一种基于空间绳网的变绳长消旋方法
1.本发明属于空间碎片清理领域,具体涉及一种基于空间绳网的变绳长消旋方法。
背景技术:
2.近年来人类的太空活动日益频繁,伴随产生的空间碎片和失效卫星的数量也在不断增长,这些碎片不仅会占用轨道资源,也有对现有航天器产生碰撞的危险,轻则使现有航天器改变姿态和轨道,重则导致现有航天器损坏甚至解体,从而产生新的碎片,因此对空间碎片的清理迫在眉睫。
3.空间中的碎片或失效的航天器由于长时间在太空中停留,并处于摄动力作用下,运动状态非常复杂。现有的空间目标附着技术主要有空间绳网,空间飞矛和飞爪,机械臂以及绳系机器人等。在对失效的目标进行附着时,若失效目标未达到稳定状态或空间机器人与目标之间未实现零相对速度,会导致附着难度大大增加,甚至导致的物理碰撞会损坏空间机器人产生更多的空间碎片,所以对空间目标消旋非常有必要。
4.在《空间非合作目标消旋技术研究现状总结与展望》一文中提出,现有的消旋方法总的来说可以分为两类,第一类是基于能量转移的消旋技术,即将目标与空间附着机器人看成一个能量守恒的总体,将目标的角动量转移到空间附着机器人上达到消旋的目的,系统总能量保持不变;第二类是基于能量损耗的消旋技术,空间附着机器人对目标施加一定的力或者力矩以损耗目标的动能和角动量,从而抑制目标的自旋运动。然而第一类在进行消旋时,因为空间附着机器人与目标附着在一起,无法对目标完全消旋并且获得角动量的空间附着机器人无法对多个目标进行消旋。第二类在进行消旋时,实施的危险性较高,极容易造成空间附着机器人的失稳,且消耗大量能量。
技术实现要素:
5.本发明提出了一种基于空间绳网的变绳长消旋方法,通过自主机动单元将绳网附着到空间碎片或失效卫星后,利用改变绳长的方式,控制对目标进行消旋。
6.实现本发明的技术解决方案为:一种基于空间绳网的变绳长消旋方法,利用n个自主机动单元均匀布置在绳网的周围,自主机动单元分别通过绳索与绳网连接,任意两个自主机动单元之间采用互补镶嵌式设计,n≥4;在绳网捕获目标后,自主机动单元获取目标的状态参数进行解算,随后根据解算的参数控制其携带的系绳控制机构释放绳长到合适的位置,并启动推力对目标进行消旋。
7.本发明与现有技术相比,其显著优点在于:
8.(1)通过改变绳索的长度,运用角动量守恒定律来进行消旋的方法,相较于传统的消旋方法具有能量消耗少。
9.(2)通过自主机动单元进行绳索长度的控制,实现了对消旋目标力矩的可控,避免了空间附着机器人的失稳现象,相比于传统消旋方法具有稳定消旋的优势。
10.(3)通过自主机动单元对绳索的完全控制,全程避免了绳网在空间中的缠绕现象,
相比于传统的绳网消旋方法具有可靠性的优势。
附图说明
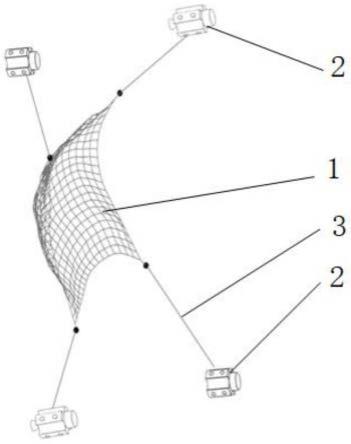
11.图1为本发明的总体三维示意图。
12.图2为本发明的绳索伸缩三维示意图,其中图2中的(a)为绳索收缩状态,图2中的(b)为绳索伸出状态。
13.图3为本发明的消旋过程示意图,其中图3中的(a)为附着目标状态,图3中的(b)为消旋目标状态,图3中的(c)为回收目标状态。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
15.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应作广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;“连接”可以是机械连接,也可以是电连接。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
16.下面将结合本设计实例对具体实施方式、以及本次发明的技术难点、发明点进行进一步介绍。
17.结合图1~图3,一种基于空间绳网的变绳长消旋方法,利用n个自主机动单元2均匀布置在绳网1的周围,分别通过绳索3与绳网1连接,任意两个自主机动单元2之间采用互补镶嵌式设计,n≥4。在绳网捕获目标后,自主机动单元2获取目标的状态参数进行解算,随后根据自主机动单元2解算的参数控制携带的系绳控制机构释放绳长到合适的位置,并启动推力对目标进行消旋。
18.一张方形柔性绳网最少配备四个自主机动单元构成一个空间绳网机器人,所述自主机动单元2上配有系绳控制机构进行绳索的储存,伸长和收缩。
19.所述基于空间绳网的变绳长消旋方法,步骤如下:
20.步骤1、当发现待消旋目标时,母星平台靠近目标,并同时释放n个自主机动单元2,绳网1在上述自主机动单元2的牵引下靠近目标进行捕捉。
21.步骤2、捕捉到目标后,绳网1和自主机动单元会跟随目标一起旋转,形成绳网1、自主机动单元2和目标一起组成的组合体,此时自主机动单元2获取组合体的状态参数,包括角速度ω、转动惯量i。
22.步骤3、根据获取组合体的状态参数,自主机动单元2对当前的姿态进行解算,得到组合体的角动量l、组合体的质量m、组合体围绕旋转轴旋转的旋转半径r1:
23.l=iω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
24.i=mr
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
25.l=mr
12
ω
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
26.其中,l为组合体的角动量;
27.ω为组合体的角速度;
28.r1为组合体围绕旋转轴旋转的旋转半径;
29.m为组合体的质量。
30.由(3)式可知,在不受外力时,也就是角动量l保持不变时,对于组合体的旋转半径组合体的角动量l、组合体的质量m、组合体围绕旋转轴旋转的旋转半径r1增大将会使组合体的角速度ω减小。
31.步骤4、组合体的角动量l、组合体的质量m、组合体围绕旋转轴旋转的旋转半径r1,设定在t时间内完成对目标的消旋,通过自主机动单元2上的系绳控制机构对绳索3的长度进行控制,并提供侧向推力完成消旋,则有:
[0032][0033][0034]
m=fr2ꢀꢀꢀꢀꢀꢀ
(6)
[0035]
其中,β为组合体的角加速度;
[0036]
m为使组合体消旋所提供的力矩;
[0037]
f为自主机动单元2提供的最大侧向推力;
[0038]
r2为绳索伸长后组合体围绕旋转轴旋转的旋转半径。
[0039]
由式(4)(5)(6)可以计算出绳长的伸长量r:
[0040][0041]
自主机动单元2根据计算出的伸长量r对绳索3进行控制,并提供侧向推力f,最终完成组合体的消旋。
[0042]
进一步地,所述绳网1用于附着和收纳空间碎片以及失效卫星。绳网1在工作过程中,需要有较大的强度,耐高低温,抗强辐射,抗剪切以及为了节约发射成本需要较轻的质量等,故绳网1的材料选择芳纶ⅲ纤维,而且线径2mm的芳ⅲ绳的额定断裂强度可为4000n,采用平面四边型网状结构,边长20m。
[0043]
所述自主机动单元2具有在轨机动能力,提供的最大侧向推力为f,并拥有视觉探测、姿态检测、数据处理、数据通信能力。
[0044]
所述绳索3两端分别连接在绳网1与自主机动单元2,自主机动单元2上的系绳控制机构,完成绳索3的储存,伸长和收缩功能。
[0045]
实施例1
[0046]
空间绳网机器人在附着目标后,伴随目标一起旋转,形成一个组合体,此时自主机动单元2获取组合体参数,绳索3处于收缩状态,如图3中的(a)所示。在随目标一起旋转的过程中,自主机动单元2开始对组合体姿态进行解算,并且计算出消旋所需要的绳长r。根据计算的绳长r,自主机动单元2进行绳索3的释放,如图3中的(b)所示,此时绳索处于伸长状态,自主机动单元2提供侧向推力,完成对目标的消旋,最后自主机动单元2组合后将目标回收拖走,如图3中的(c)所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1