一种无人机的挂载固定装置的制作方法
1.本发明涉及无人机技术领域,具体为一种无人机的挂载固定装置。
背景技术:
2.无人机一种无线电遥控设备,在农业中,常通过无人机挂载药筒等,对农作物进行喷洒农药作业,在电力行业或高空摄像作业中,一般通过在无人机底部挂载摄像机,对电网进行巡检,通过无人机的使用,可以提高作业效率,并降低人工操作的风险。
3.在无人机挂载摄像机进行摄像时,无人机的挂载装置需要控制摄像机进行偏转,调整摄像头的角度,利用固定座固定在无人机底部,转动座与摄像机固定,通过固定座和转动座相对转动,来调整摄像头的角度,由于摄像机的重量施加在转动座上,使得转动座和固定座之间的压力较大,在转动时,会产生较大的摩擦,容易在转动过程中,产生卡顿,影响摄像机的角度调节效果,进而影响摄像效果。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种无人机的挂载固定装置,具备固定座和转动座摩擦小、方便调节摄像机角度等优点,解决了摄像机重量施加在转动座上,使固定座和转动座摩擦较大,调节摄像机角度时易卡顿的问题。
6.(二)技术方案
7.为实现上述固定座和转动座摩擦小、方便调节摄像机角度的目的,本发明提供如下技术方案:一种无人机的挂载固定装置,包括无人机本体,所述无人机本体的机架前后侧均可拆卸安装有n形架,两个所述n形架均向相背一侧的下部倾斜,两个所述n形架的中部之间固定安装有支撑框,所述n形架的两个支腿下侧均设置有固定条,所述固定条的端部和n形架的端部之间固定安装有橡胶套,所述橡胶套的内部设置有弹簧,所述弹簧固定安装在固定条和n形架之间,所述固定条的另一端固定安装有固定环,所述固定环内嵌接有固定座,所述固定座的底部转动连接有转动座,所述转动座的后侧插接有l形板,所述转动座的后侧中部贯穿开设有与l形板相适配的插槽,所述l形板的底端前侧转动连接有u形架,所述u形架的两端之间转动连接有摄像机本体;所述固定座的内部设置有驱动部件,所述驱动部件贯穿固定座的底部并与转动座固定安装,所述驱动部件的表面套设有支撑部件,所述支撑部件的下侧依次设置有降低摩擦部件和限位部件,所述降低摩擦部件与驱动部件固定安装,所述限位部件向上移动至降低摩擦部件底部时,与降低摩擦部件相互卡接。
8.优选的,所述驱动部件包括沿着驱动部件轴线设置的驱动轴,所述驱动轴与驱动部件转动连接,所述驱动轴贯穿驱动部件的底部并固定安装在转动座的顶部,所述驱动轴的顶端固定安装有转盘,所述转盘的顶部固定安装有环形齿轮一,所述环形齿轮一的卡齿位于其顶部,所述环形齿轮一的顶部啮合连接有齿轮一,所述齿轮一的中心处固定安装有马达一,所述马达一固定安装在驱动部件的顶壁上,所述转盘的底部阵列设置有磁铁一,所
述驱动轴的表面阵列设置有插板。
9.优选的,所述支撑部件包括有套设在驱动轴和插板装配体外侧的轴承外环,所述轴承外环的外壁和固定座内壁之间固定安装有固定板,所述轴承外环的内部插接有轴承内环,所述轴承内环的顶部设置有圆形凸缘,所述环形凸缘抵接在轴承外环的顶部,所述轴承外环的内壁阵列开设有弧形槽,所述弧形槽的内部设置有转柱,所述转柱抵接在轴承内环的外壁,所述轴承内环的顶部阵列开设有连通至其内壁的插槽,所述插板插接在插槽内,所述轴承外环的底部固定安装有环形板,所述环形板抵接在轴承内环的底部,所述环形板的顶部阵列设置有导向柱,所述转柱的底部开设有与导向柱相适配的圆形槽,所述转柱套设在导向柱的顶部转动。
10.优选的,所述降低摩擦部件包括有设置在轴承外环下方的固定盘,所述固定盘固定安装在驱动轴的表面,所述固定盘的顶部阵列贯穿开设有安装槽,所述安装槽的内部转动连接有磁铁二,所述固定盘的底部且位于安装槽的左右两侧均固定安装有红外发射器,所述固定盘的底部阵列开设有卡槽。
11.优选的,所述限位部件包括有设置在固定盘下方的套环,所述套环套设在驱动轴的外侧,所述套环的顶部阵列设置有与卡槽相适配的卡块,所述套环的顶部阵列设置有三角块,所述套环的顶部且位于三角块的左右两侧均固定安装有红外传感器,所述套环的外壁上固定安装有环形齿轮二,所述环形齿轮二啮合连接有齿轮二,所述齿轮二的中心处固定安装有马达二,所述马达二固定安装在固定座的内壁上,所述套环的底部转动连接有支撑环,所述支撑环的底部和固定座的底壁之间固定安装有电动推杆。
12.优选的,所述转柱由磁性材料制成,所述转柱位于磁铁一的正下方,所述转柱位于磁铁二的正上方,所述转柱与磁铁一相对一端极性相同,所述转柱与磁铁二相对一端极性相反。
13.优选的,所述磁铁二位于安装槽的中部且沿着安装槽的宽度方向设置,所述磁铁二的两侧和安装槽的侧壁之间均设置有转轴,所述转轴沿着安装槽的宽度方向设置,所述转轴上套设有盘簧,所述盘簧内侧一端固定安装在该转轴的表面,所述盘簧的另一端固定安装在安装槽的内壁上。
14.优选的,所述三角块底部的长度小于安装槽的长度,且大于磁铁二侧面与安装槽侧壁之间的宽度。
15.优选的,所述套环和支撑环相对一侧均开设有环形槽,所述环形槽的横截面呈弧形,所述套环和支撑环之间阵列设置有滚珠,所述滚珠设置在两个环形槽之间。
16.优选的,所述无人机本体的内部设置有控制器,所述控制器内部设置有控制芯片,所述马达一、红外发射器、红外传感器、马达二和电动推杆均与该控制器信号连接,所述控制器信号连接有手机终端,所述手机终端内设置有app。
17.(三)有益效果
18.与现有技术相比,本发明提供了一种无人机的挂载固定装置,具备以下有益效果:
19.该无人机的挂载固定装置,通过手机终端内app向无人机本体内的控制器发送指令,驱动马达二转动,带动齿轮二转动,带动套环逆时针转动,当三角块左侧的红外传感器移动至安装槽左侧的三角块正下方时,红外传感器接收红外光,并将信号传递至控制器,通过控制器控制马达二停止,从而使三角块保持在磁铁二的左侧;再通过控制器控制电动推
杆的输出轴伸长,推动支撑环和套环装配体上移,同时三角块插接在安装槽内部,挤压在磁铁二左侧的下半部,从而带动磁铁二上半部向左侧偏转,进而使磁铁二的顶端和转柱之间的吸引力呈倾斜状;该倾斜的吸引力与固定盘顺时针转动时的线速度夹角为锐角,从而提供一个驱动固定盘转动的辅助力,降低驱动驱动轴和固定盘转动的驱动力的大小;另外,通过磁铁二和转柱之间的吸引力对固定盘和磁铁二装配体施加一个向上的拉力,用于抵抗摄像机本体的重力。再配合磁铁一与转柱之间的排斥力,对磁铁一和转盘的装配体施加一个向上的支撑力,进而降低插板对轴承内环位于插槽底壁处的压力,降低轴承内环与轴承外环、转柱之间的摩擦力。从而达到固定座和转动座相对转动时,降低轴承内环与轴承外环、转柱之间摩擦力的效果,同时降低驱动轴转动时的所需的驱动力,保障固定座和转动座转动时更加方便,进而保障摄像机本体调整角度时更顺滑。
附图说明
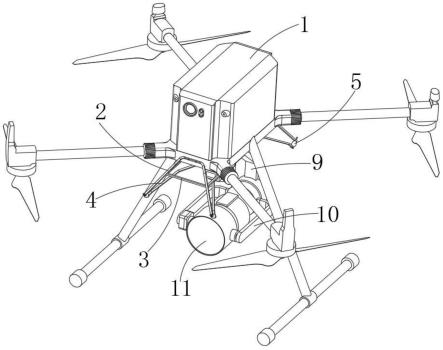
20.图1为本发明提出的一种无人机的挂载固定装置的立体结构示意图;
21.图2为本发明提出的一种无人机的挂载固定装置的去除无人机本体后的立体结构示意图;
22.图3为本发明提出的一种无人机的挂载固定装置的图2中a处细节放大结构示意图;
23.图4为本发明提出的一种无人机的挂载固定装置的固定座和转动座的立体剖切结构示意图;
24.图5为本发明提出的一种无人机的挂载固定装置的固定座内部立体结构示意图;
25.图6为本发明提出的一种无人机的挂载固定装置的驱动部件处立体结构示意图;
26.图7为本发明提出的一种无人机的挂载固定装置的支撑部件处立体爆炸结构示意图;
27.图8为本发明提出的一种无人机的挂载固定装置的限位部件处立体爆炸结构示意图。
28.图中:1、无人机本体;2、n形架;3、支撑框;4、固定条;5、橡胶套;6、固定环;7、固定座;8、转动座;9、l形板;10、u形架;11、摄像机本体;
29.71、驱动部件;72、支撑部件;73、降低摩擦部件;74、限位部件;
30.711、驱动轴;712、转盘;713、环形齿轮一;714、齿轮一;715、马达一;716、磁铁一;717、插板;
31.721、轴承外环;722、固定板;723、轴承内环;724、弧形槽;725、转柱;726、插槽;727、环形板;728、导向柱;
32.731、固定盘;732、安装槽;733、磁铁二;734、红外发射器;735、卡槽;
33.741、套环;742、卡块;743、三角块;744、红外传感器;745、环形齿轮二;746、齿轮二;747、马达二;748、支撑环;749、电动推杆。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.请参阅图1-2,一种无人机的挂载固定装置,包括无人机本体1,无人机本体1的机架前后侧均可拆卸安装有n形架2,n形架2通过螺丝钉固定在无人机本体1的表面。两个n形架2均向相背一侧的下部倾斜,两个n形架2的中部之间固定安装有支撑框3,通过支撑框3加强n形架2的结构强度。
36.n形架2的两个支腿下侧均设置有固定条4,固定条4与n形架2保持平行。固定条4的端部和n形架2的端部之间固定安装有橡胶套5,橡胶套5的内部设置有弹簧,弹簧固定安装在固定条4和n形架2之间,通过弹簧和橡胶套5的设置,在无人机本体1起飞和降落时,使n形架2和固定条4之间产生的振动进行缓冲。
37.请参阅图2-3,固定条4的另一端固定安装有固定环6,固定环6内嵌接有固定座7,固定环6的顶部阵列开设有倒z字形的卡槽,固定座7的表面对应设置有卡柱,从而通过卡槽和卡柱配合,将固定座7嵌接在固定环6的内部。
38.请参阅图2和图4,固定座7的底部转动连接有转动座8,转动座8的后侧插接有l形板9,转动座8的后侧中部贯穿开设有与l形板9相适配的插槽,l形板9的底端前侧转动连接有u形架10,u形架10的两端之间转动连接有摄像机本体11。
39.固定座7的内部设置有驱动部件71,驱动部件71贯穿固定座7的底部并与转动座8固定安装,驱动部件71的表面套设有支撑部件72,支撑部件72的下侧依次设置有降低摩擦部件73和限位部件74,降低摩擦部件73与驱动部件71固定安装,限位部件74向上移动至降低摩擦部件73底部时,与降低摩擦部件73相互卡接。
40.请参阅图5-6,驱动部件71包括沿着驱动部件71轴线设置的驱动轴711,驱动轴711与驱动部件71转动连接,驱动轴711贯穿驱动部件71的底部并固定安装在转动座8的顶部,驱动轴711的顶端固定安装有转盘712,转盘712的顶部固定安装有环形齿轮一713,环形齿轮一713的卡齿位于其顶部,环形齿轮一713的顶部啮合连接有齿轮一714,齿轮一714的中心处固定安装有马达一715,马达一715固定安装在驱动部件71的顶壁上,通过马达一715带动齿轮一714转动,从而带动环形齿轮一713转动,再配合转盘712和驱动轴711的连接作用,带动转动座8转动,调整摄像机本体11的角度。转盘712的底部阵列设置有磁铁一716,驱动轴711的表面阵列设置有插板717。
41.请参阅图5-7,支撑部件72包括有套设在驱动轴711和插板717装配体外侧的轴承外环721,轴承外环721的外壁和固定座7内壁之间固定安装有固定板722,轴承外环721的内部插接有轴承内环723,轴承内环723的顶部设置有圆形凸缘,环形凸缘抵接在轴承外环721的顶部,轴承外环721的内壁阵列开设有弧形槽724,弧形槽724的内部设置有转柱725,转柱725抵接在轴承内环723的外壁,通过弧形槽724和轴承内环723配合,对转柱725的位置进行限制,当轴承内环723转动时,转柱725在轴承内环723的摩擦作用下,仅可在弧形槽724的内部转动。转柱725由磁性材料制成,转柱725位于磁铁一716的正下方,转柱725与磁铁一716相对一端极性相同,从而磁铁一716和转柱725之间存在排斥力,由于固定板722固定在固定座7的内壁上,使磁铁一716受到向上的推力,再配合转盘712、驱动轴711的连接作用,对转动座8施加向上的力,抵抗摄像机本体11的重量。
42.请参阅图5-7,轴承内环723的顶部阵列开设有连通至其内壁的插槽726,插板717
插接在插槽726内,常态下,插板717抵接在插槽726的底壁上,通过轴承内环723对插板717和驱动轴711的装配体进行承载,并且插板717可沿着插槽726向上小距离移动,在驱动轴711转动时,通过插板717带动轴承内环723转动。轴承外环721的底部固定安装有环形板727,环形板727抵接在轴承内环723的底部,环形板727的顶部阵列设置有导向柱728,转柱725的底部开设有与导向柱728相适配的圆形槽,转柱725套设在导向柱728的顶部转动。
43.请参阅图5-6,降低摩擦部件73包括有设置在轴承外环721下方的固定盘731,固定盘731固定安装在驱动轴711的表面,固定盘731的顶部阵列贯穿开设有安装槽732,安装槽732的内部转动连接有磁铁二733,转柱725位于磁铁二733的正上方,转柱725与磁铁二733相对一端极性相反。从而转柱725和磁铁二733之间相互吸引,配合固定盘731固定在驱动轴711的表面,从而驱动轴711受到向上的拉力,进而转动座8受到向上的拉力,进一步抵抗摄像机本体11的重量。
44.磁铁二733位于安装槽732的中部且沿着安装槽732的宽度方向设置,磁铁二733的两侧和安装槽732的侧壁之间均设置有转轴,转轴沿着安装槽732的宽度方向设置,转轴上套设有盘簧,盘簧内侧一端固定安装在该转轴的表面,盘簧的另一端固定安装在安装槽732的内壁上。常态下磁铁二733为竖直状态,从而磁铁二733可沿着转轴转动,并在转动之后,可通过盘簧的弹性使磁铁二733复位至竖直状态。固定盘731的底部且位于安装槽732的左右两侧均固定安装有红外发射器734,固定盘731的底部阵列开设有卡槽735。
45.请参阅图5-8,限位部件74包括有设置在固定盘731下方的套环741,套环741套设在驱动轴711的外侧,套环741的顶部阵列设置有与卡槽735相适配的卡块742,套环741的底部转动连接有支撑环748,支撑环748的底部和固定座7的底壁之间固定安装有电动推杆749,从而通过电动推杆749输出轴伸长,使支撑环748和套环741的装配体上升,当卡块742插接在卡槽735内,套环741跟随固定盘731转动。
46.套环741的顶部阵列设置有三角块743,三角块743底部的长度小于安装槽732的长度,且大于磁铁二733侧面与安装槽732侧壁之间的宽度。从而套环741上移贴合在固定盘731的底部时,三角块743插接在安装槽732的底部,对磁铁二733进行挤压,带动磁铁二733偏转。
47.请参阅图5-8,套环741的顶部且位于三角块743的左右两侧均固定安装有红外传感器744,套环741的外壁上固定安装有环形齿轮二745,环形齿轮二745啮合连接有齿轮二746,齿轮二746的中心处固定安装有马达二747,马达二747固定安装在固定座7的内壁上,通过马达二747带动齿轮二746转动,从而带动环形齿轮二745转动,从而调整三角块743相对安装槽732的位置,进而调整三角块743插接在安装槽732内位于磁铁二733的左侧或者右侧,调整磁铁二733的偏转方向。
48.套环741和支撑环748相对一侧均开设有环形槽,环形槽的横截面呈弧形,套环741和支撑环748之间阵列设置有滚珠,滚珠设置在两个环形槽之间。通过滚珠,降低套环741和支撑环748之间相对转动产生的摩擦力。
49.无人机本体1的内部设置有控制器,控制器内部设置有控制芯片,马达一715、红外发射器734、红外传感器744、马达二747和电动推杆749均与该控制器信号连接,控制器信号连接有手机终端,手机终端内设置有app。
50.在使用时,通过手机终端内app向无人机本体1内的控制器发送指令,驱动马达二
747转动,带动齿轮二746转动,配合齿轮二746和环形齿轮二745的啮合作用,带动套环741逆时针转动,并通过控制器控制安装槽732左侧的红外发射器734发光,当三角块743左侧的红外传感器744移动至安装槽732左侧的三角块743正下方时,红外传感器744接收红外光,并将信号传递至控制器,通过控制器控制马达二747停止,从而使三角块743保持在磁铁二733的左侧;
51.再通过控制器控制电动推杆749的输出轴伸长,推动支撑环748和套环741装配体上移,直至卡块742插接在固定盘731底部开设的卡槽735内部,同时三角块743插接在安装槽732内部,挤压在磁铁二733左侧的下半部,从而带动磁铁二733上半部向左侧偏转,进而使磁铁二733的顶端和转柱725之间的吸引力呈倾斜状;该倾斜的吸引力与固定盘731顺时针转动时的线速度夹角为锐角,从而提供一个驱动固定盘731转动的辅助力,降低驱动驱动轴711和固定盘731转动的驱动力的大小;另外,通过磁铁二733和转柱725之间的吸引力对固定盘731和磁铁二733装配体施加一个向上的拉力,用于抵抗摄像机本体11的重力。
52.再通过控制器控制马达一715启动,带动齿轮一714转动,配合齿轮一714和环形齿轮一713的啮合作用,带动转盘712和驱动轴711的装配体转动,再通过驱动轴711带动转动座8转动,进而调整摄像机本体11的角度;在驱动轴711转动的同时,配合插板717和轴承内环723的连接作用,带动轴承内环723转动,轴承内环723与转柱725摩擦,带动转柱725转动,再配合磁铁一716与转柱725之间的排斥力,对磁铁一716和转盘712的装配体施加一个向上的支撑力,进而降低插板717对轴承内环723位于插槽726底壁处的压力,降低轴承内环723与轴承外环721、转柱725之间的摩擦力。
53.从而顺时针调整摄像机本体11的角度,配合磁铁一716与转柱725之间的排斥力、转柱725和磁铁二733之间的吸引力,对驱动轴711上施加向上的力,降低插板717因为摄像机本体11的重力而施加在轴承内环723上的压力,进而降低轴承内环723与轴承外环721、转柱725之间的压力,降低摩擦力。同理,可逆时针调整摄像机本体11的角度。
54.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1