一种仿生蜻蜓机器人
1.本发明涉及仿生蜻蜓机器人技术领域,具体涉及一种仿生蜻蜓机器人。
背景技术:
2.蜻蜓的种类较多,分布较广,目前已知的蜻蜓接近5900种,其中我国记录的种类大约有650种,是蜻蜓多样性最高的国家之一。
3.蜻蜓被认为是飞行行为简单且机动高效的昆虫之一,因此成为众多微型飞行器的仿生设计原型。譬如申请公布号为cn112937854a,名称为仿生蜻蜓扑翼机构的专利技术,授权公告号为cn206590117u,名称为一种仿生蜻蜓结构的专利技术以及授权公告号为cn206654196u,名称为一种仿生蜻蜓机构的专利技术,均是仿生蜻蜓微型飞行器。
4.上述技术均是采用轮系结构实现扑翼的上下扑动,扑翼的转动通过多连杆机构实现,其结构比较复杂,控制难度高,动力传递效率低,且加工制造不便,质量也比较重,十分影响仿生蜻蜓的稳定飞行。
技术实现要素:
5.针对现有技术的上述不足,本发明提供一种仿生蜻蜓机器人;该仿生蜻蜓机器人重新设计扑翼驱动机构,结构简单,易控制,动力传递效率高,加工制造方便,且质量轻,可以很好的稳定飞行。
6.为了解决上述技术问题,本发明提供的一种仿生蜻蜓机器人,包括蜻蜓机体,所述蜻蜓机体的背部开设有开口朝上的背腔,背腔内设置有电机以及与电机连接的两级单曲柄摇杆机构,两级单曲柄摇杆机构连接有扑翼,扑翼包括前扑翼和后扑翼。
7.本发明进一步改进中,上述蜻蜓机体的背腔内设置有隔板,隔板将背腔分隔为前驱动腔和后控制腔;所述前驱动腔内设置有两级单曲柄摇杆机构,后控制腔内设置有主板以及与主板分别连接的可充电式锂电池、拨动开关和电机;所述电机的输出端连接有传动轴,传动轴穿过嵌接在隔板上的轴承与两级单曲柄摇杆机构连接。
8.通过上述设计,本方案可更便于两级单曲柄摇杆机构、可充电式锂电池、拨动开关和电机等的安装。
9.本发明进一步改进中,上述两级单曲柄摇杆机构包括与传动轴连接的一级曲柄摇杆机构、与一级曲柄摇杆机构连接的驱动轴以及与驱动轴连接的二级曲柄摇杆机构;所述一级曲柄摇杆机构与后扑翼连接,二级曲柄摇杆机构与前扑翼连接。
10.通过上述设计,本方案可更便于驱动前扑翼、后扑翼。
11.本发明进一步改进中,上述一级曲柄摇杆机构包括与传动轴连接的一级曲柄、与一级曲柄右侧连接的一级连杆以及与一级连杆上端的前后两侧分别铰接的前一级摇杆和后一级摇杆,前一级摇杆和后一级摇杆分别连接有后扑翼。
12.前一级摇杆上和后一级摇杆上分别设置连接孔,后扑翼插接在连接孔中,并注上密封胶;后扑翼的根部可焊接加强板,加强板与前一级摇杆上和后一级摇杆上焊接,加强板
可增加后扑翼根部的支撑强度。
13.通过上述设计,本方案可更便于驱动后扑翼,电机带动一级曲柄转动,一级连杆在一级曲柄的带动下,带着前一级摇杆和后一级摇杆来回摆动,前一级摇杆和后一级摇杆上后扑翼也跟着来回摆动。
14.本发明进一步改进中,上述一级连杆的底端与驱动轴的右侧连接。
15.通过上述设计,本方案可更便于动力的传递,驱动轴在一级连杆的带动下转动,并将动力传递给二级曲柄。
16.本发明进一步改进中,上述二级曲柄摇杆机构包括与驱动轴中部连接的二级曲柄、与二级曲柄左侧连接的二级连杆以及与二级连杆上端的前后两侧分别铰接的前二级摇杆和后二级摇杆,前二级摇杆和后二级摇杆分别连接有前扑翼。
17.前二级摇杆上和后二级摇杆上分别设置连接孔,前扑翼插接在连接孔中,并注上密封胶;前扑翼的根部可焊接加强板,加强板与前二级摇杆上和后二级摇杆上焊接,加强板可增加前扑翼根部的支撑强度。
18.通过上述设计,本方案可更便于驱动前扑翼,驱动轴带动二级曲柄转动,二级连杆在二级曲柄的带动下,带着前二级摇杆和后二级摇杆来回摆动,前二级摇杆和后二级摇杆上前扑翼也跟着来回摆动。
19.本发明进一步改进中,上述前驱动腔的左右边沿上分别设置有左双铰接座和右双铰接座,左双铰接座与后二级摇杆和前一级摇杆分别铰接,右双铰接座与前二级摇杆和后一级摇杆分别铰接。
20.通过上述设计,本方案可更便于支持前二级摇杆、后一级摇杆、后二级摇杆和前一级摇杆的摆动。
21.本发明进一步改进中,上述扑翼的翅脉采用内稀外密结构,扑翼的翅脉截面形状为椭圆形,扑翼的翅膜采用内厚外薄结构。
22.通过上述设计,本方案的扑翼可更便于与蜻蜓翅相仿,更利于提高飞行稳定性。
23.本发明进一步改进中,上述前扑翼和后扑翼的相位差为45
°
,扑动幅度值为35
°
。
24.通过上述设计,本方案可更便于前扑翼和后扑翼的摆动,更利于飞行稳定性。
25.本发明进一步改进中,上述蜻蜓机体的眼部安装有微型摄像装置,微型摄像装置与主板连接,微型摄像装置将收集的影像信息发至主板,主板利用无线信号将影像信息发至实验室的电脑上或者其他控制终端,以便拱研究员查看。
26.通过上述设计,本方案可更便于收集影像资料。
27.与现有技术相比,本发明具有如下有益效果:
28.本发明重新设计扑翼驱动机构,利用两级单曲柄摇杆机构驱动扑翼,结构简单,易控制,动力传递效率高,加工制造方便,且质量轻,可以很好的稳定飞行。
附图说明
29.为更清楚地说明背景技术或本发明的技术方案,下面对现有技术或具体实施方式中结合使用的附图作简单地介绍;显而易见地,说明书附图所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小
的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容所能涵盖的范围内。
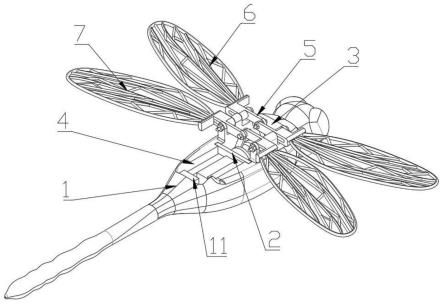
30.图1是本发明具体实施方式的第一视角结构示意图。
31.图2是本发明具体实施方式的第二视角结构示意图。
32.图3为本发明具体实施方式的第二视角结构示意图。
33.图4为本发明具体实施方式的蜻蜓机体第一视角结构示意图。
34.图5为本发明具体实施方式的蜻蜓机体第二视角结构示意图。
35.图6为本发明具体实施方式的蜻蜓机体第三视角结构示意图。
36.图7是本发明具体实施方式的电机、两级单曲柄摇杆机构第一视角结构示意图。
37.图8是本发明具体实施方式的电机、两级单曲柄摇杆机构第二视角结构示意图。
38.图9为本发明具体实施方式的电机、两级单曲柄摇杆机构第三视角结构示意图。
39.图10为本发明具体实施方式的两级单曲柄摇杆机构第一视角结构示意图。
40.图11为本发明具体实施方式的两级单曲柄摇杆机构第二视角结构示意图。
41.图12为本发明具体实施方式的两级单曲柄摇杆机构第三视角结构示意图。
42.图13是现有技术中的平面单曲柄双摇杆机构示意图。
43.图14是现有技术中的平面双曲柄双摇杆机构示意图。
44.图15为本发明前扑翼传动机构简图。
45.图16为本发明几何模型示意图。
46.图17为本发明扑动示意图。
47.图18为蜻蜓翅膀扑动方式扑动角随时间的变化曲线示意图1。
48.图19是蜻蜓翅膀扑动方式扑动角随时间的变化曲线示意图2。
49.图20是蜻蜓翅膀扑动方式扑动角随时间的变化曲线示意图3。
50.图21为气动力随相位差变化曲线示意图1。
51.图22为气动力随相位差变化曲线示意图2。
52.图中所示:1-蜻蜓机体;2-隔板;3-前驱动腔;4-后控制腔;5-两级单曲柄摇杆机构;6-前扑翼;7-后扑翼;8-主板;9-电机;91-传动轴;10-可充电式锂电池;11-拨动开关;12-一级曲柄;13-一级连杆;14-后一级摇杆;15-前一级摇杆;16-驱动轴;17-二级曲柄;18-二级连杆;19-后二级摇杆;20-前二级摇杆;21-左双铰接座;22-右双铰接座;23-支撑板。
具体实施方式
53.为了使本技术领域的人员更好的理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
54.同时,本说明书中所引用的术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限
制,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
55.同时,在本说明书的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个部件内部的连通,对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
56.蜻蜓是世界上眼睛最多的昆虫。它的眼睛又大又鼓,占据着头的绝大部分,有三个单眼,复眼约由28000多只小眼组成,而每只小眼睛又都自成体系,各自具有屈光系统和感觉细胞,而且都有视力,视力极佳;上部分看远处,下部分看近处;这样它在空中捕捉小虫时,便能得心应手,百发百中,从不落空。
57.蜻蜓翅发达,前后翅等长而狭,膜质、网状翅脉极为清晰,飞行能力很强,每秒钟可达10米,既可突然回转,又可直入云霄;它的远程飞行更惊人。有一种蜻蜓可从英国东海岸,越海到法国;还有一种海蜻蜓能从赤道附近飞到日本;澳大利亚的海蜻蜒可从澳洲大陆飞到距大陆500千米的海域上巡游,一个来回就是1000千米;由此看来,蜻蜓具有较强的的飞行能力。
58.翅的前缘,近翅顶处,各有1个翅痣,呈长方形或方形,可保持翅的震动规律性,并可防止因震颤而折伤;人们根据这个启示,在飞机两翼上加上一块平衡重锤,这样就避免了飞机在高速飞行时,常因发生剧烈振动引起操纵失灵,甚至折断机翼的事故。
59.正是因为蜻蜓的这些特点,使得蜻蜓成为物种最丰富的生物之一;因此,仿生蜻蜓的研究是有重要意义的。
60.本仿生蜻蜓机器人(扑翼飞行器)采用电机驱动方式,采用柔性铰链聚酰亚胺连接,其具有不易变形、阻燃性高和稳定性好等特点,弹性模量小,极大减小了扑翼飞行器飞行时的运动阻力。
61.机身为利用3d打印技术制造出蜻蜓的头部及身体,材料主要采用pla材料,整体质量为90g,身长28cm,最大翼展为25cm,前后两对翅膀的相位差为45
°
,扑动幅度值为35
°
,结构轻便,飞行自如,刚度大、抗变形能力强、密度小,在制造零件时,翅根位置可增加上支撑部件提高翅根部件的强度和刚度性能,更好的防止发生变形和断裂。
62.主体结构是蜻蜓头部、身体及两对扑翼组成,电机置于蜻蜓身体的中部,当电机转动时,与其直接相连的一级曲柄摇杆机构运动进而带动后翼(后扑翼)扑动,前翼(前扑翼)的二级曲柄摇杆机构通过共用驱动轴相连,前后扑翼初始相位差为45度,由于其运动的同时性,此后运动中,两者始终保持此相位差扑动,实现了对蜻蜓飞行姿态的控制。
63.本技术中电机采用ga12-n20微型直流减速电机,及3.7v耐高温可充电锂电池,满足重量较轻且供能较长的要求。
64.本技术方案如下:
65.如图1-3所示,一种仿生蜻蜓机器人,包括蜻蜓机体1,所述蜻蜓机体1的背部开设有开口朝上的背腔,背腔内设置有电机9以及与电机9连接的两级单曲柄摇杆机构5,两级单曲柄摇杆机构5连接有扑翼,扑翼包括前扑翼6和后扑翼7。
66.其中,如图4-6所示,所述蜻蜓机体1的背腔内设置有隔板2,隔板2将背腔分隔为前驱动腔3和后控制腔4;所述前驱动腔3内设置有两级单曲柄摇杆机构5,后控制腔4内设置有
主板8以及与主板8分别连接的可充电式锂电池10、拨动开关11和电机9;所述电机9的输出端连接有传动轴91,传动轴91穿过嵌接在隔板2上的轴承与两级单曲柄摇杆机构5连接。
67.其中,可充电式锂电池10采用3.7v可充电式聚合物锂电池,最大电流130毫安,智能ic芯片,内带防过充防过放保护板;拨动开关11采用ss12d10立式滑动开关,拨动开关3脚2档,柄高5mm,额定负荷50v,0.5a;电机外壳采用优质铝材制作,耐腐蚀,不易生锈,同时采用优质线圈,寿命更长,不易产生热量。
68.电机在整个飞行器中占的重量比例最大,应尽可能地减少电机重量带来的影响,结合飞行器的内部设计电机采用直径为3mm的ga12-n20电机,考虑到电源对飞行器的重要性,电池选择可充电的小型蓄电池,可满足重量较轻供能较长的要求,直流电机可以方便地通过改变电压调节转速,并可以提供较大的转矩,适用于需要频繁调节转速的负载,同时直流电机还有一个优点是便宜。
69.主板8上设置有控制电机9的智能芯片和指示灯,可充电式锂电池10充满指示灯变灯,快捷方便,智能芯片上设置有无线信号收发模块,可供工作人员进行远程无线控制电机9,主板8上设置有保护电路,当电池充满自动停充,保护电池,防止过充;拨动开关是通过拨动开关柄使电路接通或断开,从而达到切换电路的目的;导件采用优质铜件材料,安全耐用,使用寿命长,一般用于低压电路,滑块动作灵活,性能稳定可靠。
70.其中,如图7-9所示,所述两级单曲柄摇杆机构5包括与传动轴91连接的一级曲柄摇杆机构、与一级曲柄摇杆机构连接的驱动轴16以及与驱动轴连接的二级曲柄摇杆机构;所述一级曲柄摇杆机构与后扑翼7连接,二级曲柄摇杆机构与前扑翼6连接。
71.其中,如图10-12所示,所述一级曲柄摇杆机构包括与传动轴91连接的一级曲柄12、与一级曲柄12右侧连接的一级连杆13以及与一级连杆13上端的前后两侧分别铰接的前一级摇杆15和后一级摇杆14,前一级摇杆15和后一级摇杆14分别连接有后扑翼7。
72.其中,如图10-12所示,所述一级连杆13的底端与驱动轴16的右侧连接;所述前驱动腔3内设置有支撑板23,驱动轴16穿过支撑板23上嵌接的轴承与二级曲柄17连接。
73.其中,如图10-12所示,所述二级曲柄摇杆机构包括与驱动轴16中部连接的二级曲柄17、与二级曲柄17左侧连接的二级连杆18以及与二级连杆18上端的前后两侧分别铰接的前二级摇杆20和后二级摇杆19,前二级摇杆20和后二级摇杆19分别连接有前扑翼6。
74.其中,如图1-6所示,所述前驱动腔3的左右边沿上分别设置有左双铰接座21和右双铰接座22,左双铰接座21与后二级摇杆19和前一级摇杆15分别铰接,右双铰接座22与前二级摇杆20和后一级摇杆14分别铰接。
75.两级单曲柄摇杆机构的设计:
76.如图13所示,单曲柄双摇杆机构是目前研究制作微型扑翼飞行器普遍采用的一种驱动机构,它是最简单的一种单自由度扑翼运动实现形式;该机构具有重量轻、体积小和容易微型化等优点,但单曲柄双摇杆机构左右两侧机翼不具有对称性,扑翼在作上下扑动过程中,两侧运动会存在扑动角度相位差,会导致左右机翼瞬时升力不相同,对飞行器稳定性造成影响。
77.因此可以考虑改变机构构型,增加一个曲柄转化为双曲柄双摇杆机构,其机构示意图如图14所示,左右两曲柄相对于机身纵骨架对称,则摇杆的摆动也具有对称性,但是双曲柄双摇杆机构缺点是微型化困难。
78.基于此基础上,本技术创造性的使用两级单曲柄摇杆机构,通过同一驱动轴驱动,即蜻蜓的前后扑翼分别由不同单曲柄摇杆机构传动,同轴放置,轴线为蜻蜓机身的纵轴线,连接于同一驱动轴上,且前后扑翼的左、右两扑翼都分别与一滑块相连,使之不仅能上下摆动,而且还能相对摇杆轴线方向运动,最后将前翼与后翼用两根轴相连。
79.这样既解决了平面单曲柄双摇杆机构机扑翼不对称性的问题,还保证了前后扑翼运动的同步,更避免了平面双曲柄双摇杆机构微型化困难的缺点,且符合蜻蜓扑翼运动规律。
80.本文设计的仿蜻蜓扑翼飞行器的前翼传动机构示意图如图15所示,驱动轴与曲柄固连,带动曲柄ab在平面内绕x轴作圆周运动,曲柄ab与连杆bc铰接,左右两摇杆对称布置,摇杆cd和cd1分别与摆块2、3形成移动副,使摆块与固定在机架上旋转轴产生相对旋转运动。
81.前后扑翼驱动机构相同,利用一个共同驱动轴将动力源同时传递至前后扑翼,前扑翼与后扑翼以45
°
相位差进行上下拍动,前后扑翼的左右两翼采取对称布置。
82.其中,所述扑翼的翅脉采用内稀外密结构,扑翼的翅脉脉络截面形状为椭圆形,扑翼的翅膜采用内厚外薄结构。
83.翅脉结构设计:
84.蜻蜓翅由翅膜和翅脉组成;蜻蜓翅的翅脉由纵脉和横脉构成,其中,纵脉从翅根部向翅尖延展,构成了蜻蜓翅的主体框架,从而抵抗翅在扑翼过程中的弯矩和扭矩,纵脉具有较好的稳定性和承载能力;横脉在翅中充当加强元件,为纵脉提供横向支撑,使蜻蜓翅具有弦向柔韧性,蜻蜓纵脉与横脉构成了多个不同形状的翅室,其排布具有一定的规律性,能够承受在飞行过程中的多种载荷。
85.靠近翅前缘的翅室多呈矩形排布,靠近翅后缘的翅室多呈五边形或六边形,这种排列规律保证了蜻蜓翅在承受载荷时的稳定性及抗撕裂能力。
86.因此,本技术的扑翼越靠近翅翼根部,脉络分布越稀疏,越远离翅翼根部,脉络分布越密集。
87.蜻蜒翅脉和翅膜的厚度也不是均匀的尺寸,其变化具有一定的规律性:越靠近翅根部,翅脉和翅膜越厚;靠近翅尖部位时,翅脉和翅膜厚度变小,翅脉和翅膜厚度从翅根部位到翅尖呈逐渐减小的趋势,这种特性使蜻蜓翅在飞行中能更有效地承受多种载荷,从而提高飞行的稳定性。
88.脉络结构设计:
89.从工程设计角度考虑,在希望设计出既轻便、刚度又强的翅翼,又不考虑加工难度和成本时,脉络截面形状将做成椭圆形。截面形状作为脉络的显著特质之一,其研究对于提高翅翼机械强度十分有必要。
90.尽管蜻蜓经过数亿万年的进化,其翅翼脉络截面已经具有相对完美的形状,但通过对比数值模拟计算可知,在受端部力时,圆柱形截面的力学特性与葫芦形截面近似,且随着翅翼脉络截面面积值的减少,椭圆形截面力学特性逐渐开始优于葫芦形截面与圆形截面,且在受扭矩的情况下椭圆形截面力学特性明显优于葫芦形与圆形截面,考虑到蜻蜓之所以形成椭圆形脉络,跟其脉络形成时的先后顺序有关,因此,本技术的翅翼脉络截面形状设计为椭圆形。
91.其中,所述前扑翼和后扑翼的相位差为45
°
,扑动幅度值为35
°
。
92.飞行参数设计
93.蜻蜓模型参数如下:扑翼翅长为bf=102.2mm,平均弦长=33.4mm,翅翼面积为3413.48mm2。
94.蜻蜓的二维运动模型如图16-17所示,蜻蜓的运动可简化为扑动平面绕翅根的扑动以及绕转动轴的转动,其中u
∞
表示前飞时等效来流速度,来流沿y轴负方向。
95.图17中两条虚线分别为前后翅扑动平面,扑动平面与水平面交角为β,设定β=52
°
,αu为翅膀上扑时与扑动平面的夹角,αd为翅膀下扑时与扑动平面的夹角;翅膀的转动发生于翅膀扑动即将结束阶段,其余时间翅膀攻角保持不变。
96.翅膀rf的扑动方程可以描述为:
97.式中为瞬时扑动角,φ为扑动幅值,w为扑动角速度(rad/s),w=2πn,n为扑动频率。
98.翅膀rh的扑动方程可以描述为:
99.式中ψ为后翅领先前翅相位角。
100.扑动采用对称扑动模式,即一次转动中有一半时间处于下扑,一半处于上扑过程;其余三个翅的转动和扑动参数均相同,此处不再给出。
101.蜻蜓飞行时扑动频范围在20-50hz之间,其中主要集中于20-40hz,为研究蜻蜓在不同扑动频率下气动特性随相位差变化规律是否相同,选择扑动频率n=20、30、40hz。
102.上述频率对应雷诺数在880-1760之间,而现阶段大多数微型飞行器扑动雷诺数在500-10000之间,根据动态缩放定理可知,雷诺数与前进比相同即具有相同的气动特性,为使计算结果能指导飞行器设计,选择100hz和200hz两种扑动频率。
103.飞行参数
[0104][0105]
通过计算发现扑动幅值在34.5
°
左右效率最高,因此选择扑动幅值φ=35
°
,翅膀旋转周期δτ=0.390τc,下扑时翅膀翻转时间为τd=0.305τc,上扑时翅膀翻转时间为τu=0.805τc。上扑和下扑攻角分别为αd=52
°
,αu=8
°
。扑动平面角在悬停和前飞时均为β=52
°
。
[0106]
扑翼前后翅相位差设计
[0107]
蜻蜓前后翼的扑动和相位关系极为独特,主要有3种基本的方式,这三种方式的扑动角随时间变化如18-20图所示:反相扑动(如图18所示)、定相扑动(如图19所示)、同相扑动(如图20所示)。
[0108]
为研究蜻蜓前后翅相位差对气动特性影响,需要对关键扑翼流场特征参数和扑翼气动特征参数进行无量纲化,关键的几个特征参数定义如下。取前翼rf平均弦长为特征长度c,参考速度u为悬停时前翼2/3展长处的扑动速度,参考速度定义为:u=4φnr
[0109]
式中,r为前翅翼长的2/3m。
[0110]
雷诺数re用来表征流体的惯性力和粘性力的相对大小,其定义如下:
[0111]
re=ρuc/μ
[0112]
式中,ρ为空气密度(kg/m3),μ为空气动力粘度(n
·
s/m2)。
[0113]
表征模型前飞速度大小的物理量前进比j定义为:
[0114]
j=u∞/4φnbf[0115]
翼翅模型飞行过程中,每个翅膀瞬时气动力在坐标轴上的分量定义为:fh为水平方向瞬时力,ch水平方向上的力系数,fv为竖直方向瞬时力,cv为竖直方向上的力系数。
[0116]
cv=2fv/ρu2(sf+sh)
[0117]ch
=2fh/ρu2(sf+sh)
[0118]
式中,sf、sh分别为前翅、后翅的面积。
[0119]
每个翅翼的瞬时功率p(t)定义为:
[0120][0121]
式中,m1(t)、m2(t)分别为扑动、转动所需力矩,α(t)分别为扑动、转动角速度。
[0122]
气动功率系数定义为:cp=p/[0.5ρu3(sf+sh)]
[0123]
气动效率定义为:η=fv/p=√(cv2+ch2/cp)
[0124]
根据上式,得到气动力随相位差变化曲线如21、22所示(图21为升力系数随相位差变化曲线,图22为推力系数随相位差变化曲线)。
[0125]
由图可得,在所有前进比下升力随相位差变化总体呈现凹形曲线,在相位差为0-45
°
之间升力达到最大,在90-315
°
之间保持相对稳定的状态,表明前后翅之间的干扰不利于升力的产生,推力在j=0和0.15时随相位差波动较大,随着前进比增大,推力随相位差波动较小,且推力随着来流增加呈现减小趋势,推力在0-90
°
之间升力达到最大,在180-270
°
之间推力最小,因此,为保证飞行器飞行时的升力,我们将前后两翅的相位差设定为45
°
。
[0126]
其中,所述蜻蜓机体1的眼部安装有微型摄像装置,微型摄像装置与主板8连接。
[0127]
使用时,在蜻蜓机体的眼部安装微型摄像机或者照相机,对各地水质情况拍照,并将影响信息发至主板上,由主板将照片传送给后台,供研究人员分析,从而实现对水环境的保护。
[0128]
工作原理
[0129]
滑动拨动开关
‑‑‑
电机带动靠近一级曲柄转动,后扑翼扑动
‑‑‑
驱动轴将动力传递给二级曲柄,二级曲柄带动前扑翼扑动
‑‑‑
待翅膀扑动平稳后,手持本飞行器(本仿生蜻蜓机器人)向前扔出,提供初始动力
‑‑‑
本飞行器正常飞行。
[0130]
本技术采用两级单曲柄摇杆机构,既解决了平面单曲柄双摇杆机构机翼不对称性的问题,还保证了前后翼运动的同步,更避免了平面双曲柄双摇杆机构微型化困难的缺点,符合仿蜻蜓运动规律,为构建扑翼飞行器传动机构提供了一套合理的方案。
[0131]
本技术设计的扑翼飞行器采用电机驱动方式,整个驱动机构的形式与蜻蜓的胸腔式结构基本相同,扑翼飞行器机构采用柔性铰链聚酰亚胺连接,其具有不易变形、阻燃性高和稳定性好等特点,弹性模量小,极大减小了扑翼飞行器飞行时的运动阻力。
[0132]
尽管通过参考附图并结合优选实施例的方式对本发明进行了详细描述,但本发明
并不限于此,在不脱离本发明的精神和实质的前提下,本领域普通技术人员可以对本发明的实施例进行各种等效的修改或替换,而这些修改或替换都应在本发明的涵盖范围内/任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1