一种森林火灾检测报警无人机的制作方法
1.本发明属于无人机技术领域,具体涉及一种森林火灾检测报警无人机。
背景技术:
2.森林一旦遭受火灾,最直观的危害是烧死或烧伤林木。一方面使森林蓄积下降,另一方面也使森林生长受到严重影响。森林是生长周期较长的再生资源,遭受火灾后,其恢复需要很长的时间。特别是高强度大面积森林火灾之后,森林很难恢复原貌,常常被低价林或灌丛取而代之,并且森林火灾发生后还具有较强的蔓延性,为尽可能的避免火灾进一步发生扩大,人们通过建立监测站、火点采集定点站与无人机检测系统相配合,以达到降低或防止火灾扩大化。
3.现有技术存在的问题:通过无人机携带的检测云台,作为图像传感器用于感知火灾火焰的视觉特征,能够完成初期火灾火焰的识别工作,提升了对森林火灾的灭火能力和预防能力,而当前进行森林防火主要依靠卫星遥感技术,但是这种技术地面的分辨率较低,卫星一般不能及时辨别火情,或是通过人工控制无人机巡航飞行检测,这种使用无人机进行森林的巡查有很快的反应速度和作业效率、巡视面积大,是当前进行森林防火的重要措施,但是也面临了新问题,无人机巡检对火势的判断比较依赖当前空气的洁净程度,以及当前地域的能够获取信息的视线完整度,来判断无人机传输图像价值阶段,而传输图像价值判断的偏差也关系着派出救援力的大小;基于上述情况,本技术提出一种基于图像传输的无人机,能够辅助判断无人机巡检时火灾的情况,提升火灾判断的准确率,具体为一种森林火灾检测报警无人机。
技术实现要素:
4.本发明的目的是提供一种森林火灾检测报警无人机,能够提升火灾判断的准确率,降低图像价值判断的其他因素上的偏差,可通过烟雾检测组件捕捉的烟雾信息,进行预测、判断,提高了火灾检测的准确性与抗干扰能力。
5.本发明采取的技术方案具体如下:一种森林火灾检测报警无人机,包括无人机本体,所述无人机本体的底部安装有检测云台,还包括设置于无人机本体底部的固定台、还包括转动构件、外固定夹、内固定夹、烟雾检测组件,转动设置于固定台的底部,所述外固定夹设置为两个且分别位于固定台的两侧,位于两个所述外固定夹之间,且与外固定夹转动连接,所述烟雾检测组件转向设置于内固定夹的内部,所述烟雾检测组件的底部还固定有用于吸入烟气的长嘴吸口;还包括对应转动构件设置于无人机本体内部的驱动电机,所述驱动电机的输出端与转动构件固定连接,并带动转动构件旋转,使得烟雾检测组件在内固定夹的内部绕转动构件轴心旋转,此时,长嘴吸口呈倾斜状做规律的圆周运动。
6.所述转动构件呈板状,且转动构件由圆形的环板与向下倾斜的斜板组成,所述斜
板与环板之间的角度为度至度;所述烟雾检测组件的顶部与转动构件的斜板固定连接。
7.两个所述外固定夹的端部相对延伸设置有固定接柱;所述内固定夹与固定接柱相对的一侧设置有套筒,所述固定接柱转动插接在套筒的内部。
8.所述内固定夹内面的相对侧设置有与套筒错位的半凹卡环;所述烟雾检测组件包括用于与半凹卡环转动连接的壳体,所述壳体的外环壁设置有弧凸,所述弧凸转动卡接在半凹卡环的内部。
9.所述烟雾检测组件还包括用于提供负压吸引动源的电机仓,所述烟雾检测组件的壳体内部设置有引流驱动环,所述引流驱动环的外环面设置有等距分布的轮齿,所述引流驱动环的内环面设置有等距分布的引流叶片。
10.所述电机仓的内部设置有用于与轮齿啮合的齿轮,所述电机仓的内部还安装有动源电机,所述动源电机带动齿轮转动,用以驱使引流驱动环转动,引入烟雾。
11.所述引流驱动环的顶面与底面均开设有滑道,所述烟雾检测组件的壳体的内部对应滑道还嵌设有转动的降阻滚珠。
12.所述烟雾检测组件还包括设置于引流驱动环上方的烟雾感应器,所述烟雾感应器的内部环形固定有多个栏栅,多个所述栏栅组成的检测暗室,烟雾感应器的内部还设置有检测灯组。
13.所述长嘴吸口为长柱形管件,且长嘴吸口的底端口径小于顶端口径,所述长嘴吸口的内腔壁阵列开设有引流槽,所述引流槽为螺旋上升开设在长嘴吸口的内腔。
14.本发明取得的技术效果为:本发明,烟雾检测组件的顶部与转动构件的斜板固定连接,所以在常态下烟雾检测组件与转动构件的斜板的斜向角度一致,当转动构件转动时,烟雾检测组件以及长嘴吸口同步运动,吸入周围空气,并对其吸入空气的烟雾含量进行检测。
15.本发明,当某山体的小范围内发生火灾时,根据烟雾上浮的原理,巡检的无人机通过底部的长嘴吸口吸入烟气,烟雾感应器进行检测,同获取的影像共同传输至检测站,实现结合影像辅助判断无人机巡检时火灾的情况,提升火灾判断的准确率,降低图像价值判断的其他因素上的偏差,并且火灾的大小与烟雾颗粒粒径分布、浓度的动态变化之间具有密切关系,还可通过吸入的烟雾颗粒浓度预判火灾的发生形式,在当前天气大雾的情况下、或是当前地域获取信息的视线遮挡,不便明察火势情况、又或是无人机电源不足以支撑绕山飞行,均可通过烟雾检测组件捕捉的烟雾信息,进行预测、判断,提高了火灾检测的准确性与抗干扰能力。
附图说明
16.图1是本发明的整体结构示意图;图2是本发明中无人机仰视的结构示意图;图3是本发明中外固定夹、内固定夹、烟雾检测组件与长嘴吸口的分离结构示意图;图4是本发明中图3中a处细节放大的结构示意图;
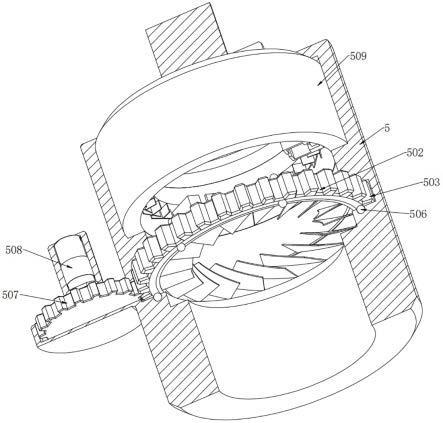
图5是本发明中烟雾检测组件的半剖结构示意图;图6是本发明中烟雾检测组件的内部分离结构示意图;图7是本发明中长嘴吸口半剖的结构示意图;图8是本发明中图7中b处细节放大的结构示意图。
17.附图中,各标号所代表的部件列表如下:1、无人机本体;2、固定台;3、外固定夹;301、固定接柱;4、内固定夹;401、套筒;402、半凹卡环;5、烟雾检测组件;501、弧凸;502、引流驱动环;503、轮齿;504、引流叶片;505、滑道;506、降阻滚珠;507、齿轮;508、动源电机;509、烟雾感应器;510、栏栅;511、检测灯组;6、转动构件;7、长嘴吸口;701、引流槽;8、驱动电机;9、检测云台。
具体实施方式
18.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明。应当理解,以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定。
19.如图1-3所示,一种森林火灾检测报警无人机,包括无人机本体1,无人机本体1的底部安装有检测云台9,还包括设置于无人机本体1底部的固定台2,还包括转动构件6、外固定夹3、内固定夹4与烟雾检测组件5,转动设置于固定台2的底部,外固定夹3设置为两个且分别位于固定台2的两侧,位于两个外固定夹3之间,且与外固定夹3转动连接,烟雾检测组件5转向设置于内固定夹4的内部,烟雾检测组件5的底部还固定有用于吸入烟气的长嘴吸口7;参照附图3,还包括对应转动构件6设置于无人机本体1内部的驱动电机8,驱动电机8的输出端与转动构件6固定连接,并带动转动构件6旋转。
20.参照附图4,转动构件6呈板状,且转动构件6由圆形的环板与向下倾斜的斜板组成,斜板与环板之间的角度为150度至160度。
21.进一步的,随着转动构件6的倾斜角度的更变,长嘴吸口7圆周运动的环面也在更变,当转动构件6的角度为150度时,长嘴吸口7的吸入口抬升运动角度更大,吸入面积更大,当转动构件6的角度为160度时,长嘴吸口7的吸入口下降运动角度变小,吸入面积变小,但同单位体积内可以更集中的吸入。
22.更近一步的,烟雾检测组件5的顶部与转动构件6的斜板固定连接,所以在常态下烟雾检测组件5与转动构件6的斜板的斜向角度一致,当转动构件6转动时,烟雾检测组件5以及长嘴吸口7同步运动,吸入周围空气,并对其吸入空气的烟雾含量进行检测。
23.参照附图4,两个外固定夹3的端部相对延伸设置有固定接柱301,内固定夹4与固定接柱301相对的一侧设置有套筒401,固定接柱301转动插接在套筒401的内部,内固定夹4内面的相对侧设置有与套筒401错位的半凹卡环402,烟雾检测组件5包括用于与半凹卡环402转动连接的壳体,壳体的外环壁设置有弧凸501,弧凸501转动卡接在半凹卡环402的内
部。
24.进一步的,固定接柱301与套筒401的连接为其中一轴向的转动,半凹卡环402与弧凸501为另一轴向的转动,这两个轴向的转动为垂直设置,固定接柱301与套筒401、半凹卡环402与弧凸501可使烟雾检测组件5在受转动构件6的力旋转动时,具有较好的受力框架,以避免无人机受底部烟雾检测组件5的运动甩动,而偏离预定飞行的朝向,故,烟雾检测组件5在内固定夹4的内部绕转动构件6轴心旋转时,长嘴吸口7呈倾斜状做规律的圆周运动。
25.参照附图5,烟雾检测组件5还包括用于提供负压吸引动源的电机仓,烟雾检测组件5的壳体内部设置有引流驱动环502,引流驱动环502的外环面设置有等距分布的轮齿503,引流驱动环502的内环面设置有等距分布的引流叶片504,电机仓的内部设置有用于与轮齿503啮合的齿轮507,电机仓的内部还安装有动源电机508,动源电机508带动齿轮507转动,用以驱使引流驱动环502转动,齿轮507转动带动引流驱动环502旋转,引流驱动环502内部的引流叶片504负压吸入空气,引入空气内的烟雾。
26.参照附图5-6,引流驱动环502的顶面与底面均开设有滑道505,烟雾检测组件5的壳体的内部对应滑道505还嵌设有转动的降阻滚珠506。
27.进一步的,当引流驱动环502转动时,降阻滚珠506滚动降低引流驱动环502在壳体内部转动的阻力,另一方面,降阻滚珠506还可以限制引流驱动环502不脱位。
28.参照附图6,烟雾检测组件5还包括设置于引流驱动环502上方的烟雾感应器509,烟雾感应器509的内部环形固定有多个栏栅510,多个栏栅510组成的检测暗室,烟雾感应器509的内部还设置有检测灯组511。
29.进一步的,烟雾检测组件5还设置有处理主板,该处理主板负责检测烟雾,并传输烟雾数据。
30.进一步的,烟雾感应器509是通过检测灯组511完成烟雾报警,具体是由红外发光管,红外感应管、处理主板(图中未示出)与多个栏栅510组成的检测暗室共同形成,当没有烟雾产生时,检测灯组511所发射的光线不能互相接应,当有烟雾进入小暗室时,这些烟雾小颗粒使检测灯组511发出的光产生散射,导致其中部分光被检测灯组511的红外感应管接受到,并转换成电信号,检测电路将此电信号放大,从而起到报警的作用。
31.更进一步的,通过引流驱动环502引流的空气进入烟雾感应器509内部,由检测灯组511检测内部烟雾,将空气内烟雾的数值随图像一起传输至检测站,辅助检测人员判断火灾形势。
32.参照附图7-8,长嘴吸口7为长柱形管件,且长嘴吸口7的底端口径小于顶端口径,长嘴吸口7的内腔壁阵列开设有引流槽701,引流槽701为螺旋上升开设在长嘴吸口7的内腔,引流槽701可加快气流的吸入。
33.综合上述结构,当某山体的小范围内发生火灾时,根据烟雾上浮的原理,巡检的无人机通过底部的长嘴吸口7吸入烟气,烟雾感应器509进行检测,同获取的影像共同传输至检测站,实现结合影像辅助判断无人机巡检时火灾的情况,提升火灾判断的准确率,降低图像价值判断的其他因素上的偏差,并且火灾的大小与烟雾颗粒粒径分布、浓度的动态变化之间具有密切关系,还可通过吸入的烟雾颗粒浓度预判火灾的发生形式,在当前天气大雾的情况下、或是当前地域获取信息的视线遮挡,不便明察火势情况、又或是无人机电源不足以支撑绕山飞行,均可通过烟雾检测组件捕捉的烟雾信息,进行预测、判断,提高了火灾检
测的准确性与抗干扰能力。
34.需要具体说明的是,本技术中烟雾感应方案在烟雾颗粒体积大于3微米的情况下适用。
35.本发明的工作原理为:通过驱动电机8带动烟雾检测组件5、长嘴吸口7转动,吸入周围空气内的烟雾,使其吸引至烟雾感应器509内部进行检测,在与图像一起传输至检测站,实现结合影像辅助判断无人机巡检时火灾的情况,提升火灾判断的准确率,降低图像价值判断的其他因素上的偏差,并且火灾的大小与烟雾颗粒粒径分布、浓度的动态变化之间具有密切关系,还可通过吸入的烟雾颗粒浓度预判火灾的发生形式,在当前天气大雾的情况下、或是当前地域获取信息的视线遮挡,不便明察火势情况、又或是无人机电源不足以支撑绕山飞行,均可通过烟雾检测组件捕捉的烟雾信息,进行预测、判断,提高了火灾检测的准确性与抗干扰能力。
36.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1