式中,电池模组包括电池组件4、电池信息采集模块8、电路保护装置5和电子调速器7,电池信息采集模块8、电路保护装置5、螺旋桨驱动装置1和电子调速器7均与电池组件4电连接。其中,电子调速器7、电路保护装置5和电池组件4可以沿机臂3宽度方向排布。
36.为了减小机臂3宽度,优选,同一个机臂3上的电子调速器7、电路保护装置5和电池组件4由中心体2向机臂3自由端延伸方向依次设置,即同一个机臂3上的电子调速器7、电路保护装置5和电池组件4沿机臂3轴线长度方向排布。具体的,电子调速器7布置在机臂3即靠近中心体2的一端,其正负极与电池组件4连接,电子调速器7的三相输出朝向螺旋桨驱动装置1的电机端。
37.在一种具体实施方式中,电池组件4呈多层设置,电池组件4叠置于机臂3内部。具体的,多层电池组件3可以沿机臂3长度方向和宽度方向依次排布。
38.其中,电池信息采集模块8夹设在相邻两层电池组件4之间。便于电池信息采集模块8与各个电池组4的连接。
39.机臂3包括设有槽型腔的外壳主体6及用于封堵槽型腔的封板,具体的,封板可以位于机臂3的侧端、顶端或底端,封板与外壳主体6可拆卸连接,电池模组位于槽型腔内。本技术利用机臂3作为电池组件4、电子调速器7的保护壳,节省了空间和零部件,同时电池的保护功能由机臂3承担,减轻中心体2的总体重量。
40.具体的,机臂3可以为耐高温、高强度的塑料材质加工而成。当然,机臂3采用铝制机臂,保证高强度、高刚度。由铝材作为电池组件4的外壳和无人机的机身结构件,减少无效重量,从而增加整机有效载重量。
41.在一种具体方式中,每个机臂3的底端设有至少一个连通槽型腔的散热孔。当封板位于机臂3的底端时,散热孔可以开设在封板上。本技术可以将螺旋桨旋转引起的气流可以作为冷却系统,通过散热孔为机臂3内的发热器件散热,避免了设置单独的散热器,降低了无效重量,从而增加有效载荷。由于在螺旋桨无人机的飞行过程中,螺旋桨向下吹风,气流通过散热孔流通到机臂3的空腔内,可为电池模组和电调(电子调速器7)提供强制风冷,增加冷却效果,防止出现热失控现象,提高工作能力。
42.其中,散热孔的数量及形状根据实际需要而定,本技术不做具体限定,具体的,机臂3的底端可以做成防尘网式结构形成散热孔,即可以器起到对机臂3内部发热器件散热,又可以减少杂质进入机臂3内部。
43.在上述各方案的基础上,该无人机还包括设置在中心体2内的电池管理装置,所有
电池模组均与电池管理装置电连接。
44.由于,本技术,电池模组排布在机臂3内部,电池管理装置布置在机身中部的中心体2内,与电池模组分开,具体通过线束连接,可以对电池模组进行检测。电池管理装置集中放置在中心体2处,可以便于多电池模组间的协同控制,同时可以降低机臂3的重量,使被试飞行器惯性矩减小,有利于操控性的提高。
45.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
46.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1