支架式无人机的制作方法
1.本技术涉及飞行器技术领域,尤其是涉及一种支架式无人机。
背景技术:
2.无人机是
ꢀ“
无人驾驶飞机”的简称,英文缩写为“uav”。无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,其还可以额由车载计算机完全地或间歇地自主地操作。
3.无人机逐渐向轻量化的方向发展。相关技术中,无人机轻量化设计通常采用的方式为:1、使用轻质材料制作无人机壳体;2、将无人机的机架设置为支架式。
4.针对上述中的相关技术,发明人认为无人机轻量化设计后,其降落在地面时的稳定性变差,易致使无人机倾倒。
技术实现要素:
5.为了使得轻量化设计后的无人机不易倾倒,本技术提供一种支架式无人机。
6.本技术提供的一种支架式无人机采用如下的技术方案:
7.一种支架式无人机,包括机体以及设在机体靠近地面一侧的起落架,所述起落架包括支撑脚和拉撑臂,所述起落架至少设有三组,所述支撑脚的一端转动设置在机体上,且支撑脚的另一端沿相互靠近的方向延伸,所述拉撑臂设在机体和支撑脚之间且对支撑脚形成拉撑作用。
8.通过采用上述技术方案,机体保持飞行时,拉撑臂对支撑脚进行对拉,以使得拉撑臂远离机体的一端相互靠近;机体降落时,拉撑臂在地面的抵接下沿靠近机体的方向转动,拉撑臂对支撑脚形成缓冲和支撑,以减小机体的晃动,从而使得机体不易倾倒。
9.可选的,所述拉撑臂包括内杆和套管,所述内杆和套管相互靠近的一端插接配合,内杆远离套管的一端转动设置在机体上,套管远离内杆的一端转动设置在支撑脚上,所述内杆可以在套管内往复运动。
10.通过采用上述技术方案,支撑脚与地面抵接且受压时,驱使内杆在套管内滑移且使拉撑臂收缩,即可使得拉撑臂对支撑脚形成缓冲和支撑;支撑脚悬空,内杆在套管内滑移且使得拉撑臂复位,即可使得拉撑臂对支撑脚进行对拉;内杆在套管内滑移时,内杆和套管均发生转动,内杆的滑移更加顺畅。
11.可选的,所述套管设有供内杆往复运动的滑移通道,所述滑移通道内设有拉撑弹簧,所述拉撑弹簧的一端固设在内杆伸入套管的一端,拉撑弹簧的另一端固设在滑移通道的侧壁上。
12.通过采用上述技术方案,内杆滑移时对拉撑弹簧进行压缩,即可使得拉撑臂对支撑脚进行缓冲和支撑;拉撑弹簧复位,即可驱使内杆复位,并使得拉撑臂对支撑脚进行对拉,从而达到使内杆可以在套管内往复运动的目的。
13.可选的,所述支撑脚靠近地面的一端设有抵接部,所述抵接部与支撑脚之间呈钝
角设置,所述抵接部设在支撑脚靠近拉撑臂的一侧。
14.通过采用上述技术方案,机体降落时,抵接部先与地面相抵接,由于地面与抵接部之间的夹角较小,地面更容易对抵接部形成挤压,从而使得地面更容易驱使支撑脚转动。
15.可选的,所述抵接部远离支撑脚的一侧设有缓冲垫。
16.通过采用上述技术方案,抵接部与地面相抵接时,缓冲垫可以对抵接部形成缓冲作用,以进一步增强机体的防晃性。
17.可选的,所述机体包括控制主体和悬臂机翼,所述悬臂机翼设在控制主体的外沿,所述悬臂机翼与起落架一一对应,所述支撑脚设在悬臂机翼上,所述拉撑臂设在支撑脚和悬臂机翼之间。
18.通过采用上述技术方案,控制主体用作控制和功能的单元体,悬臂机翼用于使得机体保持飞行;机体降落时,支撑脚对悬臂机翼进行缓冲和支撑,即可达到对机体进行缓冲和支撑的目的。
19.可选的,所述悬臂机翼包括悬臂杆、驱动电机和螺旋桨,所述悬臂杆的两端分别与控制主体和支撑脚固定连接,所述驱动电机固定在悬臂杆远离控制主体一端,所述螺旋桨固定在驱动电机的输出端,所述控制主体用于控制驱动电机的启停。
20.通过采用上述技术方案,控制主体控制驱动电机启动后,驱动电机驱使螺旋桨转动,即可带动机体保持飞行。
21.可选的,所述悬臂杆为中空管道。
22.通过采用上述技术方案,不仅使得无人机进一步满足轻量化的要求;并且还可以将驱动电机和控制主体电连接的电缆穿设在悬臂杆内,以使得悬臂杆对电缆形成防护。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.机体保持飞行时,拉撑臂对支撑脚进行对拉,以使得拉撑臂远离机体的一端相互靠近;机体降落时,拉撑臂在地面的抵接下沿靠近机体的方向转动,拉撑臂对支撑脚形成缓冲和支撑,以减小机体的晃动,从而使得机体不易倾倒;
25.2.通过设置抵接部,使得机体降落时,地面更容易驱使支撑脚转动。
附图说明
26.图1是本技术实施例支架式无人机整体的结构示意图;
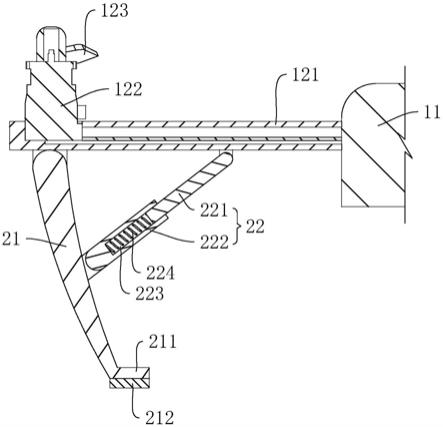
27.图2是本技术实施例支架式无人机的纵向剖视图。
28.附图标记说明:1、机体;11、控制主体;12、悬臂机翼;121、悬臂杆;122、驱动电机;123、螺旋桨;2、起落架;21、支撑脚;211、抵接部;212、缓冲垫;22、拉撑臂;221、内杆;222、套管;223、滑移通道;224、拉撑弹簧。
具体实施方式
29.以下结合附图1-2对本技术作进一步详细说明。
30.本技术实施例公开一种支架式无人机。参照图1,支架式无人机包括机体1和起落架2。
31.机体1用于满足无人机正常的飞行功能。起落架2固定在机体1靠近地面的一侧,起落架2用于对机体1形成支撑,以便于机体1的起落。
32.机体1包括控制主体11和悬臂机翼12。悬臂机翼12设在控制主体11的外沿,且悬臂机翼12在控制主体11外沿圆周方向等间距分布。本实施例中,以三组悬臂机翼12为例进行说明。
33.参照图1和图2,悬臂机翼12包括悬臂杆121、驱动电机122和螺旋桨123。其中,悬臂杆121的一端与控制主体11固定连接,悬臂杆121的另一端沿远离控制主体11的方向水平延伸。悬臂杆121可以设置为中空管道,以使得无人机进一步满足轻量化的要求。驱动电机122固定在悬臂杆121远离控制主体11的一端,且驱动电机122的输出端沿竖直方向远离地面。驱动电机122可以采用伺服电机,以提高控制精度。螺旋桨123固定在驱动电机122的输出端上,以使得驱动电机122可以驱使螺旋桨123转动,从而使得无人机保持飞行。
34.驱动电机122与控制主体11电连接,控制主体11用于控制驱动电机122的启停,以达到控制无人机起落的目的。同时,控制主体11为驱动电机122供能。驱动电机122和控制主体11电连接的电缆可以穿设在悬臂杆121内,以使得悬臂杆121可以对电缆形成防护。
35.参照图1和图2,起落架2包括支撑脚21和拉撑臂22。起落架2与悬臂机翼12一一对应,支撑脚21可以设置为方杆状,支撑脚21的一端转动设置在悬臂杆121远离控制主体11的一端上,且三个支撑脚21的另一端沿相互靠近的方向延伸,即支撑脚21倾斜设置。支撑脚21对机体1进行支撑,以使得机体1与地面保持间隔。
36.参照图2,拉撑臂22设在机体1和支撑脚21之间,拉撑臂22用于对支撑脚21起到拉撑作用。拉撑臂22包括内杆221和套管222,内杆221可以设置为圆杆,套管222可以设置为内径等于内杆221直径的圆管。内杆221和套管222相互靠近的一端插接配合。内杆221远离套管222的一端铰接固定在悬臂杆121的外侧壁上,套管222远离内杆221的一端铰接在支撑脚21上。
37.套管222可以设置为一端开口且另一端封闭的结构,套管222内设有滑移通道223,本实施中,滑移通道223由套管222的内孔所构成,内杆221滑移设置在滑移通道223内。滑移通道223内设有拉撑弹簧224,拉撑弹簧224可以采用压簧制成。拉撑弹簧224的一端固定在内杆221伸入套管222的一端上,拉撑弹簧224的另一端固定设置在滑移通道223的封闭端上,且拉撑弹簧224远离内杆221的一端可以与滑移通道223的侧壁固定连接。内杆221在套管222内滑移时对拉撑弹簧224形成挤压,拉撑弹簧224压缩和复位的过程中,可以带动内杆221在套管222内往复运动。
38.机体1降落时,支撑脚21与地面相抵接并受压,支撑脚21沿靠近悬臂杆121的方向转动且对套管222形成挤压,支撑脚21驱使内杆221在套管222内滑移且对拉撑弹簧224进行压缩,以使得拉撑臂22对支撑脚21形成缓冲和支撑,从而使得机体1降落时不易产生晃动致使机体1倾倒。内杆221和套管222滑移时均发生转动,可以使得内杆221在套管222内滑移顺畅。机体1飞行时,支撑脚21悬空,拉撑弹簧224复位,拉撑弹簧224驱使内杆221在套管222内滑移,内杆221推动支撑脚21沿远离悬臂杆121的方向转动,此时拉撑臂22对支撑脚21起到对拉作用。
39.参照图1和图2,支撑脚21靠近地面的一端设有抵接部211。抵接部211由支撑脚21靠近地面的一端弯折所形成,抵接部211固定在支撑脚21靠近拉撑臂22的一侧,且抵接部211与支撑脚21之间呈钝角设置。机体1降落时,抵接部211先与地面相抵接,由于地面与抵接部211之间的夹角较小,地面更容易对抵接部211形成挤压,从而使得地面更容易驱使支
撑脚21转动。
40.抵接部211远离支撑脚21的一侧设有缓冲垫212。缓冲垫212固定在支撑脚21上,二者可以采用粘接固定的方式,也可以通过螺钉进行固定。缓冲垫212可以采用复合橡胶材料制成。抵接部211与地面相抵接时,缓冲垫212可以对抵接部211形成缓冲作用,以进一步增强机体1的防晃性。
41.本技术实施例一种支架式无人机的实施原理为:控制主体11控制驱动电机122并使其转动时,驱动电机122可以驱使螺旋桨123转动,从而使得螺旋桨123带动机体1飞行。当控制主体11控制主体11降落时,抵接部211与地面相抵接,此时缓冲垫212对抵接部211形成缓冲,地面通过抵接部211对支撑脚21形成挤压,支撑脚21受压后沿靠近悬臂杆121的方向滑移,以使得内杆221在套管222内滑移,并使得内杆221对拉撑弹簧224进行压缩,从而使得拉撑臂22对支撑脚21起到缓冲和支撑作用。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1