无人机组件和无人机的制作方法
1.本公开涉及无人机技术领域,具体地涉及一种无人机组件和无人机。
背景技术:
2.随着无人机的发展,因其具有机动灵活、反应快速、无人飞行、操作要求低等优点,引起了其在多个领域的应用,特别是在农业领域,作为农业航空器械的重要标志之一的农用多旋翼飞行器式的无人机得到了迅速应用和发展。
3.在无人机的作业过程中,需要面临各种复杂的环境状况,并使得整个无人机出现振动,如果振动导致无人机的线路松动或者磨损,会引起无人机功能不良。因此,如何提高无人机的环境适应能力,仍是本领域的重点发展方向。
技术实现要素:
4.本公开提供一种无人机组件和无人机,通过设置端子组件连接并固定用于连接电极和控制模块的线路,从而在保证线路对接的同时,降低线路的振动幅度,从而降低线路松动或者磨损情况的产生,以提高无人机的环境适应能力。
5.本公开第一方面提供一种无人机组件,该无人机组件包括控制模块、机臂、电机和端子组件,电机固定在机臂上,控制模块通过端子组件与电机电连接。端子组件包括固定座、第一端子、第二端子、第一线路和第二线路。固定座固定在机臂上。第一端子和第二端子配置为彼此连接且至少一方固定在固定座上。第一线路的一端与第一端子连接,第一线路的另一端与电机连接。第二线路的一端与第二端子连接,第二线路的另一端与控制模块连接。
6.在上述方案中,通过第一端子和第二端子连接用于连接控制模块和电机的第一线路和第二线路,且第一端子和第二端子中的至少一个固定在固定座上,相当于第一线路和第二线路也被固定在了固定座上,如此,在第一线路和第二线路的连接位置不会出现线路因振动而脱离的情况,而且也降低了第一线路和第二线路的振动幅度,从而降低线路出现磨损的风险。
7.在本公开第一方面的一个具体实施方式中,端子组件还包括用于连接第一端子和第二端子的紧固件。
8.在上述方案中,紧固件可以保证第一端子和第二端子的连接,以避免第一端子和第二端子脱离。
9.在本公开第一方面的一个具体实施方式中,第一端子包括第一过孔,第二端子包括与第一过孔相对的第二过孔,紧固件设置为贯穿第一过孔和第二过孔,以将第一端子和第二端子连接。
10.在上述方案中,通过将紧固件穿插在第一端子和第二端子中,可以进一步加强第一端子和第二端子之间连接的稳固程度。
11.在本公开第一方面的一个具体实施方式中,紧固件的一端固定在固定座上。
12.在本公开第一方面的一个具体实施方式中,机臂为两端具有开口的中空杆结构。控制模块和电机位于机臂的外侧,第一线路位于机臂之外,第二线路的至少部分位于机臂之内,机臂设置有供第二线路与控制模块连接的过孔。端子组件位于机臂的开口处,第二端子的用于连接第一端子的部分的延伸方向和第二端子的用于连接第二线路的部分的延伸方向相交,以使得第二端子为折线形。
13.在上述方案中,通过将第二端子设计为折线形,可以避免第二线路弯曲,从而降低第二线路在布置过程中出现因弯曲而出现的应力集中,如此,在振动时,可以进一步降低第一线路的振动幅度。
14.在本公开第一方面的一个具体实施方式中,控制模块为电调。
15.在本公开第一方面的一个具体实施方式中,无人机组件还可以包括防水结构。防水结构包括彼此连接的第一防水部和第二防水部。第一线路的与第一端子连接的部分和第一端子位于第一防水部中,且第二线路的与第二端子连接的部分和第二端子位于第二防水部中。
16.在上述方案中,设置防水结构之后,第一线路、第一端子、第二端子和第二线路的连接处不会受到水汽侵入的影响,从而提高无人机组件在雨雾等气候环境下的适应能力。
17.在本公开第一方面的一个具体实施方式中,在第一防水部和第二防水部的连接处,第一防水部和第二防水部之一设置为具有防水槽,第一防水部和第二防水部之另一设置为具有与防水槽匹配的防水凸起。
18.在本公开第一方面的一个具体实施方式中,无人机组件还可以包括固线架。固线架固定在电机上,且设置有穿线孔。第一线路穿过穿线孔以与电机连接。
19.在上述方案中,固线架设置在第一线路和电极的连接处,从而保证第一线路和电机连接的稳固性,即,通过设置固线架可以进一步降低第一线路的振动幅度且进一步降低第一线路从电机上脱离的风险。
20.在本公开第一方面的一个具体实施方式中,固线架的穿线孔中设置有减震胶,第一线路的位于穿线孔中的部分由减震胶包覆。
21.在上述方案中,通过设置减震胶可以对第一线路的振动进行缓冲,可以进一步降低第一线路的振动幅度,并避免第一线路在固线架中出现磨损。
22.本公开第二方面提供一种无人机,该无人机包括上述第一方面中的无人机组件。
附图说明
23.为了更清楚地说明本公开实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本公开的一些实施例,而非对本公开的限制。
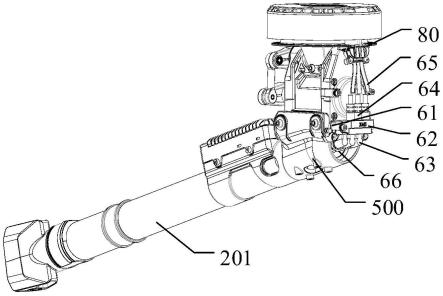
24.图1为本公开一实施例提供的一种无人机组件的立体结构示意图。
25.图2为图1所示无人机组件中的端子组件的结构示意图。
26.图3为图2所示的端子组件中的第一端子和第一线路的连接关系的示意图。
27.图4为图3所示的第一端子和第一线路的立体结构示意图。
28.图5为图2所示的端子组件中的第二端子和第二线路的连接关系的示意图。
29.图6为图5所示的第一端子和第一线路的立体结构示意图。
30.图7为图2所示的端子组件中的第一端子和第二端子的连接关系的示意图。
31.图8为图1所示的无人机组件的电机的爆炸图。
32.图9为图1所示的无人机组件中的固线架的立体结构示意图。
33.图10为本公开一实施例提供的一种无人机的立体结构示意图。
具体实施方式
34.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
35.无人机包括位于机臂上的电机组件,电机组件所包含的电机为无人机的螺旋桨旋转提供驱动力。在无人机工作时,因为螺旋桨的旋转以及周围环境的影响,机臂会振动,依附在机臂上的用于向电机供电的线路也会产生振动,从而导致线路脱离或者磨损,从而导致电机无法正常工作。
36.有鉴于此,本公开提供一种无人机组件和无人机,至少可以解决上述技术问题。该无人机组件包括控制模块、机臂、电机和端子组件,电机固定在机臂上,控制模块通过端子组件与电机电连接。端子组件包括固定座、第一端子、第二端子、第一线路和第二线路。固定座固定在机臂上。第一端子和第二端子配置为彼此连接且至少一方固定在固定座上。第一线路的一端与第一端子连接,第一线路的另一端与电机连接。第二线路的一端与第二端子连接,第二线路的另一端与控制模块连接。通过第一端子和第二端子连接用于连接控制模块和电机的第一线路和第二线路,且第一端子和第二端子中的至少一个固定在固定座上,相当于第一线路和第二线路也被固定在了固定座上,如此,在第一线路和第二线路的连接位置不会出现线路因振动而脱离的情况,而且也降低了第一线路和第二线路的振动幅度,从而降低线路出现磨损的风险。
37.下面,结合附图对根据本公开至少一个实施例中的无人机组件和无人机的结构进行详细地说明。
38.如图1~图7所示,无人机组件包括机臂200以及位于机臂200上的控制模块400、电机100和端子组件。电机100通过端子组件的第一线路65和第二线路66连接,第一线路65和第二线路66通过端子组件的第一端子64、第二端子63连接。端子组件的固定座61固定在机臂200上。第一端子64和第二端子63固定在固定座61上。如此,电机100依次通过第一线路65、第一端子64、第二端子63和第二线路66连通在一起,且第一端子64和第二端子63的连接处通过固定座61固定在机臂200上,使得第一线路65和第二线路66的振动程度降低。
39.例如,在本公开至少一个实施例提供的无人机组件中,端子组件还包括用于连接第一端子和第二端子的紧固件。如此,紧固件可以保证第一端子和第二端子的连接,以避免第一端子和第二端子脱离。例如,第一端子包括第一过孔,第二端子包括与第一过孔相对的第二过孔,紧固件设置为贯穿第一过孔和第二过孔,以将第一端子和第二端子连接,从而通过将紧固件穿插在第一端子和第二端子中,以进一步加强第一端子和第二端子之间连接的稳固程度。示例性,如图2和图7所示,第一端子64的与第二端子63连接的部分设置有开孔(称为第一过孔),相应地,第二端子63的与第一端子64连接的部分也设置有开孔(称为第二过孔),在第一端子64的与第二端子63连接时,第一过孔和第二过孔对应以使得紧固件67插
入。如此,保证第一端子64的与第二端子63稳固连接。
40.在本公开至少一个实施例提供的无人机组件中,紧固件的一端固定在固定座上。示例性的,如图2所示,紧固件67穿过第一过孔和第二过孔的部分插入固定座61中。如此,保证第一端子64的与第二端子63稳固连接的同时,第一端子64的与第二端子63不会产生晃动。例如,紧固件67可以为螺钉。需要说明的是,紧固件只要将第一端子64的与第二端子63固定连接在一起,并且固定(包括直接和间接)在机臂上即可,对于紧固件的设置方式不做限制,可以根据实际工艺的需求进行设计。
41.在本公开至少一个实施例提供的无人机组件中,机臂为两端具有开口的中空杆结构。控制模块和电机位于机臂的外侧,第一线路位于机臂之外,第二线路的至少部分位于机臂之内,机臂设置有供第二线路与控制模块连接的过孔。示例性的,如图1所示,机臂200包括一个呈圆柱形的中空杆体201。该杆体201包括的自由端(以无人机为参考,为机臂的远离无人机的机身的一端)以及固定端(以无人机为参考,为机臂的用于固定在无人机的机身上的一端)。控制模块400和电机100位于杆体201的外侧,而第二线路延伸至杆体201之内并通过杆体201的过孔(图中未示出)连接,如此,可以尽量将用于连接控制模块400和电机100的线路布置在杆体201内部,以对线路进行保护。
42.在上述情况下,用于连接控制模块400和电机100的线路需要弯折才能从电机延伸至杆体201的内部,如果该线路的初始形状并非是弯折形,那么在线路的布置过程中,线路的弯折处会形成应力集中。在此情况下,若受到振动的影响,线路的弯折处的应力会发生变化以出现例如重复弯折等情况,从而使得线路断裂的风险增加。
43.在本公开至少一个实施例提供的无人机组件中,端子组件位于机臂的开口处,第二端子的用于连接第一端子的部分的延伸方向和第二端子的用于连接第二线路的部分的延伸方向相交,以使得第二端子为折线形。如此,通过将第二端子设计为折线形,可以避免第二线路弯曲,从而降低第二线路在布置过程中出现因弯曲而出现的应力集中,如此,在振动时,可以进一步降低第一线路的振动幅度。示例性的,如图1、图2和图5~图7所示,第二端子63的整体形状为“l”形式的折线形,如此,第一线路65和第二线路66不需要弯曲布置,即可完成控制模块400和电机100的连接,相应地,该设计也更加便于安装第一线路65和第二线路66。
44.需要说明的是,在本公开的实施例中,对杆体201的材质不做限制,可以根据实际工艺的需求进行设计。例如,杆体201可以为碳纤维材料包裹的铝合金管,或者杆体201还可以为采用塑胶制成的塑胶管或者碳纤维材料制成的碳管。
45.需要说明的是,在本公开的实施例中,对控制模块的类型不做限制,可以根据实际工艺的需求进行选择。例如,控制模块可以为电调。
46.在无人机的实际应用中,会面临雨雾天气或者喷液工作的情况,从而使得无人机会受到水汽的侵害。在第一线路和第一端子的连接处、第一线路和第二端子的连接处仍是存在缝隙的,水汽有可能通过该缝隙侵入端子组件而腐蚀线路或者导致线路连接不良。
47.在本公开至少一个实施例提供的无人机组件中,无人机组件还可以包括防水结构。防水结构包括彼此连接的第一防水部和第二防水部。第一线路的与第一端子连接的部分和第一端子位于第一防水部中,且第二线路的与第二端子连接的部分和第二端子位于第二防水部中。设置防水结构之后,第一线路、第一端子、第二端子和第二线路的连接处不会
受到水汽侵入的影响,从而提高无人机组件在雨雾等气候环境下的适应能力。示例性的,如图2~图6所示,第一端子64(除了与第二端子63的连接端面)以及第一端子64与第一线路65的连接处外侧形成有第一防水部621,第二端子63(除了连接端面)以及第二端子63与第二线路66的连接处外侧形成有第二防水部611。如此,在第一防水部621和第二防水部611的包覆下,可以避免水汽侵入第一端子64与第一线路65的连接处、第二端子63与第二线路66的连接处。
48.例如,如图2所示,端子组件还可以包括外壳盖62,外壳盖62固定在固定座61上且包覆第一端子64和第二端子63的连接处。如此,在第一防水部621、第二防水部611和外壳盖62的配合下,可以避免水汽侵入端子组件的内部,使得第一线路65、第一端子64、第二端子63、第二线路66的连接处不会受到水汽的侵入。
49.在本公开至少一个实施例提供的无人机组件中,在第一防水部和第二防水部的连接处,第一防水部和第二防水部之一设置为具有防水槽,第一防水部和第二防水部之另一设置为具有与防水槽匹配的防水凸起。示例性的,如图2~图6所示,第一防水部621的与第二防水部611的连接端面形成有防水凸起622,第二防水部611的与第一防水部621的连接端面形成有防水槽612,第一端子64通过紧固件67与第二端子63连接时,第一防水部611和第二防水部621上的防水槽612和防水凸起622配合以封闭空隙。
50.在本公开至少一个实施例中,第一线路可以与电机的线圈连接。例如,电极可以包括定子、转子以及位于定子上的线圈。示例性的,如图1、图2和图8所示,电机100通过电机座500固定在杆体201的自由端。电机100包括基座10、固定地设置于基座10上的定子30、可转动地连接于基座10上的转子50、设置于转子50上的盖体70、设置于盖体70上的转轴90。基座10可以通过电机座500固定(例如套设等方式)在杆体201的自由端,基座10包括固定部12,定子30设置于固定部12上,定子30包括装设件以及绕设于装设件上的线圈。线圈通过端子组件60与控制模块400电连接。
51.在本公开的实施例中,对机臂上设置电机座的方式不作限制,可以根据实际工艺的需要进行设计。例如,除了上述实施例中提及的套设之外,电机座可以通过粘接、连接件(例如螺纹连接件)或连接结构(例如卡接结构)固定在机臂上。
52.例如,在本公开的实施例中,对电机的类型不做限制,可以根据实际工艺的需要进行设计。示例性的,如图1所示,电机100可以为三相电机,相应地,第一线路65的数量可以为三根,即为三相电源线。相对应地,第一端子64、第二端子63和第二线路66的数量也都为三根。例如,进一步的,电机100可以为三相直流无刷电机。
53.如图1所示,限于电机100的位置,第一线路65位于机臂200的杆体201的外侧,从而在工作过程中仍会发生晃动,从而使得第一线路65在晃动的过程中仍然存在与电机100脱离的风险。
54.在本公开至少一个实施例提供的无人机组件中,无人机组件还可以包括固线架。固线架固定在电机上,且设置有穿线孔。第一线路穿过穿线孔以与电机连接。固线架设置在第一线路和电极的连接处,从而保证第一线路和电机连接的稳固性,即,通过设置固线架可以进一步降低第一线路的振动幅度且进一步降低第一线路从电机上脱离的风险。示例性的,如图1、图8和图9所示,第一线路65通过固线架80与电机100的基座10连接,第一线路65穿设在固线架80上的穿线孔81内。如此,通过固线架80固定第一线路65的与电机100连接的
一端,从而降低第一线路65的振动幅度。
55.在本公开至少一个实施例提供的无人机组件中,固线架的穿线孔中设置有减震胶,第一线路的位于穿线孔中的部分由减震胶包覆。通过设置减震胶可以对第一线路的振动进行缓冲,可以进一步降低第一线路的振动幅度,并避免第一线路在固线架中出现磨损。
56.例如,在本公开的实施例中,如图9所示,固线架80可以设置有弹性槽82结构,以降低固线架80的重量,如此,不仅可以降低整个无人机组件及无人机的设计重量,还可以降低固线架80振动时的动能,从而降低固线架80的振动幅度,以提高固线架80对第一线路65的减震效果。例如,减震胶可以填充在该弹性槽82中。
57.本公开至少一个实施例提供一种无人机,该无人机包括上述的无人机组件。
58.示例性的,如图10所示,无人机包括机身1、设置于机身1上的起落架2和多个机臂200(图10中为两个)、设置于机臂200端部的电机100和端子组件(参见图1)以及设置于电机100上的螺旋桨(图中未示出),电机100用于驱动螺旋桨转动,从而带动无人飞行器飞行。例如,无人机的机身1或者起落架2可以用于搭载喷洒装置、摄影机、照相机等设备以时进行喷洒(例如农药喷洒)或摄影作业。
59.以上所述仅为本公开的较佳实施例而已,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1