一种基于时序路标的启发式航天器任务规划方法和装置与流程
本发明属于航空航天,特别涉及一种基于时序路标的启发式航天器任务规划方法和装置。
背景技术:
1、随着航天领域的发展,航天器高度依赖地面控制的方式越来越不适应日益复杂的航天活动。需要航天器自主完成任务规划,减少对地面站网的依赖,提升航天器的灵活性和自主性。
2、自主任务规划技术是解决航天器自主决策、管理和运行的一项关键技术,它能够根据空间环境的感知以及探测器本身的能力和状态,利用人工智能的相关技术对航天器上各分系统的状态进行推理和选择,自动地生成一组满足时序约束的指令序列。航天器通过执行该指令序列,能够在规定的时间内到达期望的状态,完成既定的任务目标。
3、深空一号探测器中使用的远程智能体自主运行软件系统实现了深空探测任务规划技术的在轨应用。该软件系统利用时间线这一特殊结构对规划模型数据进行整合,并同时支持多种类型的资源和时间约束的处理。然而,软件采用的深度优先搜索算法,缺少合适的搜索引导策略,规划效率低且容易陷入局部最优,导致任务规划问题求解时间大大增加。
技术实现思路
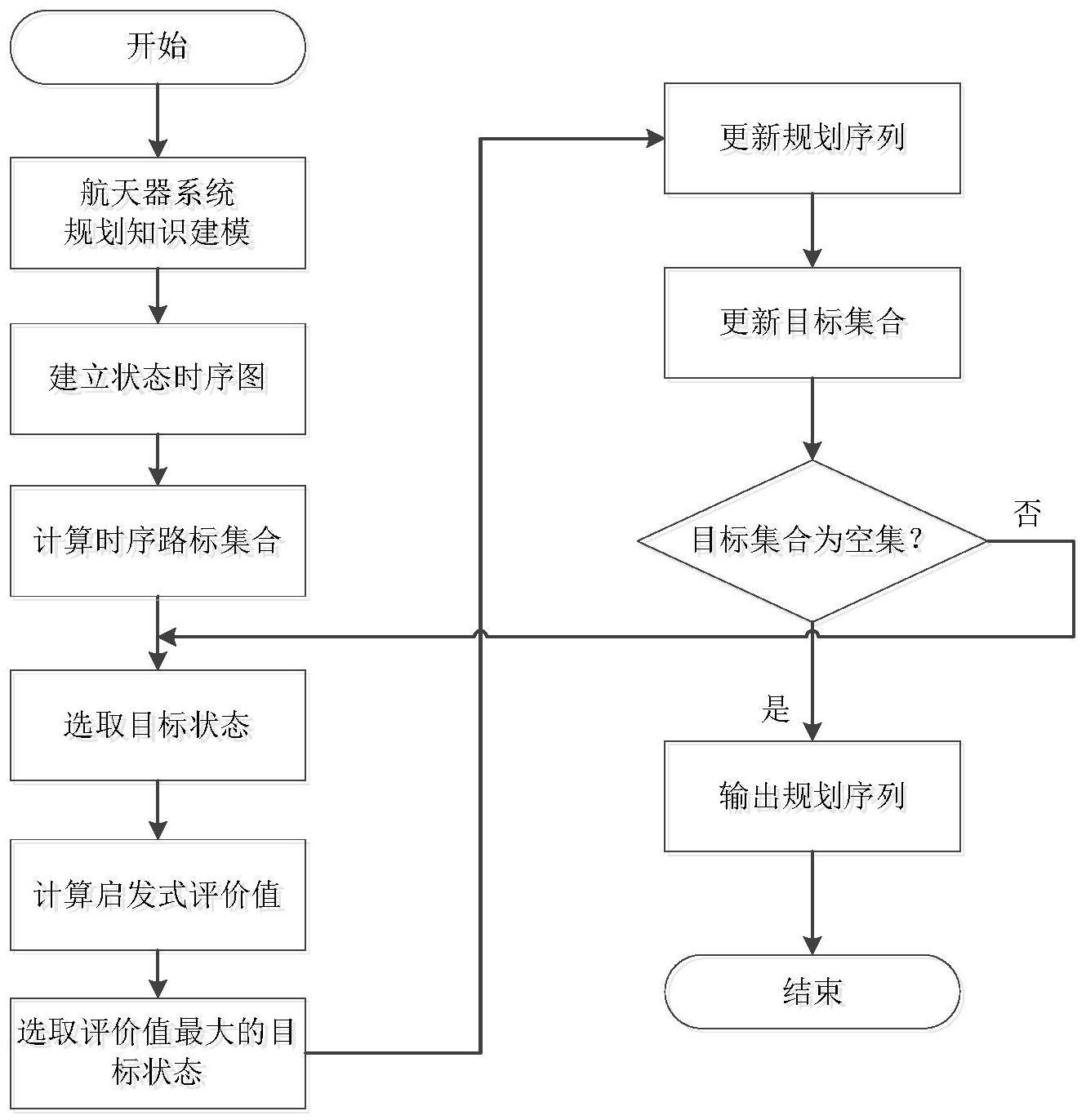
1、有鉴于此,本发明提供了一种基于时序路标的启发式航天器任务规划方法,其利用状态之间的时序关系建立状态时序图,计算时序路标集合,确定状态添加顺序,减少冗余的规划节点,提高任务规划求解效率,包括:
2、步骤s1,对航天器系统进行知识建模,具体包括根据航天器结构、任务需求、设备状态和航天器能力四项因素,对航天器的构成、资源、子系统功能以及需要满足的约束条件进行描述;其中所述约束条件包括因果约束、时间约束和资源约束;
3、步骤s2,建立状态时序图,其用于描述所述航天器中各个子系统内部状态之间的时序关系;其中节点表示各个子系统内部的状态以及状态时间信息,边连接两个节点,表示状态的转换,边的权值代表转换的代价;通过建立状态时序图,计算时序路标集合;
4、步骤s3,选用规划空间搜索作为基本的搜索策略,根据所述约束条件及所述时序路标构建启发式信息,根据启发式排序结果引导规划搜索方向,输出最终的基于时序路标的启发式任务规划求解结果;
5、步骤s4,输出所述航天器的任务规划序列。
6、特别地,所述步骤s2中所述的状态时序图指将模型中状态之间的时序关系和状态时间信息通过图的形式进行表示;所述状态时序图是带有权值的有向图,节点表示各系统内部的状态以及状态时间信息,连接节点之间的边表示状态的转换,箭头指向转换方向;边的权值代表转换的代价。
7、特别地,所述步骤s2中通过建立状态时序图,计算时序路标集合;所述的时序路标集合的计算方法为:
8、步骤s2.1,计算状态时序图中的节点集合v1,vg;所述的状态时序图中的节点集合v1,vg的计算方法为:在状态时序图中选择所有能够通过权值为0的边到达目标,并且满足时间约束的节点,构成节点集合vg;选择状态时序图中初始状态节点的所有可达节点中不属于集合vg的节点,构成节点集合v1;
9、步骤s2.2,所述的初始状态节点的可达节点是指在状态时序图中初始状态节点能够通过一次或多次状态转换到达,且满足时间约束的节点;
10、步骤s2.3,搜索状态时序图中所有由节点集合v1指向节点集合vg的边,根据状态节点的时序关系,检测时间约束的一致性;
11、步骤s2.4,将满足时间约束一致性的边指向的状态节点作为时序路标l,选择所有边的最小权值作为时序路标l的代价cost(l)。
12、将各边的所述权值减去时序路标l的代价cost(l)。
13、步骤2.5:迭代处理步骤2.1至步骤2.4,直到节点集合vg中存在初始状态节点时,停止迭代,输出时序路标集合l,时序路标集合l中包含时序路标l1,时序路标l2……时序路标ln。
14、特别地,所述步骤s3包括:
15、步骤3.1:选取任务目标状态集合中一个目标状态sg1,对目标状态sg1的启发式值进行计算;
16、所述启发式值的计算方法为:搜索目标状态sg1对应的时序路标l,计算状态时序图中除目标状态sg1外所有指向时序路标l的状态集合q;将状态集合q中所有状态的边的权值减去时序路标l的代价cost(l),计算时序路标l1,时序路标l2……时序路标ln;时序路标l1,时序路标l2……时序路标ln的代价为cost(l1),cost(l2)……cost(ln),则目标状态sg1的启发式值h(sg1)为,
17、h(sg1)=max(cost(l1),cost(l2),…,cost(ln));
18、步骤3.2:分别计算所有目标状态sg1,sg2,……sgm的启发式值h(sg1),h(sg2),……h(sg3),选取启发式值最大的目标状态sgj,将目标状态sgj添加到局部规划解中,并在目标状态集合中删除目标状态sgj;
19、步骤3.3:将目标状态sgj的时序条件集合中所有状态加入目标状态集合,按照所述步骤s2中所述方法重新计算时序路标集合l;
20、步骤3.4:迭代处理步骤3.1至步骤3.3,进行规划搜索,直到目标状态集合为空,输出最终的启发式任务规划求解结果,即完成航天器任务规划,缩减搜索空间,提高任务规划效率。
21、特别地,所述子系统包括数据存储、相机、着陆器通讯、采样设备、采样实验共五个子系统。
22、本发明还提出了一种基于时序路标的启发式航天器任务规划装置,包括:
23、知识建模模块,用于对航天器系统进行知识建模,具体包括根据航天器结构、任务需求、设备状态和航天器能力四项因素,对航天器的构成、资源、子系统功能以及需要满足的约束条件进行描述;其中所述约束条件包括因果约束、时间约束和资源约束;
24、时序路标集合计算模块,用于建立状态时序图,其用于描述所述航天器中各个子系统内部状态之间的时序关系;其中节点表示各个子系统内部的状态以及状态时间信息,边连接两个节点,表示状态的转换,边的权值代表转换的代价;通过建立状态时序图,计算时序路标集合;
25、启发式任务规划求解模块,用于选用规划空间搜索作为基本的搜索策略,根据所述约束条件及所述时序路标构建启发式信息,根据启发式排序结果引导规划搜索方向,输出最终的基于时序路标的启发式任务规划求解结果;
26、任务规划序列输出模块,用于输出所述航天器的任务规划序列。
27、有益效果:
28、1、针对航天器系统功能复杂和约束耦合的特点,本发明公开的一种基于时序路标的启发式航天器任务规划方法,利用状态之间的时序关系建立状态时序图,计算时序路标集合,确定状态添加顺序,减少冗余的规划节点,提高任务规划求解效率。
29、2、原有航天器任务规划方法虽然能够进行问题求解,但是带有大量冗余操作和不必要的节点回溯,本发明公开的一种基于时序路标的启发式航天器任务规划方法,根据时序路标集合构建启发式信息,根据启发式排序结果引导规划搜索方向,缩减搜索空间,使得航天器任务规划方法能够在更短时间内获取合理的规划解,即高效地得到航天器任务规划序列,提高任务规划求解效率。
30、3、将航天器任务规划通过状态时序图实现,其是带有权值的有向图,节点表示各系统内部的状态以及状态时间信息,连接节点之间的边表示状态的转换,箭头指向转换方向;边的权值代表转换的代价,保证了对整个任务规划的科学高效规划。
- 还没有人留言评论。精彩留言会获得点赞!