遥感卫星动中成像边记边放任务操控方法与流程
1.本发明涉及一种卫星姿态控制方法,特别是涉及遥感卫星动中成像边记边放任务操控方法。
背景技术:
2.成像型遥感卫星(本发明如无特殊说明,成像型遥感卫星均简称为遥感卫星)是进行全球观测的重要手段。卫星一次成像或一次对地数传均可称为一次任务。实际运行过程中,地面站首先将所需执行的任务上传给遥感卫星,当卫星飞抵目标或地面站上空时,根据任务中的时间信息完成相应的成像或对地数传动作。在某些特殊情况下,卫星同时对地面目标与地面站可见,此时卫星需要在成像过程中实施对地数传,此类任务被称为边记边放任务。
3.传统的遥感卫星在成像时,卫星姿态保持不变,载荷依靠卫星相对地球的运动实现推扫成像,因此在执行边记边放任务时,卫星只需提前机动到成像姿态,然后分别进行载荷成像与对地数传即可。
4.随着新型遥感技术的不断发展,动中成像模式已被越来越多的遥感卫星所采用。这种模式是由卫星本体和数传天线共同发生姿态变化来完成边记边放任务的。然而,卫星在成像过程中按照特定的运动规律变化会给边记边放任务的操控带来困难,主要包括以下几个方面:
5.·
成像过程中如果姿态角速度过大,有可能超出数传天线转动能力,导致对地数传失败;
6.·
由于成像期间卫星姿态不断变化,传统的保持固定姿态的操控方式已经不适用于动中成像边记边放任务;
7.·
动中成像一般持续时间不超过1分钟,而数传弧段长达7~10分钟,如果将成像期间的姿态运动规律扩展到整个数传弧段期间,容易导致姿态运动发散,危及整星安全。
8.因此需要针对动中成像边记边放任务,采用专门的操控方法,使整个动中成像边记边放任务期间卫星不发生大角速度的姿态变化,从而保证动中成像与对地数传的有效执行。
技术实现要素:
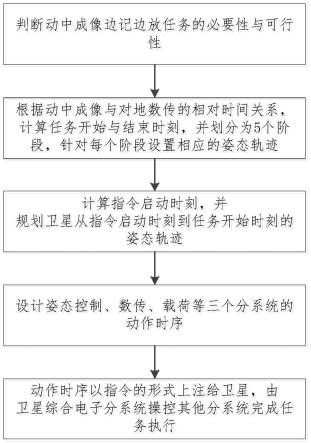
9.有鉴于此,针对动中成像边记边放任务,本发明提出了一种遥感卫星动中成像边记边放任务操控方法。本发明首先检查动中成像边记边放任务的必要性与可行性,然后采用分段规划的方法,对动中成像边记边放过程中卫星的姿态轨迹进行设计,实现卫星姿态的平稳变化,进而为数传天线的姿态变化提供良好的基础,最终完成动中成像边记边放任务。
10.具体包括以下内容:
11.步骤一,根据动中成像起止时刻与姿态需求、数传弧段起止时刻、载荷开机与关机
耗时、数传开机与关机耗时、数传天线最大转动角速度,判断是否执行动中成像边记边放任务,如果不执行,方法结束,否则,执行动中成像边记边放任务,转入步骤二;
12.步骤二,将动中成像边记边放任务划分为五个不同的阶段,即成像前保持阶段、成像前预置阶段、动中成像阶段、成像后预置阶段,以及成像后保持阶段,并为每个阶段设置不同的姿态轨迹;
13.步骤三,根据动中成像边记边放任务开始时刻、卫星数传开机耗时、载荷开机耗时、卫星姿态机动最大耗时等参数,计算动中成像边记边放任务的指令启动时刻,并规划卫星从指令启动时刻到任务开始时刻的姿态轨迹。
14.步骤四,根据步骤二、步骤三得到的各时刻与姿态轨迹,设计姿态控制、数传、载荷等三个分系统的动作时序。
15.步骤五,将步骤四得到的各分系统动作时序以指令的形式上注给卫星,卫星综合电子分系统在指定时刻操控数传、姿态控制、载荷分系统共同完成动中成像边记边放任务。
16.有益效果:
17.1)突破了数传期间卫星必须保持固定姿态的限制,通过在动中成像前、后分别设置姿态保持段和预置段,使卫星在整个数传弧段期间姿态能够平稳变化,进而使卫星能够在动中成像的姿态运动过程实现对地数传,可提升卫星应对复杂在轨任务的能力,提升应用效能。
18.2)本发明提出了基于动中成像开始与结束时刻的姿态计算前预置姿态与后预置姿态的方法,前预置姿态、后预置姿态的计算考虑了卫星动中成像的角度、角速度、角加速度,使卫星在成像前预置、成像后预置两个阶段中姿态不出现剧烈变化,易于卫星姿态控制系统实现。
19.3)本发明对数传弧段、动中成像时段的相对时间关系没有限制,可适用于数传弧段、动中成像时段相互交叠的各种情况;
20.4)本发明所述的操控方法通过综合电子分系统进行时序控制来实现载荷、数传、控制等分系统间的配合,无需增加星上各分系统的功能,实现灵活,适用范围广。
附图说明
21.图1为本发明流程示意图。
22.图2为动中成像边记边放任务阶段划分与姿态轨迹示意图。
具体实施方式
23.为便于描述本发明的实施步骤,首先定义如下参数,这些参数均由卫星成像需求、地面站或卫星设计方案中获得,为本发明的输入:
24.·
记动中成像起止时刻分别为t
img_start
、t
img_end
,由卫星轨道、目标位置、成像需求获得;
25.·
记动中成像姿态轨迹需求为离散点集合,形式为其中n+1为离散点个数,θi,ωi,ai分别代表ti时刻卫星动中成像所需的姿态角、角速度矢量、角加速度矢量;
26.·
记数传弧段起止时刻为t
trans_start
、t
trans_end
,由地面站统一分配;
27.·
记数传天线最大转动角速度为w
trans_max
,载荷开机耗时为t
pl_on
,载荷关机耗时为t
pl_off
,数传开机耗时为t
trans_on
,数传关机耗时为t
trans_off
,这里所指的开机耗时是指星上设备从接收开机指令到具备执行动作条件的耗时,关机耗时是指星上设备从接收关机指令到设备关闭、具备接收后续指令的耗时,均由卫星的设计方案确定;
28.·
记卫星从任意两个可能的姿态切换所需的最大耗时为t
man
。
29.基于上述输入参数,本发明的具体实施步骤:
30.步骤一,根据动中成像起止时刻与姿态需求、数传弧段起止时刻、载荷开机与关机耗时、数传开机与关机耗时、数传天线最大转动角速度,判断是否执行动中成像边记边放任务。如果动中成像时段与数传弧段间隔较长,或者动中成像所需的姿态角速度过大,则动中成像与对地数传不应融合为一次动中成像边记边放任务,否则执行动中成像边记边放任务,转入步骤二。
31.其中,具体判断方法如下:
32.情况一、如果动中成像起止时刻与数传弧段起止时刻相隔足够长的时段,即满足式(1)或式(2)所示的关系,则成像与数传可按照两次独立的任务进行编排,无需再编排动中成像边记边放任务。
33.t
trans_start-t
img_end
>t
pl_off
+t
trans_on
ꢀꢀꢀ
(1)
34.t
img_end-t
trans_start
》t
trans_off
+t
pl_on
ꢀꢀꢀ
(2)
35.情况二、如果动中成像期间卫星姿态机动角速度大于数传天线最大转动角速度的0.5倍,则数传天线存在无法跟踪地面站的风险。
36.上述两种情况至少满足一种,则表明不应将动中成像、对地数传任务合并为一次动中成像边记边放任务,本方法结束;否则转入步骤二。
37.步骤二,根据动中成像的起止时刻、数传弧段起止时刻,计算动中成像边记边放任务的任务开始时刻与任务结束时刻;将任务开始时刻到任务结束时刻的时段划分为五个不同的阶段,分别为成像前保持、成像前预置、动中成像、成像后预置、成像后保持;并为每个阶段设置不同的姿态轨迹,其中在成像前保持、成像后保持阶段卫星均保持固定姿态不变,成像前预置、成像后预置阶段卫星采用多项式姿态轨迹,动中成像阶段卫星姿态轨迹与动中成像姿态轨迹需求一致。
38.具体实现过程如下:首先计算任务开始时刻t
mission_start
、任务结束时刻t
mission_end
:
39.t
mission_start
=min(t
img_start-t
pre
,t
trans_start
)
40.t
mission_end
=max(t
img_end
+t
pre
,t
trans_end
)
41.其中t
pre
为预置时长,在本发明中为固定值10s。
42.然后将时段[t
mission_start
,t
mission_end
]划分为以下五个阶段,实现卫星姿态平滑,为数传天线传输数据创造条件:
[0043]
阶段1:成像前保持阶段,对应的时刻为[t
mission_start
,t
img_start-t
pre
]。在此阶段,卫星将保持在固定的前预置姿态角,姿态角速度和角加速度均为0,其中前预置姿态角设置为:
[0044]
[0045]
上式中,θ
pre
为前预置姿态角,θ0、ω0、a0分别为成像开始时刻t
img_start
卫星姿态角、角速度矢量、角加速度矢量,可由动中成像的姿态需求获得。
[0046]
阶段2:成像前预置阶段,对应的时刻为(t
img_start-t
pre
,t
img_start
]。在此阶段,卫星将从前预置姿态角θ
pre
开始逐渐机动,并在成像开始时刻t
img_start
达到卫星动中成像所需的姿态角θ0、角速度ω0、角加速度a0。姿态运动轨迹采用多项式曲线表示,可实现姿态角速度、角加速度的平稳变化。其中,多项式曲线表示采用一种基于多项式的卫星姿态机动方法进行轨迹规划,此为现有技术。
[0047]
阶段3:动中成像阶段,对应的时刻为(t
img_start
,t
img_end
]。在此阶段,卫星将严格跟踪卫星动中成像所需的姿态轨迹。
[0048]
阶段4:成像后预置阶段,对应的时刻为(t
img_end
,t
img_end
+t
pre
]。在此阶段,卫星将从成像结束时刻的姿态开始运动,并在时刻t
img_end
+t
pre
达到后预置姿态角,且卫星角速度、角加速度均达到0。姿态运动轨迹采用多项式曲线表示,可实现姿态角速度、角加速度的平稳变化。其中,多项式曲线表示采用一种基于多项式的卫星姿态机动方法进行轨迹规划,此为现有技术。其中后预置姿态角设置为:
[0049][0050]
上式中,θ
aft
为后预置姿态角,θn、ωn、an分别为成像结束时刻t
img_end
卫星姿态角、角速度矢量、角加速度矢量,可由动中成像的姿态需求获得。
[0051]
阶段5:成像后保持阶段,对应的时刻为(t
img_end
+t
pre
,t
mission_end
]。在此阶段,卫星将保持固定的后预置姿态角θ
aft
不变,姿态角速度和角加速度均为0。
[0052]
步骤三,根据动中成像边记边放任务开始时刻、卫星数传开机耗时、载荷开机耗时、卫星姿态机动最大耗时等参数,计算动中成像边记边放任务的指令启动时刻(以下简称“指令启动时刻”),并规划卫星从指令启动时刻到任务开始时刻的姿态轨迹。具体实施过程如下:
[0053]
首先计算指令启动时刻t
com
:
[0054]
t
com
=t
mission_start-t
max
[0055]
t
max
=max{t
man
,t
trans_on
,t
pl_on
}
[0056]
其中,t
mission_start
、t
man
、t
trans_on
、t
pl_on
的定义均与前文保持一致。
[0057]
然后规划卫星从指令启动时刻到任务开始时刻的姿态轨迹。在指令启动时刻t
com
,卫星姿态处于初始状态,记该时刻卫星姿态角、角速度、角加速度分别为θ
com
、ω
com
、a
com
;在任务开始时刻t
mission_start
,卫星应机动至前预置姿态θ
pre
,同时角速度、角加速度达到0。本发明采用五阶多项式曲线表示该阶段的姿态轨迹,可实现姿态角速度、角加速度的平稳变化,此为现有技术。
[0058]
步骤四,根据步骤二、步骤三得到的各时刻与姿态轨迹,设计姿态控制、数传、载荷三个分系统的动作时序。姿态控制分系统用于完成卫星本体姿态指向控制,满足任务期间载荷相机或者雷达的地面目标指向姿态和机动需求,同时在非任务期间满足姿态对日充电等需求;数传分系统是卫星载荷数据下传到地面接收站的高速通信通道;载荷是卫星执行在轨任务的具体单元,例如光学相机、雷达等具体设备。详细的动作时序安排如下:
[0059]
·
在指令启动时刻,数传分系统、载荷分系统开机,数传天线开始对地面站进行跟
踪;
[0060]
·
在指令启动时刻,姿态控制分系统开始进行按照步骤二、步骤三的姿态轨迹进行运动。完整的姿态轨迹如图2所示,包括6个阶段。在图2中,阶段0对应步骤三中从指令启动时刻t
com
到任务开始时刻t
mission_start
的时段;阶段1~5分别与步骤二中的各阶段一一对应,图2中的两条曲线分别示意了不同阶段卫星姿态角与角速度的变化趋势。
[0061]
·
在成像开始时刻,载荷分系统开始成像;
[0062]
·
在成像结束时刻,载荷分系统结束成像,转入待机状态;
[0063]
·
在数传开始时刻,数传分系统开始向地面下传数据;
[0064]
·
在数传结束时刻,数传分系统结束向地面下传数据,同时数传天线不再对地面站跟踪;
[0065]
·
在任务结束时刻,数传分系统关机,载荷分系统关机,姿态控制分系统转入后续运行状态。
[0066]
步骤五,将步骤四得到的各分系统动作时序以指令的形式上注给卫星,并存储在卫星综合电子分系统的星务计算机中;星务计算机按照指令中的发令时刻,分别对数传、姿态控制、载荷分系统发送指令,完成姿态轨迹控制、对地数传、载荷成像等各项动作,从而实现动中成像边记边放任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1