一种混合式无人机
1.本发明涉及无人机领域,具体涉及一种混合式无人机。
背景技术:
2.微型飞行无人机在过去十年中得到了快速发展。然而,使用无人机仍然存在许多限制,因为它们容易受到刮风和下雨的影响。此外,当无人机在室内区域、小隧道、管道、污水通道、通风管道以及可能出现意外障碍物的密闭环境中运行时,它们的功能也会受到限制。由此可见,提高无人机在室内和密闭空间中的能力,非常有必要。
技术实现要素:
3.本发明的目的在于提供一种混合式无人机,该混合式无人机包括飞行和行走两种模式,当需要在狭小的空间内作业时,该混合式无人机可切换到行走模式。此外,本发明的混合式无人机还安装了吸附机构,当出现刮风和下雨等恶劣天气时,可利用吸附机构吸附在墙壁和木板等物体上。
4.为了解决上述技术问题,本发明采用以下技术方案:本发明一种混合式无人机,包括:主体机构、伸展机构、驱动机构和吸附机构。其中:所述主体机构包括机体、第一螺栓、保持架、摄像头、电池和第一转轴。所述机体是该无人机各机构装配的基础,所述机体上安装有摄像头,所述摄像头所在的一端为该无人机的头部,另一端为尾部。所述机体内部安装有电池,所述机体两侧各安装有一个第一转轴,共两个,所述第一转轴通过轴孔与驱动机构相连接。所述机体上方安装有四个保持架,头部和尾部各两个,所述保持架呈对称形式均匀分布。所述保持架通过第一螺栓固定在所述机体上,所述第一螺栓一共有八个,每个保持架上各有两个。
5.所述伸展机构包括伺服电机、旋转杆、第一连杆和第二连杆。所述伺服电机安装在机体上方的中部位置,该无人机使用的伺服电机被允许旋转的角度范围为0
°
到135
°
。所述伺服电机上安装有旋转杆,所述旋转杆随着所述伺服电机的转动而转动,所述旋转杆的旋转角度范围受到所述伺服电机的限制,所允许的转动范围也为0
°
到135
°
。所述旋转杆的两端各安装有一个第一连杆,所述第一连杆的末端安装有第二连杆,所述旋转杆、第一连杆与第二连杆之间均为转动连接。
6.所述驱动机构包括侧翼、轴孔、第一驱动电机、第二驱动电机、螺旋桨、固定架、第二螺栓、第二转轴、主动带轮、传动带、从动带轮、主动齿轮、从动齿轮、后轮和前轮。所述驱动机构位于无人机的两侧,两侧各有一个,呈对称分布,所述驱动机构通过侧翼与主体结构相连接。所述侧翼又通过轴孔与主体结构上的第一转轴相连接,所述侧翼可绕着第一转轴进行转动,允许转动的角度范围为0
°
到90
°
。所述侧翼上安装有两个第一驱动电机,无人机两侧各有两个,共四个。所述侧翼上安装有一个第二驱动电机,无人机两侧各有一个,共两个。所述第一驱动电机和第二驱动电机均采用无刷直流电机,所述第一驱动电机上安装有
螺旋桨,所述螺旋桨为三叶螺旋桨。所述第二驱动电机两侧各安装有一个固定架,共两个,所述固定架通过第二螺栓固定在所述侧翼上,每个固定架上各有两个所述第二螺栓,共四个。所述固定架之间安装有第二转轴,所述第二转轴与伸展机构中的第二连杆相连接,所述第二转轴与所述轴孔相互平行。所述侧翼的下面安装有主动带轮,所述主动带轮与所述第二驱动电机同轴心相连接并保持同步转动。所述主动带轮通过传动带带动从动带轮进行转动,所述从动带轮上安装有主动齿轮,所述主动齿轮与所述从动带轮同轴心相连接并保持同步转动。所述主动齿轮和从动齿轮构成了直齿圆柱齿轮传动,两轮的齿数比为1:4,所述从动齿轮上安装有后轮,所述后轮与所述从动齿轮同轴心相连接并保持同步转动。在侧翼的另一端安装有前轮,所述前轮为从动轮,后轮为主动轮,所述后轮驱动前轮进行转动,所述前轮和所述后轮位于同一条直线上。
7.所述吸附机构包括气泵、管子、气囊、气囊孔、止回阀片、吸盘、凝胶环、支架和第三螺栓。所述气泵安装在主体机构中的机体上,所述气泵的上方连接有管子,所述管子与气囊相连接,所述气囊的顶部开设有气囊孔,所述气囊孔的下面安装有止回阀片,所述止回阀片为矩形,所述止回阀片附着在所述气囊内表面,一组相对的两侧边焊接在气囊内表面上,而另一对侧边没有焊接。所述气囊安装在吸盘上,所述吸盘上安装有凝胶环,所述凝胶环使用聚氨酯凝胶材料,具有粘性。所述吸盘固定在支架上,所述支架通过第三螺栓将所述吸盘固定在所述机体上。
8.作为优选,规定摄像头所在一端为无人机的头部,另一端为无人机的尾部。
9.作为优选,所述主体机构中的机体上安装有四个保持架,前后各有两个,呈对称均匀分布。
10.作为优选,所述伸展机构中的旋转杆在伺服电机的带动下,被允许旋转的角度范围为0
°
到135
°
,规定伺服电机在不工作的状态下,旋转杆所在位置对应的角度为0
°
。
11.作为优选,所述伸展机构中的旋转杆和第一连杆在水平面内进行转动,第二连杆在竖直平面内进行转动。
12.作为优选,所述伸展机构中的第二连杆与驱动机构中的第二转轴同轴心相连接,第二连杆在第二转轴上自由滑动。
13.作为优选,所述驱动机构中的侧翼可绕着主体结构中的第一转轴进行转动,允许转动的角度范围为0
°
到90
°
,规定在侧翼表面和主体结构中的机体表面处于同一平面内时,两者之间的角度为0
°
。
14.作为优选,所述驱动机构中的螺旋桨使用第一驱动电机进行转动,前轮和后轮使用第二驱动电机进行转动,第一驱动电机和第二驱动电机均采用无刷直流电机。
15.作为优选,所述驱动机构中的主动齿轮和从动齿轮的齿数比为1:4,使用减速直齿轮驱动后轮转动。
16.作为优选,所述驱动机构中的主动带轮与第二驱动电机同轴心相连接并保持同步转动,从动带轮与主动齿轮同轴心相连接并保持同步转动,从动齿轮与后轮同轴心相连接并保持同步转动。
17.作为优选,所述吸附机构中的凝胶环采用聚氨酯凝胶材料,具有良好的粘性。
18.作为优选,所述吸附机构中的止回阀片为矩形,附着在所述气囊内表面,一组相对的两侧边焊接在气囊内表面上,而另一对侧边没有焊接。
19.作为优选,所述吸附机构中的气囊、吸盘、凝胶环和管子的中心轴线在同一条直线上。
20.该混合式无人机工作模式如下:一、飞行模式所述主体机构中的电池为整个无人机提供电能,在该模式下,伸展机构中的伺服电机没有通电,不会进行转动,所以,旋转杆、第一连杆和第二连杆也不会进行相应的转动。此时,旋转杆所在位置对应的角度为0
°
,第一连杆与第二连杆的轴线处于同一条直线上。第二连杆的一端通过第二转轴与驱动机构转动连接,而主体机构通过第一转轴与驱动机构转动连接,因此,在该模式下,主体机构中的机体上表面与驱动机构中的侧翼上表面之间始终处于同一平面内。所述驱动机构中,第一驱动电机工作,第二驱动电机关闭,此时,在第一驱动电机的作用下螺旋桨进行旋转,带动无人机的飞行,而后轮由于没有受到驱动力,所以不会进行转动。
21.二、行走模式所述驱动机构中的第一驱动电机停止工作,螺旋桨停止旋转。伸展机构中的伺服电机开始工作,伸展机构中的旋转杆在伺服电机的带动下开始进行转动,旋转杆被允许旋转的角度范围为0
°
到135
°
,第一连杆和第二连杆在旋转杆的推动下向外侧伸展,第二连杆一端与驱动机构中的第二转轴相连接。由于驱动机构中的轴孔与主体机构中的第一转轴相连接,驱动机构中的侧翼只能绕着第一转轴做旋转运动,第二连杆的伸展运动会受到限制。所以,第二连杆在向外侧伸展的同时也会进行一定的角度转动,从而带动侧翼进行转动,侧翼被允许转动的角度范围为0
°
到90
°
,可根据不同的工作场合进行相应的角度转动。此时,驱动机构中的第二驱动电机开始工作,带动主动带轮进行旋转,从动带轮在传动带的作用下旋转起来,进而主动齿轮进行转动并带动从动齿轮进行转动,后轮在从动齿轮的作用下进行转动,驱动无人机向前移动。
22.三、吸附模式无人机靠向所要吸附物体,直到吸附机构中的气囊与该物体接触,此时,气泵开始工作,通过管子抽吸气囊内部的空气,无人机继续向上飞行,直到抽空气囊内部的空气,吸盘上的凝胶环与该物体表面接触。气泵继续工作,止回阀片在吸力的作用下与气囊内部表面之间产生间隙,此时,气囊上的气囊孔发挥作用,气泵通过气囊孔抽吸气囊腔室内的空气,吸盘内的气压小于外部气压,在外部大气压力的作用下,凝胶环紧紧地吸附在该物体上,完成无人机的吸附工作。
23.四、分离模式气泵向气囊内部输入空气,在气流的推动下,止回阀片贴向气囊其表面,直到止回阀片与气囊内表面之间没有间隙,此时气囊孔不再工作。气泵继续输气,当吸盘腔室内的气压大于外部气压时,吸盘腔室内部不再有吸力,凝胶环与该物体表面分离,进而无人机完成分离工作。
24.本发明具有的有益效果是:1、本发明采用了两种驱动电机分别对螺旋桨、轮子进行控制。当无人机处于飞行模式时,第一驱动电机工作,第二驱动电机关闭;当无人机处于行走模式时,第二驱动电机工作,第一驱动电机关闭。这种结构可以保证螺旋桨和轮子在各自工作时互不干扰,同时也
避免了电机负载过大出现故障问题。
25.2、本发明的混合式无人机可进行侧翼的折叠,在一些特殊环境或者对无人机的机身宽度有限制的场合时,该无人机可从飞行模式转换为行走模式,利用轮子进行移动,并且可以通过调整折叠角度来适应不同的工作场合。
26.3、本发明中后轮使用1:4减速直齿轮进行驱动,降低了车轮的速度并增加了扭矩,从而提高了无人机的负载能力。
27.4、本发明安装了吸附结构,当出现刮风和下雨等恶劣天气时,该无人机可利用吸盘牢牢地吸附在墙壁和木板等物体上,从而减小受到的影响,保证正常工作。
附图说明
28.图1是本发明的整体结构示意图;图2是本发明中主体机构的整体示意图;图3是本发明中伸展机构的整体示意图;图4是本发明中驱动机构的整体示意图;图5是本发明中驱动机构的局部示意图;图6是本发明中吸附机构的整体示意图;图7是本发明中吸附机构的局部剖面示意图;图8是本发明中无人机的飞行模式示意图;图9是本发明中无人机的行走模式示意图;图10是本发明中吸附机构的工作原理图;图11是本发明中止回阀片的工作示意图。
具体实施方式
29.以下结合附图对本发明作进一步说明。
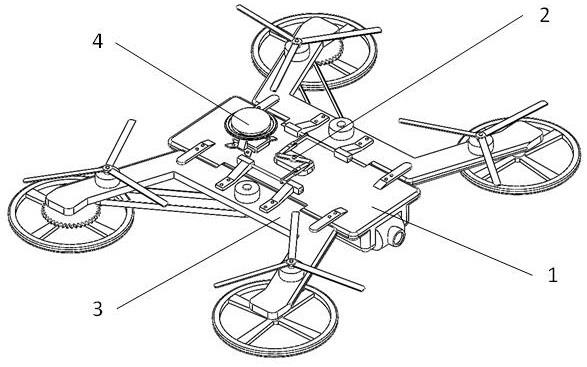
30.如图1所示,本发明的一种混合式无人机,包括主体机构1、伸展机构2、驱动机构3和吸附机构4。
31.如图2、图4所示,所述主体机构1包括机体1-1、第一螺栓1-2、保持架1-3、摄像头1-4、电池1-5和第一转轴1-6。所述机体1-1是该无人机各机构装配的基础,所述机体1-1上安装有摄像头1-4,所述摄像头1-4所在的一端为该无人机的头部,另一端为尾部。所述机体1-1内部安装有电池1-5,所述机体1-1两侧各安装有一个第一转轴1-6,共两个,所述第一转轴1-6通过轴孔3-6与驱动机构3相连接。所述机体1-1上方安装有四个保持架1-3,头部和尾部各两个,所述保持架1-3呈对称形式均匀分布。所述保持架1-3通过第一螺栓1-2固定在所述机体1-1上,所述第一螺栓1-2一共有八个,每个保持架1-3上各有两个。
32.如图2、图3所示,所述伸展机构2包括伺服电机2-1、旋转杆2-2、第一连杆2-3和第二连杆2-4。所述伺服电机2-1安装在机体1-1上方的中部位置,该无人机使用的伺服电机2-1被允许旋转的角度范围为0
°
到135
°
。所述伺服电机2-1上安装有旋转杆2-2,所述旋转杆2-2随着所述伺服电机2-1的转动而转动,所述旋转杆2-2的旋转角度范围受到所述伺服电机2-1的限制,所允许的转动范围也为0
°
到135
°
。所述旋转杆2-2的两端各安装有一个第一连杆2-3,所述第一连杆2-3的末端安装有第二连杆2-4,所述旋转杆2-2、第一连杆2-3与第二
连杆2-4之间均为转动连接。
33.如图2、图3、图4、图5所示,所述驱动机构3包括侧翼3-2、轴孔3-6、第一驱动电机3-7、第二驱动电机3-9、螺旋桨3-1、固定架3-4、第二螺栓3-3、第二转轴3-5、主动带轮3-11、传动带3-12、从动带轮3-13、主动齿轮3-14、从动齿轮3-15、后轮3-8和前轮3-10。所述驱动机构3位于无人机的两侧,两侧各有一个,呈对称分布,所述驱动机构3通过侧翼3-2与主体结构1相连接。所述侧翼3-2又通过轴孔3-6与主体结构1上的第一转轴1-6相连接,所述侧翼3-2可绕着第一转轴1-6进行转动,允许转动的角度范围为0
°
到90
°
。所述侧翼3-2上安装有两个第一驱动电机3-7,无人机两侧各有两个,共四个。所述侧翼3-2上安装有一个第二驱动电机3-9,无人机两侧各有一个,共两个。所述第一驱动电机3-7和第二驱动电机3-9均采用无刷直流电机,所述第一驱动电机3-7上安装有螺旋桨3-1,所述螺旋桨3-1为三叶螺旋桨。所述第二驱动电机3-9两侧各安装有一个固定架3-4,共两个,所述固定架3-4通过第二螺栓3-3固定在所述侧翼3-2上,每个固定架3-4上各有两个所述第二螺栓3-3,共四个。所述固定架3-4之间安装有第二转轴3-5,所述第二转轴3-5与伸展机构2中的第二连杆2-4相连接,所述第二转轴3-5与所述轴孔3-6相互平行。所述侧翼3-2的下面安装有主动带轮3-11,所述主动带轮3-11与所述第二驱动电机3-9同轴心相连接并保持同步转动。所述主动带轮3-11通过传动带3-12带动从动带轮3-13进行转动,所述从动带轮3-13上安装有主动齿轮3-14,所述主动齿轮3-14与所述从动带轮3-13同轴心相连接并保持同步转动。所述主动齿轮3-14和从动齿轮3-15构成了直齿圆柱齿轮传动,两轮的齿数比为1:4,所述从动齿轮3-15上安装有后轮3-8,所述后轮3-8与所述从动齿轮3-15同轴心相连接并保持同步转动。在侧翼3-2的另一端安装有前轮3-10,所述前轮3-10为从动轮,后轮3-8为主动轮,所述后轮3-8驱动前轮3-10进行转动,所述前轮3-8和所述后轮3-10位于同一条直线上。
34.如图2、图6、图7所示,所述吸附机构4包括气泵4-1、管子4-2、气囊4-3、气囊孔4-9、止回阀片4-8、吸盘4-5、凝胶环4-4、支架4-6和第三螺栓4-7。所述气泵4-1安装在主体机构1中的机体1-1上,所述气泵4-1的上方连接有管子4-2,所述管子4-2与气囊4-3相连接,所述气囊4-3的顶部开设有气囊孔4-9,所述气囊孔4-9的下面安装有止回阀片4-8,所述止回阀片4-8为矩形,所述止回阀片4-8附着在所述气囊4-3内表面,一组相对的两侧边焊接在气囊4-3内表面上,而另一对侧边没有焊接。所述气囊4-3安装在吸盘4-5上,所述吸盘4-5上安装有凝胶环4-4,所述凝胶环4-4使用聚氨酯凝胶材料,具有粘性。所述吸盘4-5固定在支架4-6上,所述支架4-6通过第三螺栓4-7将所述吸盘4-5固定在所述机体1-1上。
35.作为优选,如图3所示,所述伸展机构2中的旋转杆2-2在伺服电机2-1的带动下,被允许旋转的角度范围为0
°
到135
°
,规定伺服电机2-1在不工作的状态下,旋转杆2-2所在位置对应的角度为0
°
。
36.作为优选,如图3、图4所示,所述伸展机构2中的第二连杆2-4与驱动机构3中的第二转轴3-5同轴心相连接,第二连杆2-4在第二转轴3-5上自由滑动。
37.作为优选,如图2、图4所示,所述驱动机构3中的侧翼3-2可绕着主体结构1中的第一转轴1-6进行转动,允许转动的角度范围为0
°
到90
°
,规定在侧翼3-2表面和主体结构中的机体1-1表面处于同一平面内时,两者之间的角度为0
°
。
38.作为优选,如图4、图5所示,所述驱动机构3中的主动齿轮3-14和从动齿轮3-15的齿数比为1:4,使用减速直齿轮驱动后轮3-8转动。
39.作为优选,如图4、图5所示,所述驱动机构3中的主动带轮3-11与第二驱动电机3-9同轴心相连接并保持同步转动,从动带轮3-13与主动齿轮3-14同轴心相连接并保持同步转动,从动齿轮3-15与后轮3-8同轴心相连接并保持同步转动。
40.作为优选,如图6、图7、图9、图11所示,所述吸附机构4中的止回阀片4-8为矩形,附着在所述气囊4-3内表面,一组相对的两侧边焊接在气囊4-3内表面上,而另一对侧边没有焊接。
41.本发明的混合式无人机,包括四种应用模式,具体如下:一、飞行模式如图1、图2、图3、图4、图8所示,所述主体机构1中的电池1-5为整个无人机提供电能,在该模式下,伸展机构2中的伺服电机2-1没有通电,不会进行转动,所以,旋转杆2-2、第一连杆2-3和第二连杆2-4也不会进行相应的转动。此时,旋转杆2-2所在位置对应的角度为0
°
,第一连杆2-3与第二连杆2-4的轴线处于同一条直线上。第二连杆2-4的一端通过第二转轴3-5与驱动机构3转动连接,而主体机构1通过第一转轴1-6与驱动机构3转动连接,因此,在该模式下,主体机构1中的机体1-1上表面与驱动机构3中的侧翼3-2上表面之间始终处于同一平面内。所述驱动机构3中,第一驱动电机3-7工作,第二驱动电机3-9关闭,此时,在第一驱动电机3-7的作用下螺旋桨3-1进行旋转,带动无人机的飞行,而后轮3-8由于没有受到驱动力,所以不会进行转动。
42.二、行走模式如图1、图2、图3、图4、图5、图9所示,所述驱动机构3中的第一驱动电机3-7停止工作,螺旋桨3-1停止旋转。伸展机构2中的伺服电机2-1开始工作,伸展机构2中的旋转杆2-2在伺服电机2-1的带动下开始进行转动,旋转杆2-2被允许旋转的角度范围为0
°
到135
°
,第一连杆2-3和第二连杆2-4在旋转杆2-2的推动下向外侧伸展,第二连杆2-4一端与驱动机构3中的第二转轴3-5相连接。由于驱动机构3中的轴孔3-6与主体机构1中的第一转轴1-6相连接,驱动机构3中的侧翼3-2只能绕着第一转轴3-6做旋转运动,第二连杆2-4的伸展运动会受到限制。所以,第二连杆2-4在向外侧伸展的同时也会进行一定的角度转动,从而带动侧翼3-2进行转动,侧翼3-2被允许转动的角度范围为0
°
到90
°
,可根据不同的工作场合进行相应的角度转动。此时,驱动机构3中的第二驱动电机3-9开始工作,带动主动带轮3-11进行旋转,从动带轮3-13在传动带3-12的作用下旋转起来,进而主动齿轮3-14进行转动并带动从动齿轮3-15进行转动,后轮3-8在从动齿轮3-15的作用下进行转动,驱动无人机向前移动。
43.三、吸附模式如图1、图6、图7、图10、图11中(a)所示,无人机靠向所要吸附物体,直到吸附机构中的气囊4-3与被吸附的物体接触,此时,气泵4-1开始工作,通过管子4-2抽吸气囊4-3内部的空气,无人机继续向上飞行,直到抽空气囊4-3内部的空气,吸盘4-5上的凝胶环4-4与该物体表面接触。气泵4-1继续工作,止回阀片4-8在吸力的作用下与气囊4-3内部表面之间产生间隙,此时,气囊上4-3的气囊孔4-9发挥作用,气泵4-1通过气囊孔4-9抽吸气囊4-3腔室内的空气,以使得吸盘4-5内的气压小于外部气压,在外部大气压力的作用下,凝胶环4-4紧紧地吸附在该物体上,完成无人机的吸附工作。
44.四、分离模式如图1、图6、图7、图10、图11中(b)所示,气泵4-1向气囊4-3内部输入空气,在气流
的推动下,止回阀片4-8贴向气囊4-3其表面,直到止回阀片4-8与气囊4-3内表面之间没有间隙,此时气囊孔4-9不再工作。气泵4-1继续输气,当吸盘4-5腔室内的气压大于外部气压时,吸盘4-5腔室内部不再有吸力,凝胶环4-4与该物体表面分离,进而无人机完成分离工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1