无人机角度调节结构的制作方法
1.本实用新型涉及无人机技术领域,特别涉及无人机角度调节结构。
背景技术:
2.无人机的气动舵翼的控制系统,其包括可动件(比如为气动舵翼或桨叶)及、固定设置有伺服电机的无人机体,伺服电机具有电机轴,电机轴上设置有磁体以及与磁体相抵或相近的霍尔检测模块。
3.径向磁环通过穿过径向磁环的螺栓等紧固件固定。
4.综上,现有技术至少存在以下技术问题,
5.第一,径向磁环、霍尔检测模块可能直接接触(因同心度的问题等),容磨损而导致无人机无法稳定精准的飞行。
6.第二,径向磁环的组装比较麻烦。
技术实现要素:
7.本实用新型的一个目的在于,解决或者缓解上述第一个技术问题。
8.本实用新型采取的手段为,无人机角度调节结构,包括可动件及、固定设置有伺服电机的无人机体,伺服电机具有电机轴;可动件与电机轴固定连接;还包括径向磁环及、霍尔检测模块;径向磁环直接或者间接固定在电机轴上且与电机轴大致同轴心;霍尔检测模块固定在伺服电机上且正对径向磁环。
9.本实用新型达到的效果为,径向磁环、霍尔检测模块之间存在间隙,径向磁环、霍尔检测模块之间不会产生磨损而导致的偏差,可动件的角度控制比较准确。
10.进一步的技术方案,还包括设置有连接臂的连接件,可动件为气动舵翼,连接臂与气动舵翼固定连接,连接臂的断面完全位于气动舵翼的断面内,连接件与电机轴固定连接。
11.进一步的技术方案,连接件固定在连接件上,连接件与电机轴插接并固定。
12.径向磁环与连接件组装后,连接件再与气动舵翼组装为一体,然后连接件插接在电机轴上,便于组装。
13.进一步的技术方案,电机轴为花键,连接件设置有花键孔,电机轴嵌入花键孔。
14.进一步的技术方案,连接件开设有安装槽,径向磁环嵌入安装槽。
15.以限制径向磁环的轴向位置。
16.进一步的技术方案,可动件为桨叶且固定在电机轴的一端。
17.进一步的技术方案,电机轴的另一端开设有安装槽,径向磁环嵌入安装槽。
18.进一步的技术方案,电机轴的另一端的端面开设有多个空槽;轴视时空槽的轴心线分别位于电机轴的圆形内。
19.能够确保径向磁环牢固地固定在电机轴上。
20.综上,本实用新型能够达到以下技术效果,
21.1}径向磁环、霍尔检测模块之间存在间隙,径向磁环、霍尔检测模块之间不会产生
磨损而导致的偏差,可动件的角度控制比较准确。
22.2}径向磁环与连接件组装后,连接件再与气动舵翼组装为一体,然后连接件插接在电机轴上,便于组装。
23.3}能够确保径向磁环牢固地固定在电机轴上。
附图说明
24.图1是根据本实用新型的实施例一的无人机角度调节结构的立体示意图;无人机体1的外壳未画出。
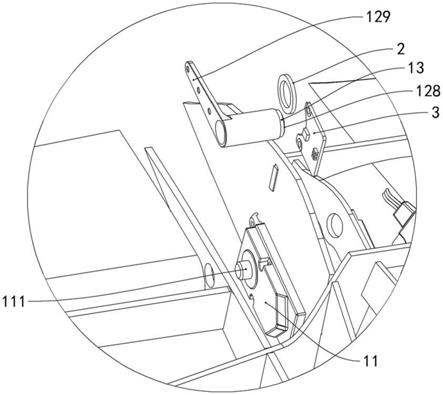
25.图2是细节一dtl1的立体分解示意图。
26.图3是细节一dtl1的立体分解示意。
27.图4是根据本实用新型的实施例一的径向磁环2的仰视示意图。
28.图5是根据本实用新型的实施例一的无人机角度调节结构的框图。
29.图6是图5中功率驱动电路部分的示意图。
30.图7是根据本实用新型的实施例一的中点调零电路原理图的原理图。
31.图8是根据本实用新型的实施例二的无人机角度调节结构的俯视示意图;箭头一arr1表示无人机飞行时无人机体1的移动方向;线条一line1表示桨叶92的对无人机飞行的阻力最大的假想位置、即大致垂直于箭头一arr1。
32.图9是根据本实用新型的实施例二的伺服电机11的示意图。
33.图10是根据本实用新型的实施例二的伺服电机11及径向磁环2的立体分解示意图。
34.箭头一arr1;细节一dtl1;线条一line1;无人机体1;伺服电机11;电机轴111;连接件12;花键孔128;连接臂129;安装槽13;空槽131;弯曲段132;径向磁环2;n极21;s极22;霍尔检测模块3;可动件9;气动舵翼91;桨叶92。
具体实施方式
35.下面将结合说明书附图,对本实用新型的具体实施方式进行说明。
36.作为具体的实施例,本实用新型的实施例一的无人机角度调节结构,其包括可动件9及、固定设置有伺服电机11的无人机体1,伺服电机11具有电机轴111。
37.可动件9与电机轴111固定连接。
38.本实用新型的实施例一的无人机角度调节结构,还包括径向磁环2及、霍尔检测模块3;径向磁环2直接或者间接固定在电机轴111上且与电机轴111大致同轴心;霍尔检测模块3固定在伺服电机11上且正对径向磁环2。
39.霍尔检测模块3为ma702芯片,能够将场强以pwm或spi协议输出,以pwm为例,霍尔检测磁环角度会输出pwm信号,飞控会将信号编译为0-4096也就是代表0-365度。
40.作为现有技术,如图5-7所示,如cn 202272170 u所公开的技术方案,无人机角度调节结构的电控结构,包括舵机放大器和电动舵机两部分,舵机放大器接收综控机的舵控信号;舵机放大器由放大校正电路,隔离放大电路、功率驱动电路、输出隔离电路、反馈放大电路以及电源模块组成;电动舵机由电机(即伺服电机11)、减速器(减速器并非必须)、输出轴(即电机轴111)、电位器组成。
41.其中,舵机放大器接收的舵控信号由放大校正电路放大校正后输入隔离放大电路;隔离放大后的信号通过功率驱动电路后,经由电动舵机的电机、减速器从而控制电动舵机输出轴的偏转角度;偏转角度信号通过电位器转换成电压信号(对应霍尔检测模块3的信号),该电压信号输入到舵机放大器的反馈放大电路中,放大后的信号分别输入到放大校正电路和输出隔离电路,输出隔离电路再将反馈信号发给综控机和遥测。输出隔离电路实现舵机放大器反馈放大电路与综控机、遥测的隔离,可选用阻容结构或射级跟随器等方式实现,为本领域技术人员的公知常识。放大校正电路的结构为本领域技术人员的公知常识。
42.径向磁环2、霍尔检测模块3之间存在间隙,径向磁环2、霍尔检测模块3之间不会产生磨损而导致的偏差,可动件9的角度控制比较准确。
43.无人机角度调节结构,还包括设置有连接臂129的连接件12,可动件9为气动舵翼91,连接臂129与气动舵翼91固定连接,连接臂129的断面完全位于气动舵翼91的断面内,连接件12与电机轴111固定连接(通过螺丝钉等)。气动舵翼91为用于控制无人机升降的气动舵翼。
44.连接件12固定在连接件12上,连接件12与电机轴111插接并固定,使得径向磁环2间接固定在电机轴111上。比如,电机轴111为花键,连接件12设置有花键孔128,电机轴111嵌入花键孔128。径向磁环2与连接件12组装后,连接件12再与气动舵翼91组装为一体,然后连接件12插接在电机轴111上,便于组装;对于气动舵翼91的体积较大的情形,该有益效果显得较为明显。
45.连接件12开设有安装槽13,径向磁环2嵌入安装槽13而实现过盈配合,使得径向磁环2间接固定在电机轴111上。连接件12为塑料等非磁性材料制成。以限制径向磁环2的轴向位置。
46.实施例二的无人机角度调节结构,可动件9为桨叶92且固定在电机轴111的一端。如图8所示,当桨叶92旋转使无人机升空后,无人机为布的桨叶(附图未画出)启动提供沿箭头一arr1的推力,无人机依靠机翼(附图未标出)提供的升力飞行,桨叶92停止旋转。伺服电机11带动桨叶92旋转直至大致平行于箭头一arr1,相比于桨叶92大致垂直于箭头一arr1,能够减少其产生的空气阻力。
47.电机轴111的另一端开设有安装槽13,径向磁环2嵌入安装槽13而实现过盈配合。
48.电机轴111的另一端的端面开设有多个空槽131;轴视时空槽131的轴心线分别位于电机轴111的圆形内。作为具体的实施方式,空槽131为三个且绕电机轴111的轴心线均匀地设置。电机轴111为不锈钢等硬质金属制成。能够使得弯曲段132发生轻微地弹性形变而抵持径向磁环2的内壁,能够确保径向磁环2牢固地固定在电机轴111上。
49.如在本实用新型中使用用语:第一、第二等,不表示任何顺序、量或重要性,仅是用于区分。
50.如在本实用新型中使用用语:一个、一种等,不表示数量的限制,而是表示至少一个提到的对象的存在。
51.如在本实用新型中使用指示方位或位置的用语:顶部、底部、侧部、纵向、横向、中间、中心、外、内、水平、竖直、左、右、上方、下方等,意指反映相对位置,而非绝对位置。
52.如在本实用新型中使用的用语:大致、整体、近似、相近等,是为了指出存在特征但允许一定偏差的限定用语。允许一定偏差的量可取决于特定背景而变化;例如,针对尺寸的
偏差、可取决于的特定背景包括但不限于尺寸公差的国家标准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1