一种能叫人起床的多功能飞行机器人
1.本发明涉及一种飞行机器人,具体涉及一种能叫人起床的多功能飞行机器人,属于飞行器控制、人工智能领域。
背景技术:
2.在当今时代发展较快的背景下,大部分人的学习、工作压力都很大。会经常出现晚睡的情况,造成白天起床很困难。对于睡眠很沉的人们,普通的闹钟很难将其叫醒,如果是在独居的情况下,迟到还给他们生活造成很多困扰;对于喜欢赖床的人,会习惯性地关闭闹钟,然后继续睡眠,这样都容易导致睡过头而影响他们正常的工作和学习生活。严重的,会错过一些重要的事情,特别是对于参加了工作的人们,甚至会有被辞退的风险。很多时候,这类人是需要这种能够强制叫醒他们的服务的。同时,每隔几分钟就闹一次的闹钟是会影响心脏健康的,会让心脏在短时间内受到3-4次压力,长期持续对心血管的影响很大。而且,人体在正常睡眠状态中会有一个准备入睡到浅层睡眠,再到深度睡眠,深度睡眠再回到浅度睡眠的阶段,这个循环约90分钟一次,一旦睡眠周期被闹钟打乱,这时就算赖床很久,也不会起到舒缓疲劳的效果,反而会越睡越累,此时更好的办法是需要睡眠者醒过来。因此考虑到起床困难人群的需求以及闹钟对睡眠者身体健康的影响,现提出一种能叫人起床的多功能飞行机器人。
技术实现要素:
3.在起床困难人群的需求下,本发明的目的在于提供一种能叫人起床的多功能飞行机器人,不仅能够强制唤醒喜欢赖床的人,还解决了睡眠较沉的人群对闹钟不敏感的问题。
4.为实现上述目的,本发明提供了如下的技术方案:
5.本发明提供了一种能叫人起床的多功能飞行机器人,包括外壳以及设置在外壳下方的底座,所述外壳内设有飞行组件以及与飞行组件连接的控制模块;底座内设有能够射出水柱的闹钟提醒模块;外壳内还设有充电模块以及给整个机器人供电的供电模块。
6.作为本发明的一种优选技术方案,飞行组件包括四旋翼,四旋翼设置在外壳内部,四旋翼由四个无刷电机和四个螺旋桨组成;四旋翼隐藏在外壳内部,四旋翼所在的外壳上部和下部有小孔,保证空气流通,使飞行机器人正常起飞,同时隐藏的四旋翼还保证了用户的安全,避免因发生故障或外界不确定性因素影响使螺旋桨对人体造成必要的伤害。
7.作为本发明的一种优选技术方案,控制模块包括mcu,以及与mcu连接的电机驱动模块,红外避障传感器模块设置在外壳的两侧表面和后表面,uwb定位模块设置在外壳内并与mcu连接,摄像头模块设置在底座上并与mcu连接。
8.作为本发明的一种优选技术方案,摄像头模块设包括双目摄像头模块和热成像摄像头模块,通过与mcu控制,双目摄像头模块进行人脸检测和目标测距,热成像摄像头模块具有热成像功能,通过热成像来辅助双目摄像头寻找目标。
9.作为本发明的一种优选技术方案,闹钟提醒模块包括储水箱、水枪模块以及抽水
泵电机模块,所述抽水泵电机模块的水路同时与储水箱和水枪模块连接,储水箱、水枪模块以及抽水泵电机模块同时与mcu电连接。水枪模块的出水口径为0.5mm,出水量小,不会担心对被褥产生喷湿的危害;还能够再达到唤醒用户条件时,启动水枪唤醒用户。
10.作为本发明的一种优选技术方案,还包括红外避障传感器模块,设置在外壳的两侧表面和后表面,并与mcu电连接。
11.作为本发明的一种优选技术方案,还包括智能语音模块,设置在外壳两侧表面,并与mcu电连接,智能语音模块能够发出闹铃声,而且具有语音识别功能,可以通过语音设置起床时间。
12.作为本发明的一种优选技术方案,还包括wifi模块和蓝牙模块,设置在外壳内,并与mcu电连接,作蓝牙模块能够和手机等智能设备相连,通过手机或者智能设备设置起床时间。
13.作为本发明的一种优选技术方案,还包括照明模块,设置在外壳前表面,并与mcu电连接。照明模块中含有光暗传感器,当光亮程度低与一定阈值时,会打开照明灯,用于照亮周围环境,同时辅助唤醒睡眠者。
14.作为本发明的一种优选技术方案,还包括oled显示屏、usb充电接口以及无线充电模块,oled显示屏设置在外壳上表面,usb充电接口设置在外壳后表面,无线充电模块设置在外壳内部,oled显示屏、usb充电接口以及无线充电模块均与与mcu电连接。usb充电接口以及无线充电模块同时与供电模块电连接,通过oled显示屏实现人机交互,设置起床时间。无线充电模块通过uwb模块定位使飞行机器人能够自行飞至无线充电接口自主充电。
15.本发明所达到的有益效果是:
16.(1)当闹铃唤醒不了睡眠者的时候,通过水枪射击用户的脸部,达到强制唤醒睡眠者的目的,解决了睡眠很沉,喜欢赖床等人群起床困难的困扰。而且飞行机器人在空中的时候,睡眠者因为距离不够,很难通过平时的习惯立马关闭闹钟,只有在用户很清醒而且已经起床的状态下,才能接触到飞行机器人而关闭闹钟。
17.(2)采用uwb定位模块实现飞行机器人室内精准定位,同时还有wifi模块辅助定位,进一步提高精度,不仅能够保证飞行机器人完成唤醒睡眠者任务后,能够自动返航,还能精准找到无线充电的地点,不需要起床者过多操作,节约起床者时间。
18.(3)设置的智能语音模块能够直接通过语音设置起床时间,起床铃声,方便快捷。
19.(4)设置的水枪模块,具体搭载有可伸缩电机结构,需要使用时会从底座凹槽弹出,不需要使用时收缩到凹槽内。搭载了抽水泵电机模块,枪口出还搭载了控制水柱射程的调节阀,需要根据双目摄像头反馈的方位和距离信息,通过设计合适的控制策略来控制抽水泵电机的功率以及水量调节阀的出水量达到精准的射击。
20.对于控制具体方式,提供如下方案:
21.为了保证水柱能够准确的射中人的脸部,需要控制好飞行器的姿态和位置,考虑到定点射击更能够提高准确率,所以需要飞行机器人调整好位置(距离人脸1-2m,即在水枪的射程内,人体的臂展范围外)之后保持不动。同时通过姿态控制使飞行器的滚转角和俯仰角为零,偏航角没有过多要求,但为了让水枪模块的控制更简单,将偏航角调整到正对人脸的方向。在飞行器的位置和姿态稳定后,问题转换为两自由度的云台的角度跟踪问题,使云台上的枪口能够跟踪摄像头模块提供的角度信息(即调整云台的俯仰角和偏航角,使枪口
能够正对人脸)。最后,需要根据双目摄像头测距所得到距离信息,调整抽水泵电机的功率,使水枪射出不同力度的水柱,达到精准射击的同时又不伤害人体。
22.(5)设置的蓝牙模块可以通过手机app连接飞行机器人,设置起床时间以及铃声。
23.(6)设置的wifi模块还能够实现联网功能,以便于下载多种用户喜欢的铃声,提升了体验感,而且还能在线更新飞行机器人系统。
24.(7)设置的双目摄像头模块能够检测人脸和测距,得到睡眠者的脸部方位和距离,并将信息传输给水枪模块,用于对睡眠者脸部进行瞄准。同时,设置的红外避障进一步保障了飞行机器人的运转,没有使用大量的避障模块,节省了成本,避免了资源浪费。
25.(8)设置的屏幕更方便实现人机交互。
附图说明
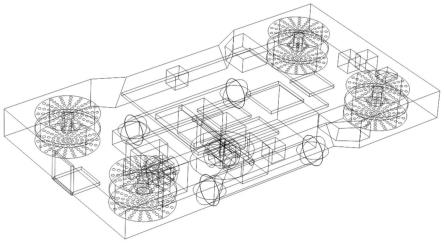
26.图1是本发明的整体结构示意图
27.图2是本发明的上半部分外壳结构示意图
28.图3是本发明的底座结构示意图
29.图中所示:
具体实施方式
30.本部分将结合附图和具体实施例对本发明作进一步的详细说明。
31.实施例1
32.如图1,图2及图3所示,本发明一种能叫人起床的多功能飞行机器人,包括飞行机器人的上半部分外壳结构和下半部分的底座结构,为了方便阅读,后面都简称为外壳和底座。外壳内部安装由四个无刷电机2和螺旋桨1组成的旋翼,旋翼上部和下部有通风口3,四个无刷电机2都与电机驱动模块4连接,电机驱动模块4与mcu11连接,外壳前部安装有照明灯模块14,照明灯模块由照明灯和光暗传感器组成,照明灯模块中的光暗传感器与mcu11连接,外壳两侧,顶部和尾部设有红外避障传感器6,红外避障传感器6与mcu11连接,外壳的顶部设有oled显示屏5,外壳的尾部设有usb接口10,外壳两侧还设有智能语音模块8,智能语音模块8能够采集和发出声音,智能语音模块8与mcu11连接,外壳内部还设有与mcu11连接的uwb定位模块13、蓝牙模块12、wifi模块9、无线充电模块7;底座前部设有容置摄像头模块的容置空间,摄像头模块19由摄像头19.1和云台19.2组成,摄像头模块19与mcu11连接,底座中部设有水枪模块18的容置空间,水枪模块18由水枪18.1、云台18.2、伸缩电机18.3组成,水枪模块18与微型抽水泵电机15通过水管17相连,水枪枪头18.1还有控制出水量的阀门电机,底座两侧还设置有储水箱16,储水箱16与微型抽水泵电机15通过水管相连,此外飞行机器人还设置有锂电池,为了图片简洁清晰,锂电池、照明灯模块14的光暗传感器和水枪模块18的阀门电机以及一些飞行器所用到基本传感器如:陀螺仪及加速度计等都没有在图中展示。
33.实施例2
34.如图2所示,当用户使用本飞行机器人时,需要先设置起床时间,可以通过智能语音模块8、oled显示屏5、连接手机蓝牙三种方式设置闹钟时间,到规定时间,通过智能语音模块8输出闹钟铃声,同时飞行机器人起飞。
35.实施例3
36.如图2和图3所示,摄像头19.1上搭载了云台19.2,能够灵活的调整角度,便于寻找目标,通过摄像头模块19.1定位人脸位置,摄像头模块19.1有两个子模块,一个是双目视觉模块,应用深度学习以及神经网络技术,能够起到人脸检测和测距的功能;同时还有热成像摄像头,能够检测周围的温度,生成热图像,由于正常人的体温是36-37度之间,将温度阈值设置在36-37度之间,允许波动范围为5%,生成的深度图加上热图像,两者同时输入给mcu11处理,得到比单一摄像头更加精准的人脸方位和距离;智能语音模块8发出的闹铃声会在10分钟内响铃两次,若十分钟内还是没有接收到人通过oled显示屏5输入的起床信号,mcu11就会将人脸方位和距离信息输出给水枪模块18。
37.实施例4
38.如图2和图3所示,当水枪模块18接收到mcu11提供的人脸方位和距离信号时,水枪模块18启动时,水枪18.1通过伸缩电机18.3丛容置空间伸出,通过编写好的算法,调整飞行器的姿态以及水枪模块云台18.2的俯仰角;确定好方位后,同时还需要控制出水力度,出水力度通过mcu11控制微型抽水泵电机15的转速以及水枪枪口18.1出的阀门电机来实现。其中,抽水泵电机15连接水箱16和水枪模块18。当用户在规定时间范围没醒就会打开枪口阀门,射出水柱,精准命中睡眠者脸部。
39.实施例5
40.如图2所示,当起床时间到了的时候,照明灯模块14上的光暗传感器可以检测周围环境的亮,当亮度阈值低与一定值,mcu11会控制照明灯14亮起,一方面便于在较暗的环境下唤醒用户,另一方面,可以给用户和摄像头19提供更好的视野。
41.实施例6
42.如图2所示,uwb模块13用于室内定位,同时wifi模块9也可以辅助定位,用于飞行机器人确定自身位置,wifi模块9还能够通过联网更新飞行机器人的系统。
43.实施例7
44.如图2所示,飞行机器人还有无线充电模块7,无线充电器会向飞行机器人发送位置信号,当用户确认起床,而且通过屏幕5给飞行机器人输入已起床信号,飞行机器人通过设计好控制策略,自行快速稳定精准地返回无线充电器处。
45.以上结合附图对本发明的具体实施例进行了详细描述,同时本发明并不局限于上述特定实施方式,应当指出的是本领域技术人员在不脱离本发明思想的前提下,还可以做出若干变化或改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1