一种地理信息测绘用具有保护功能的无人机测绘设备的制作方法
1.本发明涉及无人机测绘技术领域,尤其涉及一种地理信息测绘用具有保护功能的无人机测绘设备。
背景技术:
2.由于地理环境的复杂,不便于携带仪器进行实地测绘,从而产生无人机与测绘仪相结合的测绘方式,来对所测区域的地理信息进行扫描测绘。
3.若无人机工作过程中发生故障,不易使无人机平稳降落,导致无人机降落时产生较大冲击力,引起无人机震动,而无人机震动易导致无人机上携带的测绘仪器发生震动,导致其损坏,影响测绘仪器后续正常工作,若无人机故障严重发生坠毁时,测绘仪器和无人机一同坠落,导致测绘仪器受撞击发生损毁,致使测绘数据丢失,同时造成不必要的经济损失。
4.因此针对这一现状,我们需要开发一种地理信息测绘用具有保护功能和缓冲功能的无人机测绘设备,以满足实际使用的需要。
技术实现要素:
5.本发明的目的之一在于针对上述不足,提供一种地理信息测绘用具有保护功能和缓冲功能的无人机测绘设备,以期望解决现有技术中无人机发生故障,易导致测绘仪器受损,致使测绘数据丢失,同时造成不必要的经济损失的问题。
6.为解决上述的技术问题,本发明采用以下技术方案:一种地理信息测绘用具有保护功能的无人机测绘设备,包括有无人机,无人机的下端安装有支撑架,支撑架上设有凹槽,支撑架的凹槽内开设有滑槽,支撑架的下部设有用于固定测绘设备的固定机构,固定机构上设有用于缓冲保护测绘设备的测绘保护机构,固定机构的下端设有缓冲机构和锁止机构,缓冲机构用于缓冲无人机下落冲击力,锁止机构用于限制缓冲机构的摆动,固定机构弹出测绘保护机构,使空气进入测绘保护机构并触发其工作,用于减速测绘保护机构坠落,固定机构和测绘保护机构之间信号连接。
7.更为优选的是,固定机构包括有滑动板,滑动板滑动设置在支撑架的凹槽内,滑动板和支撑架之间固接有第一弹簧,支撑架上固接有两个第一固定块,两个第一固定块内分别滑动设置有t形滑动杆,两个t形滑动杆分别和相邻第一固定块之间固接有两个拉簧,两个第一固定块的外端分别固接有电动推杆,两个电动推杆分别与两个t形滑动杆接触配合。
8.更为优选的是,测绘保护机构包括有第一固定壳,第一固定壳上设有用于安装定位的凸起,第一固定壳的上端设为锥台形,第一固定壳上开设有两个圆柱盲孔,两个t形滑动杆分别与第一固定壳的两个圆柱盲孔配合,用于对第一固定壳进行固定,第一固定壳滑动安装在支撑架的凹槽内,第一固定壳的凸起与支撑架上凹槽内的滑槽配合,第一固定壳内设有腔室,且第一固定壳的腔室内充满液压油,第一固定壳上腔室的上下两端分别固接有固定套,每个固定套上都滑动设置有滑动壳,两个滑动壳的内端均设为锥台形,每个滑动
壳和第一固定壳之间都固接有第二弹簧,两个滑动壳之间安装有保护壳,保护壳内设有智能终端,智能终端与电动推杆信号连接,保护壳的侧壁上安装有橡胶环,橡胶环用于增大保护壳与液压油的接触面积,保护壳和第一固定壳之间安装有保护管,保护管的前部穿透第一固定壳并与其固接,保护管的中部设置为软管,用于适应保护壳的活动,保护管的前部固接有摄像头,摄像头和智能终端电气连接,第一固定壳的下端设有用于降低其坠落速度的减速组件。
9.更为优选的是,第一固定壳上开设有环形凹槽,用于增加第一固定壳与空气的接触面积。
10.更为优选的是,减速组件包括有倾斜壳,倾斜壳固接在第一固定壳的下端,第一固定壳的下端固接有第二固定块,第二固定块上固接有第一固定环,第一固定壳上开设有圆柱孔,第二固定块上开设有凹槽,第二固定块的凹槽和圆柱孔连通,圆柱孔内安装有折叠布。
11.更为优选的是,缓冲机构包括有摆动杆,摆动杆球接在第二固定块上,摆动杆的下部滑动设置有滑动块,摆动杆上固接有第一固定板,第一固定板和滑动块之间固接有若干个第三弹簧,第一固定板的下端固接有四个固定柱,每个固定柱的下端都设有圆柱磁铁,滑动块内固接有四个第二固定壳,四个固定柱的圆柱磁铁分别滑动于四个第二固定壳内,每个第二固定壳内都开设有腔室,每个第二固定壳的腔室内都安装有铜线圈,滑动块内设有用于摆正无人机的摆正组件。
12.更为优选的是,滑动块的侧壁上设有矩形板,用于增加滑动块与空气的接触面积。
13.更为优选的是,摆正组件包括有第一滑动杆,第一滑动杆设置有四个,四个第一滑动杆滑动设置在滑动块上,四个第一滑动杆的下端固接有第二固定板,四个第一滑动杆均穿透第一固定板并与其滑动连接,四个第一滑动杆的上端固接有第二固定环,第二固定环和第一固定环接触配合,用于摆动杆和第二固定块之间保持竖直。
14.更为优选的是,锁止机构包括有第二滑动杆,第二滑动杆滑动设置在第一固定壳上,第一固定壳上开设有竖直盲孔,倾斜壳上固接有固定框,固定框上转动设置有转轴,转轴上固接有直齿轮,直齿轮位于固定框内,转轴和固定框之间固接有扭簧,扭簧套在转轴上,固定框内滑动设置有两个齿条,两个齿条均与直齿轮啮合,后侧的齿条与第二滑动杆的下端固接,前侧的齿条下端固接有第三固定环,第三固定环的前端固接有导向杆,导向杆滑动于第一固定壳的竖直盲孔内。
15.更为优选的是,还包括有清理机构,滑动板上设有用于清理摄像头的清理机构,清理机构包括有第三固定壳,第三固定壳设置有两个,两个第三固定壳分别通过连接块固接在滑动板的下端,两个第三固定壳的内端均设为棱台形孔,棱台形孔用于增加空气的流速,两个棱台形孔交错设置在摄像头的两侧,每个第三固定壳内都通过电机安装有风扇,两个电机均与保护壳内的智能终端电气连接,每个第三固定壳的内下部都固接有螺纹板和若干个倾斜板,若干个倾斜板位于螺纹板的后部,且若干个倾斜板设置为交错状,用于阻挡过滤空气中的杂物,每个螺纹板的中部都固接有第四固定壳,第四固定壳上开设有若干个孔洞,且第四固定壳内装有干燥剂,螺纹板用于延长空气在第四固定壳处的流动路径。
16.与现有技术相比,本发明所达到的技术效果是:本发明通过固定机构中的实现对第一固定壳的快速固定,便于摄像头跟随无人机飞行对所测区域进行扫描记录,测绘保护
机构中的第二弹簧和液压油对保护壳进行缓冲保护,实现对保护壳内智能终端的保护,避免智能终端碰撞损坏导致数据丢失,减速组件中的折叠布打开,对第一固定壳的坠落进行减速,实现对智能终端的进一步保护,缓冲机构中第二固定板的下表面始终与地面平行,便于无人机故障倾斜时,平稳进行降落,且受第三弹簧作用,对无人机的降落冲击力进行缓冲,而固定柱的圆柱磁体在铜线圈内移动产生磁力阻力,减缓第三弹簧的反弹频率,实现智能终端的快速静止,摆正组件中的第二固定环移动与第一固定环紧密贴合,实现倾斜无人机降落时的摆正,避免无人机倾斜降落时损坏,锁止机构使弹出后第一固定壳与滑动块之间保持竖直,便于第一固定壳坠落时,滑动块先接触地面进行缓冲,清理机构中两个第三固定壳在摄像头表面交错喷气,避免摄像头表面产生污渍与水汽,影响测绘效果。
附图说明
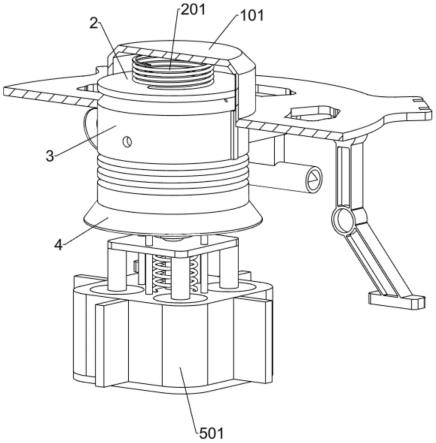
17.图1为本发明的立体结构示意图。
18.图2为本发明支撑架的剖视图。
19.图3为本发明的局部剖视图。
20.图4为本发明测绘保护机构的剖视图。
21.图5为本发明减速组件的剖视图。
22.图6为本发明缓冲机构的局部剖视图。
23.图7为本发明锁止机构的局部剖视图。
24.图8为本发明固定框的立体结构示意图。
25.图9为本发明清理机构的局部剖视图。
26.附图中的标记:1-无人机,101-支撑架,2-滑动板,201-第一弹簧,202-第一固定块,203-t形滑动杆,204-拉簧,205-电动推杆,3-第一固定壳,301-固定套,302-滑动壳,303-第二弹簧,304-保护壳,305-橡胶环,306-保护管,307-摄像头,4-倾斜壳,401-第二固定块,402-第一固定环,403-圆柱孔,404-折叠布,5-摆动杆,501-滑动块,502-第一固定板,503-第三弹簧,504-固定柱,505-第二固定壳,506-铜线圈,6-第一滑动杆,601-第二固定板,602-第二固定环,7-第二滑动杆,701-固定框,702-转轴,703-直齿轮,704-扭簧,705-齿条,706-第三固定环,707-导向杆,8-第三固定壳,801-风扇,802-螺纹板,804-第四固定壳,803-倾斜板。
具体实施方式
27.为了更清楚地说明本公开实施例的技术方案,下面将对实施例的附图作简单地介绍,显而易见地,下面描述中的附图仅仅涉及本公开的一些实施例,而非对本公开的限制。
28.实施例1
29.一种地理信息测绘用具有保护功能的无人机测绘设备,参照图1-图9所示,包括有无人机1,无人机1的下端螺栓连接有支撑架101,支撑架101的中部设有凹槽,支撑架101的凹槽内开设有用于定位的滑槽,支撑架101的下部设有用于固定测绘设备的固定机构,同时便于测绘设备弹出,后续对测绘设备进行保护,固定机构上设有用于缓冲保护测绘设备的测绘保护机构,同时便于无人机故障倾斜时,进行平稳降落,固定机构的下端设有缓冲机构和锁止机构,缓冲机构用于缓冲无人机1下落冲击力,锁止机构用于限制缓冲机构的摆动,
固定机构弹出测绘保护机构,将测绘设备与无人机进行分离,单独对测绘设备进行缓冲保护,使空气进入测绘保护机构并触发其工作,用于减速测绘保护机构坠落,避免测绘设备受冲击发生损坏,固定机构和测绘保护机构之间信号连接。
30.使用者将测绘保护机构向支撑架101内进行安装,固定机构对测绘保护机构进行限位固定,同时固定机构挤压锁止机构,使锁止机构解除对缓冲机构的限位,此时无人机1和测绘保护机构均通过物联网与控制器信号连接,然后使用者手持控制器启动无人机1并控制其进行相应飞行,使测绘保护机构对所测区域的地理进行扫描测绘,测绘完毕后,使用者手持控制器使无人机1降落,无人机1在降落过程中缓冲机构工作,对无人机1的降落进行缓冲,对测绘保护机构和无人机1进行保护,使无人机1平稳降落在地面上。
31.当无人机1的部分螺旋桨发生故障损坏时,无人机1飞行不稳定发生相应倾斜,此时使用者需及时通过控制器使无人机1降落,而随着无人机1的倾斜缓冲机构始终保持竖直,即缓冲机构的下底面始终与地面平行,随后无人机1降落,缓冲机构平稳与地面接触,接着无人机1继续降落,其中缓冲机构对测绘保护机构、固定机构、支撑架101和无人机1进行扶正,同时缓冲机构对无人机1的降落进行缓冲。
32.当无人机1故障无法正常工作时,无人机1坠落,此时使用者通过控制器向保护壳304内的智能终端发生信号,智能终端启动固定机构工作解除对测绘保护机构的固定,同时固定机构将测绘保护机构弹出,测绘保护机构带动与其相连接的零件一同弹出,而测绘保护机构弹出使空气进入其内,并触发测绘保护机构工作,对测绘保护机构的下坠进行减速,同时支撑架101解除对锁止机构的挤压限位,锁止机构工作对缓冲机构进行固定限制,使缓冲机构和测绘保护机构保持竖直,而测绘保护机构在下落过程中与环境中的树木等物体进行碰撞时,测绘保护机构对其内的电气元件进行缓冲保护,避免电气元件损坏造成数据的丢失,造成不必要的经济损失。
33.当弹出的测绘保护机构坠落地面时,缓冲机构先与地面接触,此时缓冲机构对测绘保护机构的坠落进行缓冲,同时测绘保护机构自身工作同理对其内的电气元件进行保护,而受缓冲机构自身作用,在对测绘保护机构进行缓冲保护过程中,缓冲保护机构快速恢复平稳,避免测绘保护机构频繁震动。
34.实施例2
35.在实施例1的基础之上,参照图2和图3所示,固定机构包括有滑动板2,滑动板2滑动连接在支撑架101的凹槽内,滑动板2和支撑架101之间安装有第一弹簧201,受第一弹簧201作用,便于后续对测绘设备进行弹出保护,支撑架101的左右两部分别螺栓连接有第一固定块202,两个第一固定块202内分别滑动连接有t形滑动杆203,两个t形滑动杆203分别和相邻第一固定块202之间安装有两个拉簧204,两个第一固定块202的外端分别安装有电动推杆205,两个电动推杆205分别与两个t形滑动杆203接触配合。
36.参照图3-图5所示,测绘保护机构包括有第一固定壳3,第一固定壳3上设有凸起,第一固定壳3的凸起便于其定位安装在支撑架101上,第一固定壳3的上端设为锥台形,便于第一固定壳3安装过程中挤压t形滑动杆203移动,第一固定壳3的左右两部分别开设有圆柱盲孔,第一固定壳3的侧壁上开设有环形凹槽,用于增加第一固定壳3与空气的接触面积,加快第一固定壳3散热,两个t形滑动杆203的内端分别与第一固定壳3的两个圆柱盲孔配合,用于对第一固定壳3进行固定,将测绘设备进行快速固定,第一固定壳3滑动设置在支撑架
101的凹槽内,第一固定壳3的凸起与支撑架101上凹槽内的滑槽配合,第一固定壳3内设有腔室,且第一固定壳3的腔室内充满液压油,第一固定壳3上腔室的上下两端分别固接有固定套301,每个固定套301上都滑动连接有滑动壳302,两个滑动壳302的内端均设为锥台形,每个滑动壳302和第一固定壳3之间都安装有第二弹簧303,两个滑动壳302之间设置有保护壳304,保护壳304内设有智能终端,受冲击后保护壳304在第一固定壳3内发生相应晃动,此时第二弹簧303发生相应变化使两个滑动壳302始终夹紧保护壳304,此过程中第二弹簧303和滑动壳302对保护壳304的晃动进行缓冲保护,而液压油同时对保护壳304的晃动进行二次缓冲保护,且液压油对保护壳304进行散热,确保智能终端长时间平稳工作,智能终端与电动推杆205信号连接,保护壳304的侧壁上设置有橡胶环305,橡胶环305用于增大保护壳304与液压油的接触面积,且橡胶环305与第一固定壳3的腔室侧壁接触后,同理对保护壳304的过度滑动进行缓冲,保护壳304和第一固定壳3之间固接有保护管306,保护管306的前部穿透第一固定壳3并与其固接,保护管306的中部设置为软管,用于适应保护壳304的活动,保护管306的前部安装有摄像头307,摄像头307和智能终端电气连接,摄像头307扫描地形完成地理信息测绘,第一固定壳3的下端设有用于降低其坠落速度的减速组件。
37.参照图5所示,减速组件包括有倾斜壳4,倾斜壳4焊接在第一固定壳3的下端,第一固定壳3下端的中部通过螺栓连接有第二固定块401,第二固定块401的下部焊接有第一固定环402,第一固定壳3的中部开设有圆柱孔403,第二固定块401的上端开设有凹槽,第二固定块401的凹槽和圆柱孔403连通,圆柱孔403的上部安装有折叠布404,当第一固定壳3弹出后,空气受倾斜壳4作用,通过第二固定块401的凹槽进入圆柱孔403内,将折叠布404吹起,并使折叠布404展开,降低第一固定壳3的坠落速度。
38.参照图5和图6所示,缓冲机构包括有摆动杆5,摆动杆5球接在第二固定块401的下部,摆动杆5的下部滑动连接有滑动块501,滑动块501的侧壁上设有矩形板,用于增加滑动块501与空气的接触面积,同时便于滑动块501下坠过程中,滑动块501保持竖直,避免滑动块501通过相连接的零件使第一固定壳3进行转动与摆动,摆动杆5的上部焊接有第一固定板502,第一固定板502和滑动块501之间安装有四个第三弹簧503,受第三弹簧503作用,对无人机的下落冲击力进行缓冲,第一固定板502的下端焊接有四个固定柱504,每个固定柱504的下端都设有圆柱磁铁,滑动块501内嵌有四个第二固定壳505,四个固定柱504的圆柱磁铁分别滑动于四个第二固定壳505内,每个第二固定壳505内都开设有腔室,每个第二固定壳505的腔室内都安装有铜线圈506,当固定柱504的圆柱磁铁在第二固定壳505内滑动经过铜线圈506时,铜线圈506产生电磁阻尼限制第三弹簧503形变,即降低固定柱504的圆柱磁铁在第二固定壳505内往复滑动的频率,滑动块501内设有用于摆正无人机1的摆正组件。
39.参照图5和图6所示,摆正组件包括有第一滑动杆6,第一滑动杆6设置有四个,四个第一滑动杆6滑动连接在滑动块501上,四个第一滑动杆6的下端通过螺栓连接有第二固定板601,四个第一滑动杆6的上部均穿透第一固定板502并与其滑动连接,四个第一滑动杆6的上端通过螺栓连接有第二固定环602,第二固定环602和第一固定环402接触配合,用于摆动杆5和第二固定块401之间保持竖直,当无人机1故障进行倾斜降落时,随着无人机1的降落,第二固定环602移动挤压第一固定环402,而第一固定环402通过相连接的零件移动,使无人机摆正保持水平,避免无人机再次受到损坏。
40.参照图7和图8所示,锁止机构包括有第二滑动杆7,第二滑动杆7滑动连接在第一
固定壳3的后部,第一固定壳3前部开设有竖直盲孔,倾斜壳4的内后部通过螺栓连接有固定框701,固定框701的前部转动连接有转轴702,转轴702上键连接有直齿轮703,直齿轮703位于固定框701内,转轴702和固定框701之间安装有扭簧704,初始状态下,扭簧704处于扭转状态,即滑动块501和第一固定壳3之间保持竖直固定,扭簧704套在转轴702上,固定框701内滑动连接有两个齿条705,两个齿条705均与直齿轮703啮合,后侧的齿条705与第二滑动杆7的下端焊接,前侧的齿条705下端焊接有第三固定环706,第三固定环706的前端焊接有导向杆707,导向杆707滑动于第一固定壳3的竖直盲孔内,对第三固定环706的上下滑动进行导向,当第一固定壳3安装进入支撑架101的凹槽内时,受第一固定块202的作用,第二滑动杆7移动通过相连接的零件使第三固定环706移动,解除与第一固定板502的接触配合,无人机工作时,若无人机降落发生倾斜,仍能平稳降落,而第一固定壳3弹出后,恢复初始状态进行竖直降落。
41.使用者手持第一固定壳3向支撑架101内进行安装,此时使用者需将第一固定壳3的凸起与支撑架101凹槽内的滑槽正对,将第一固定壳3插入支撑架101凹槽内,而受第一固定壳3的锥台形作用,第一固定壳3在移动过程中,第一固定壳3先挤压两个t形滑动杆203向外移动并拉伸拉簧204,随后第一固定壳3继续移动,使两个t形滑动杆203分别进入第一固定壳3的圆柱盲孔内,实现对第一固定壳3的快速固定,同时第一固定壳3移动挤压第一固定块202并压缩第一弹簧201,且此时无人机1和保护壳304内的智能终端均通过物联网与控制器信号连接。
42.而随着第一固定壳3的安装,第二滑动杆7与第一固定块202接触挤压,使第二滑动杆7带动与其固接的齿条705移动,而后侧的齿条705移动通过直齿轮703和转轴702,带动前侧的齿条705、第三固定环706和导向杆707向上移动,使第三固定环706解除与第一固定板502的接触挤压。
43.然后使用者将安装完毕后的无人机1放置到水平地面上,随后使用者通过控制器启动无人机1,无人机1带动第一固定壳3与其上相连接的零件一同飞行,此过程中摄像头307对所测区域的地理进行扫描测绘,并将所测数据存储在保护壳304内的智能终端中,测绘完毕后,使用者通过控制器控制无人机1降落,无人机1在降落过程中,第二固定板601与地面接触,接着无人机1继续降落,第二固定板601移动与滑动块501接触,同时第二固定板601通过第一滑动杆6带动第二固定环602移动,第二固定环602移动与第一固定环402接触挤压,确保摆动杆5与第二固定块401之间竖直,即无人机1水平降落,此过程中,滑动块501和第二固定壳505与第一固定板502和固定柱504之间发生相应移动压缩第三弹簧503,最终无人机1平稳降落在地面上。
44.当无人机1进行测绘过程中,其上部分螺旋桨发生故障损坏时,无人机1飞行不稳定发生相应倾斜,此时使用者需及时通过控制器使无人机1降落,而随着无人机1的倾斜,受滑动块501的重力作用,滑动块501带动摆动杆5进行相应摆动,使滑动块501的下端面保持水平,即第二固定板601的下端面保持水平。
45.由于无人机1倾斜,同时不易控制,无人机1在贴合接触地面时冲击力较大,同时避免无人机1降落时其上机翼转动与地面接触发生损坏,此时无人机1降落同理进行上述工作,使第二固定环602移动与第一固定环402接触挤压,确保摆动杆5与第二固定块401之间竖直,即使降落后无人机1保持水平,而此时第二固定板601与滑动块501接触后,无人机1继
续降落,此时滑动块501和第二固定壳505与第一固定板502和固定柱504之间发生移动,此过程中第三弹簧503受挤压对无人机1的降落进行缓冲,同时固定柱504的圆柱磁铁在第二固定壳505内移动,即固定柱504的圆柱磁铁移动经过铜线圈506产生电磁阻尼,电磁阻尼对无人机1的降落进行缓冲,双级缓冲完成对无人机1降落的缓冲保护,避免保护壳304内智能终端受冲击发生损坏。
46.当无人机1进行测绘过程中,无人机1故障无法正常工作时,使用者通过控制器向保护壳304内的智能终端发生信号,智能终端启动两个电动推杆205工作,两个电动推杆205工作推动两个t形滑动杆203移动,使两个t形滑动杆203从第一固定壳3的两个圆柱盲孔内脱离,解除对第一固定壳3的固定,随后受第一弹簧201作用,滑动板2推动第一固定壳3和与其相连接的零件一同移动,从支撑架101的凹槽内弹出进行坠落,而第一固定壳3弹出过程中,受倾斜壳4作用,倾斜壳4将覆盖的空气导流至第一固定壳3的圆柱孔403内,空气进入第一固定壳3的圆柱孔403内后吹动折叠布404弹出并伸展开,对第一固定壳3的坠落进行减速。
47.同时第一固定壳3弹出后,将解除对第二滑动杆7的限位挤压,受扭簧704作用,使其进行上述反向工作,即第三固定环706重新与第一固定板502接触,完成对第一固定板502和摆动杆5的限制,即摆动杆5和第二固定块401之间保持竖直,且受折叠布404的减速作用,第一固定壳3和与其相连接的零件移动保持竖直,并竖直向下掉落,此过程中滑动块501侧壁上的矩形板分隔气流,并对其掉落进行导向,避免其自转与整体摆动。
48.且在第一固定壳3下坠过程中,当第一固定壳3与树等物体进行碰撞时,保护壳304在第一固定壳3内进行晃动,受第一固定壳3内液压油的作用,液压油对保护壳304的晃动进行缓冲保护,同时液压油对保护壳304内智能终端进行散热,再受第一固定壳3上环形凹槽的作用,第一固定壳3与空气接触面积增大,此时无人机1飞行对第一固定壳3进行快速散热,确保保护壳304内智能终端长时间正常工作,同时保护壳304在晃动过程中,两个滑动壳302发生相应移动,而受两个第二弹簧303作用,两个滑动壳302始终夹紧保护壳304并对其进行保护,而滑动壳302移动使第二弹簧303发生相应形变,第二弹簧303的形变完成对保护壳304的缓冲保护,即避免保护壳304内的智能终端损坏造成数据的丢失,造成不必要的经济损失。
49.当弹出后的第一固定壳3坠落地面时,同理进行上述工作,此过程中滑动块501和第二固定壳505与第一固定板502和固定柱504之间发生移动,此过程中第三弹簧503受挤压对保护壳304内的智能终端进行缓冲,同时固定柱504的圆柱磁铁在第二固定壳505内移动进过铜线圈506,随后第三弹簧503复位通过摆动杆5、第二固定块401和第一固定壳3进行向上弹起,而此时摆动杆5移动带动固定柱504移动,使其上圆柱磁铁在铜线圈506内移动,且此时固定柱504的圆柱磁铁移动同时产生电磁阻尼,减缓第三弹簧503的弹出距离,使第一固定壳3快速恢复静止,减缓第三弹簧503的反震频率。
50.实施例3
51.在实施例2的基础之上,参照图3和图9所示,还包括有清理机构,滑动板2上设有用于清理摄像头307的清理机构,清理机构包括有第三固定壳8,第三固定壳8设置有两个,两个第三固定壳8分别通过连接块螺栓连接在滑动板2的下端,两个第三固定壳8左右对称,两个第三固定壳8的内端均设为棱台形孔,棱台形孔用于增加空气的喷出速度,两个棱台形孔
交错设置在摄像头307的两侧,空气交错喷射在摄像头307的表面,在摄像头307的表面形成空气保护膜,对摄像头307表面进行保护,每个第三固定壳8内都通过电机固接有风扇801,两个电机均与保护壳304内的智能终端电气连接,智能终端控制电机启动带动风扇801转动,使第三固定壳8内空气快速流动,每个第三固定壳8的内下部都安装有螺纹板802和三个倾斜板803,三个倾斜板803位于螺纹板802的后部,且三个倾斜板803设置为交错状,用于阻挡过滤空气中的飞虫,避免飞虫喷射在摄像头307的表面,使其上产生杂质,影响摄像头307的测绘效果,每个螺纹板802的中部都焊接有第四固定壳804,第四固定壳804的侧壁上开设有若干个孔洞,且第四固定壳804内装有用于吸附空气中水分的干燥剂,螺纹板802用于延长空气在第四固定壳804处的流动路径,充分将空气中的水分吸附,使干燥气体喷射在摄像头307表面进行保护。
52.无人机1启动带动与其相连接的零件一同飞行,同时使用者通过控制器向保护壳304内的智能终端发出信号,受到信号的智能终端启动两个第三固定壳8内的电机,两个电机启动带动两个风扇801进行转动,使两个第三固定壳8内的空气进行流通,受两个第三固定壳8的棱台形孔作用,两个第三固定壳8向摄像头307表面交错喷射空气,而由于三个倾斜板803设置为交错状,空气流动经过第三固定壳8内的倾斜板803时,倾斜板803对空气中的飞虫进行拦截,避免飞虫喷射在摄像头307表面,造成摄像头307表面出现脏污,影响摄像头307的测绘效果。
53.而经过倾斜板803的空气通过第四固定壳804、螺纹板802和第三固定壳8之间,而第四固定壳804内的干燥剂对空气中的水分进行吸附,避免空气喷射在摄像头307表面产生水雾,影响摄像头307的扫描测绘效果,同时螺纹板802的设置,延长空气与第四固定壳804内的干燥剂接触时间,充分去除空气中的水分,提高摄像头307扫描测绘的工作稳定性。
54.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1