一种喷洒农药用无人机
1.本发明涉及智能喷洒农药用无人机技术,特别涉及一种喷洒农药用无人机。
背景技术:
2.目前,人们进行农药喷洒主要是通过驾驶移动器械进行手动范围的喷洒,根据农作物的病害情况喷洒农药,但这种方法非常浪费人力资源,对于范围较大的喷洒面积,这种方法增大了人力成本,如果仅仅采用无人驾驶机械进行喷洒又无法识别病害情况,只会造成农药的过度使用和浪费。
技术实现要素:
3.为了至少解决或部分解决上述问题,提供一种喷洒农药用无人机。
4.为了达到上述目的,本发明提供了如下的技术方案:本发明一种喷洒农药用无人机,包括无人机主体和数据处理系统,所述无人机主体上安装有摄像头,所述无人机主体的底部设置有储液罐,所述储液罐的底部安装有喷头,所述喷头上设置有控制结构,所述数据处理系统包括图像收集模块、图像预处理模块、病变识别模块、喷淋控制模块、运动控制模块、gps定位模块、导航模块;所述导航模块根据预设的路线进行导航,并将预设的路线发送至运动控制模块;所述运动控制模块根据预设的路线控制无人机主体向着路线移动;所述gps定位模块用于定位无人机的位置,并将数据发送给地面的控制站;所述图像收集模块通过摄像头收集飞机下方农作物的图像数据,并将图像数据发送至图像预处理模块;所述图像预处理模块将图像数据进行预处理,并将图像数据发送至病变识别模块;所述病变识别模块利用病害特征图像建立样本库,搭建深度学习框架,训练网络模型,采用区域提案网络与边界框回归损失对病害进行识别,将识别结果发送至喷淋控制模块;所述喷淋控制模块控制控制结构对喷头的喷淋进行启闭。
5.作为本发明的一种优选技术方案,所述控制结构包括横截面大小与喷头相同的挡板,所述挡板的一端连接有转轴,所述转轴的一端连接有驱动电机,所述驱动电机与喷淋控制模块信号连接。
6.作为本发明的一种优选技术方案,所述图像预处理模块采用均光快速滤波算法对图像进行降噪处理,再将农作物的图像和背景图像差分处理,增加农作物的图像的对比度。
7.作为本发明的一种优选技术方案,所述数据处理系统还包括通信模块,所述数据处理系统通过通信模块进行信息交互。
8.作为本发明的一种优选技术方案,所述无人机上设置有太阳能电池板,所述太阳能电池板为无人机提供电能。
9.与现有技术相比,本发明的有益效果如下:本发明采用智能无人机技术来实现农药的自动喷洒,利用智能识别系统来识别病害并实现精准喷洒,从而提高农药的利用效率,利用无人机的自动巡航系统实现无人喷洒,减少了人力成本。
附图说明
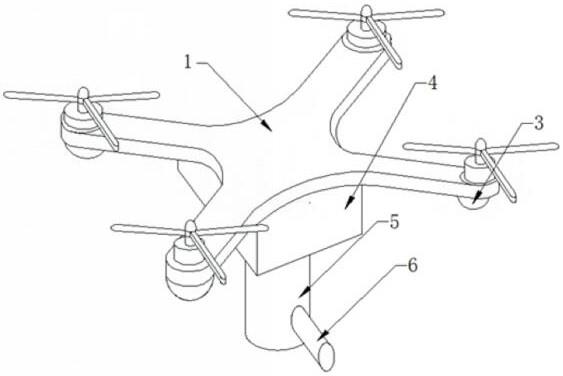
10.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:图1是本发明的整体结构示意图;图2是本发明控制结构的整体结构示意图;图3是本发明数据处理系统的模块图;图中:1、无人机主体;2、数据处理系统;3、摄像头;4、储液罐;5、喷头;6、控制结构;7、图像收集模块;8、图像预处理模块;9、病变识别模块;10、喷淋控制模块;11、运动控制模块;12、gps定位模块;13、导航模块;14、挡板;15、转轴;16、驱动电机;17、通信模块。
具体实施方式
11.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
12.此外,如果已知技术的详细描述对于示出本发明的特征是不必要的,则将其省略。需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
13.实施例1如图1-3所示,本发明提供一种喷洒农药用无人机,包括无人机主体1和数据处理系统2,无人机主体1上安装有摄像头3,无人机主体1的底部设置有储液罐4,储液罐4的底部安装有喷头5,喷头5上设置有控制结构6,数据处理系统2包括图像收集模块7、图像预处理模块8、病变识别模块9、喷淋控制模块10、运动控制模块11、gps定位模块12、导航模块13;导航模块13根据预设的路线进行导航,并将预设的路线发送至运动控制模块11;运动控制模块11根据预设的路线控制无人机主体1向着路线移动;gps定位模块12用于定位无人机的位置,并将数据发送给地面的控制站;图像收集模块7通过摄像头3收集飞机下方农作物的图像数据,并将图像数据发送至图像预处理模块8;图像预处理模块8将图像数据进行预处理,并将图像数据发送至病变识别模块9;病变识别模块9利用病害特征图像建立样本库,搭建深度学习框架,训练网络模型,采用区域提案网络与边界框回归损失对病害进行识别,将识别结果发送至喷淋控制模块10;喷淋控制模块10控制控制结构6对喷头5的喷淋进行启闭。
14.具体的,在使用的过程中,先设定预先的航道,启动无人机,无人机启动时,利用
gps定位模块12对无人机的位置进行准确定位,然后利用导航模块13根据预定的航道进行行驶,并通过底部的摄像头3收集航道下方的农作物的图像数据,并将图像数据进行处理,自动识别病害,并根据病害情况喷洒农药。
15.农药喷洒通过控制结构6来完成,控制结构6包括横截面大小与喷头相同的挡板14,挡板14的一端连接有转轴15,转轴15的一端连接有驱动电机16,驱动电机16与喷淋控制模块10信号连接,喷淋控制模块10接收到喷洒指令时,通过驱动电机16启动带动转轴15转动,转轴15转动带动挡板14转动,从而使封闭住喷头5的挡板14旋转,使农药喷洒而出,在关闭时,利用挡板14横截面大小与喷头5相同的特性,封住喷头5的出口使农药喷口关闭。
16.在智能识别时,需要先对图像进行预处理,图像预处理模块8采用均光快速滤波算法对图像进行降噪处理,再将农作物的图像和背景图像差分处理,增加农作物的图像的对比度,通过对图像预处理从而提高图像的清晰度,方便进行病害识别。
17.为了实现各个数据模块之间的信息交互,数据处理系统2还包括通信模块17,数据处理系统2通过通信模块17进行信息交互,利用无线通信技术来达到联通的作用。
18.为了提高无人机的续航能力,在无人机1上设置有太阳能电池板,太阳能电池板为无人机提供电能,利用太阳能电池板吸收太阳能从而实现清洁能源的利用。
19.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种喷洒农药用无人机,其特征在于,包括无人机主体(1)和数据处理系统(2),所述无人机主体(1)上安装有摄像头(3),所述无人机主体(1)的底部设置有储液罐(4),所述储液罐(4)的底部安装有喷头(5),所述喷头(5)上设置有控制结构(6),所述数据处理系统(2)包括图像收集模块(7)、图像预处理模块(8)、病变识别模块(9)、喷淋控制模块(10)、运动控制模块(11)、gps定位模块(12)、导航模块(13);所述导航模块(13)根据预设的路线进行导航,并将预设的路线发送至运动控制模块(11);所述运动控制模块(11)根据预设的路线控制无人机主体(1)向着路线移动;所述gps定位模块(12)用于定位无人机的位置,并将数据发送给地面的控制站;所述图像收集模块(7)通过摄像头(3)收集飞机下方农作物的图像数据,并将图像数据发送至图像预处理模块(8);所述图像预处理模块(8)将图像数据进行预处理,并将图像数据发送至病变识别模块(9);所述病变识别模块(9)利用病害特征图像建立样本库,搭建深度学习框架,训练网络模型,采用区域提案网络与边界框回归损失对病害进行识别,将识别结果发送至喷淋控制模块(10);所述喷淋控制模块(10)控制控制结构(6)对喷头(5)的喷淋进行启闭。2.根据权利要求1所述的一种喷洒农药用无人机,其特征在于,所述控制结构(6)包括横截面大小与喷头相同的挡板(14),所述挡板(14)的一端连接有转轴(15),所述转轴(15)的一端连接有驱动电机(16),所述驱动电机(16)与喷淋控制模块(10)信号连接。3.根据权利要求1所述的一种喷洒农药用无人机,其特征在于,所述图像预处理模块(8)采用均光快速滤波算法对图像进行降噪处理,再将农作物的图像和背景图像差分处理,增加农作物的图像的对比度。4.根据权利要求1所述的一种喷洒农药用无人机,其特征在于,所述数据处理系统(2)还包括通信模块(17),所述数据处理系统(2)通过通信模块(17)进行信息交互。5.根据权利要求1所述的一种喷洒农药用无人机,其特征在于,所述无人机(1)上设置有太阳能电池板,所述太阳能电池板为无人机提供电能。
技术总结
本发明公开了一种喷洒农药用无人机,包括无人机主体和数据处理系统,无人机主体上安装有摄像头,无人机主体的底部设置有储液罐,储液罐的底部安装有喷头,喷头上设置有控制结构,数据处理系统包括图像收集模块、图像预处理模块、病变识别模块、喷淋控制模块、运动控制模块、GPS定位模块、导航模块;导航模块根据预设的路线进行导航,并将预设的路线发送至运动控制模块;运动控制模块根据预设的路线控制无人机主体向着路线移动。本发明采用智能无人机技术来实现农药的自动喷洒,利用智能识别系统来识别病害并实现精准喷洒,从而提高农药的利用效率,利用无人机的自动巡航系统实现无人喷洒,减少了人力成本。减少了人力成本。减少了人力成本。
技术研发人员:王旭 李光林
受保护的技术使用者:西南大学
技术研发日:2022.12.12
技术公布日:2023/2/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1