一种系留式无人机精准辅助降落装置、方法及系统
本发明属于无人机导航定位,涉及一种系留式无人机精准辅助降落装置、方法及系统。
背景技术:
1、系留无人机使用通过系留线缆传输的地面电能作为动力来源,代替传统的锂电池,可实现长时间的滞空悬停作业。目前,系留无人机主要用于定点位置的通讯支持、图像遥测、电视转播等。
2、随着无人机在生产生活中的用途越来越广泛,对无人机的精准识别和降落的要求也就越来越高。现阶段应用较多的无人机精准降落方案主要有:rtk gps和图像识别(视觉)。基于rtk gps的精准降落技术,通过rtk基站给无人机发送自身在大地坐标系下的精确位置。无人机通过rtk gps实现无人机精准降落的方式主要依靠rtk gps定位精度可达厘米级这一特性实现的,只需要给定精准的目标降落位置,再结合无人机自身精准的实时位置即可实现无人机精准降落。缺点为:系统需要依赖的组件多(移动站、固定站、天线、无线数传等),成本昂贵。基于图像识别技术,使用无人机机载图像识别设备识别地面目标降落点,获得目标降落点与无人机的相对位置。如:二维码识别降落。此方案相较于rtk gps降落技术优势明显,精度可达厘米级别,但是在单一视觉降落过程中的误差大。
技术实现思路
1、本发明的目的在于提供一种系留式无人机精准辅助降落装置、方法及系统。用于解决以下两个问题,1)现有rtk gps定位系统,组件多、成本高的问题;2)图像识别定位系统在单一视觉降落过程中的误差大的的问题。
2、为达到上述目的,本发明采用以下技术方案予以实现:
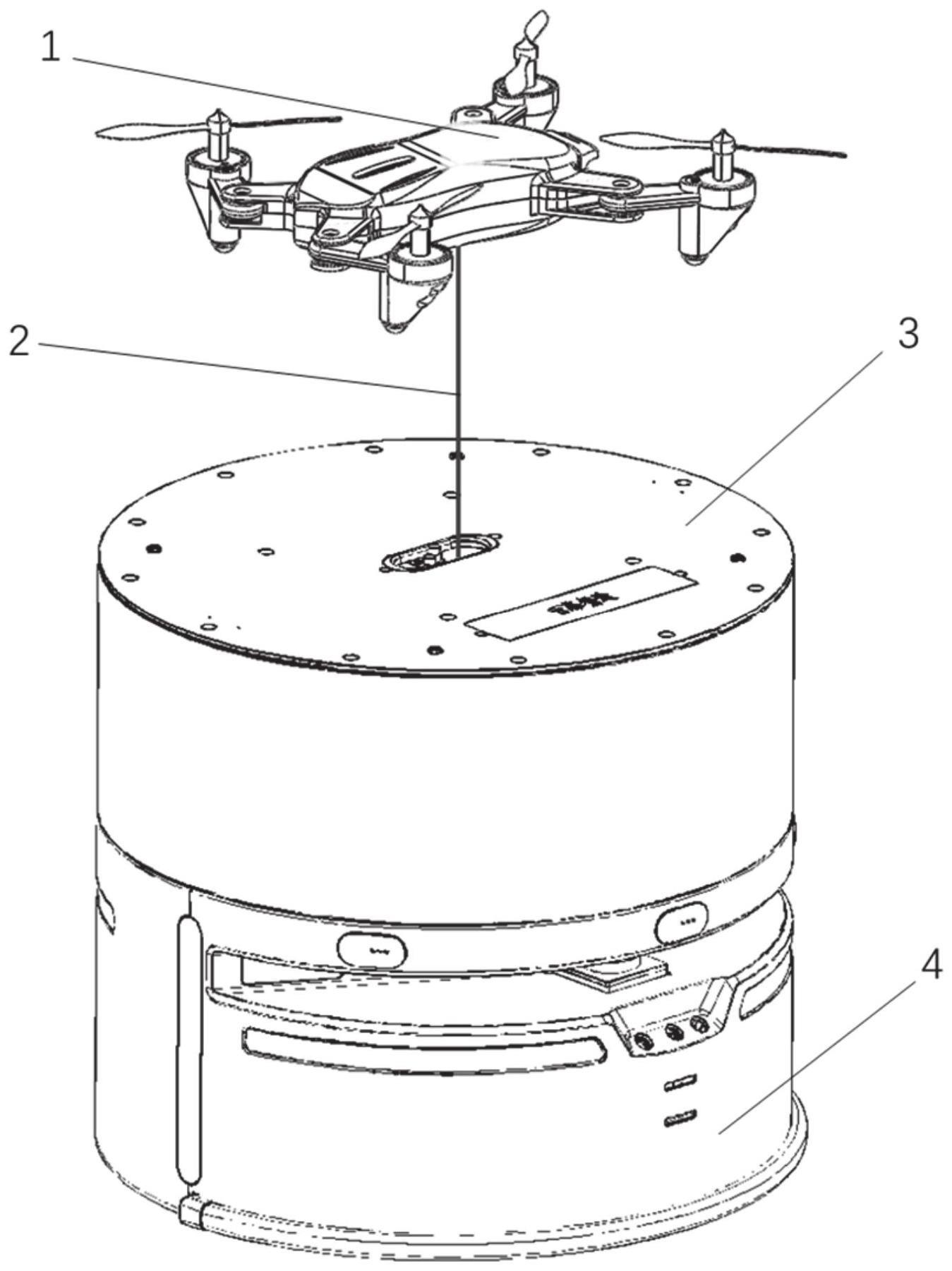
3、一种系留式无人机精准辅助降落装置,包括:无人机和系留平台;
4、无人机包括上位机、相机和动力装置;上位机分别连接相机和动力装置;相机采集系留平台的图片信息,并发送给上位机;上位机对接收的信息进行处理,并向动力装置下发指令,控制动力装置的工作状态;
5、系留平台包括壳体、系留线缆收放装置、agv小车;下位机和系留线缆;agv小车、系留线缆收放装置和下位机均位于壳体内部;壳体顶部的中间位置设置有通孔,系留线缆通过通孔连接无人机;系留线缆收放装置连接系留线缆;下位机连接系留线缆收放装置和agv小车,下位机电连接上位机,下位机接收上位机所发送的信号,控制系留线缆收放装置的工作状态。
6、本发明的进一步改进在于:
7、进一步的,无人机和系留平台均包括电池,无人机的电池连接上位机、相机和动力装置,向上位机、相机和动力装置进行供电;系留平台的电池连接下位机、agv小车和系留线缆收放装置;向下位机、agv小车和系留线缆收放装置进行供电;下位机判断系留平台的电池的电池电量,若小于最低电量,下位机驱动agv小车运动到充电处,对系留平台的电池进行充电。
8、进一步的,壳体顶部设置有红灯和绿灯;红灯和绿灯均为两个,红灯和绿灯均匀设置在通孔的周围;相机为单目相机;最低电量由人为设定;系留平台的电池通过系留线缆向无人机的电池进行供电。
9、一种系留式无人机精准辅助降落方法,包括:
10、接收相机所采集到的系留平台的图片信息;
11、基于所接收的系留平台的图片信息,获取无人机与系统平台的相对高度信息和航向信息;
12、基于相对高度信息和航向信息,驱动驱动装置调整无人机飞行姿态进行降落;
13、判断无人机与系统平台的相对高度是否大于所设定高度阈值,若是,驱动系留线缆收放装置使得系留线缆保存拉直状态;若否,驱动系留线缆收放装置进行收线,完成无人机的降落。
14、进一步的,基于所接收的系留平台的图片信息,获取无人机与系统平台的相对高度信息;具体为:
15、对系留平台的图片通过棋盘格进行标定,识别红灯和绿灯的特征强度,通过判断红灯与绿灯对应像素点在图像上的位置得到无人机方位;
16、基于灰度重构算法,获取红灯与绿灯在图像中的坐标;
17、基于perspective-n-point算法对比内置的灯光点真实坐标,对世界坐标系、相机坐标系、图像坐标系和像素坐标系进行坐标变换得到相机位置,即得到无人机相对停机坪高度。
18、进一步的,基于灰度重构算法,获取红灯与绿灯在图像中的坐标;具体为:
19、识别图像红色与绿色得到红光图片imgredlight与绿光图片imggreenlight,基于灰度重心算法获取亮斑的质心,针对亮度不均匀的目标利用极值法获取光强最大的一点gmax,并确定一个阀值k=gmax-g;在阈值两边判断大于k的元素,获取其重心位置作为目标的中心;对于m*n大小的图像f,像素的灰度值fij凡是超过阈值k的均参与重心处理,于是重心坐标为:
20、
21、
22、其中,
23、即可获取红色特征点坐标maxr1、maxr2,及绿色特征点坐标maxg1、maxg2。
24、进一步的,获取无人机的航向信息,具体为:
25、无人机航向信息,即无人机相对系留平台的角度,设定系留平台的正方向;图像中灯光点数大于等于3;
26、若只有1个绿点,设图像中红灯r1坐标为(x0,y0),r2为(x1,y1),无人机相对角度为:
27、
28、若只有1个红点,设图像中绿灯g1坐标为(x1,y1),g2为(x2,y2),无人机相对角度为:
29、
30、图像中灯光点数为4:
31、基于perspective-n-point算法,对比四个灯的在世界坐标系的坐标与图像坐标系的坐标,获取旋转矩阵nx,其方向向量为(x,y,z);
32、无人机相对角度为:
33、
34、进一步的,判断无人机与系统平台的相对高度是否大于所设定高度阈值,若是,驱动系留线缆收放装置使得系留线缆保存拉直状态;具体为:当无人机与系统平台的相对高度大于0.5m时,无人机高度持续下降,上位机发送信号给下位机,下位机驱动系留线缆收放装置使得系留线缆保存拉直状态,但不对无人机进行产生拉力。
35、进一步的,驱动系留线缆收放装置进行收线,完成无人机的降落;具体为:
36、当无人机与系统平台的相对高度小于0.5m时,上位机发送信号给下位机,下位机驱动系留线缆收放装置进行收线,系留线缆收放装置收线的力大于无人机升力使无人机牵连精准降落。
37、一种系留式无人机精准辅助降落系统,包括:
38、接收模块,所述接收模块用于接收相机所采集到的系留平台的图片信息;
39、获取模块,所述获取模块基于所接收的系留平台的图片信息,获取无人机与系统平台的相对高度信息和航向信息;
40、驱动模块,所述驱动模块基于相对高度信息和航向信息,驱动驱动装置调整无人机飞行姿态进行降落;
41、判断模块,所述判断模块用于判断无人机与系统平台的相对高度是否大于所设定阈值,若是,驱动系留线缆收放装置使得系留线缆保存拉直状态;若否,驱动系留线缆收放装置进行收线,完成无人机的降落。
42、与现有技术相比,本发明具有以下有益效果:
43、本发明通过相机采集系留平台的图片信息,并发送给上位机进行处理,上位机向动力装置下发指令,控制动力装置的工作状态;下位机电连接上位机,下位机接收上位机所发送的信号,控制系留线缆收放装置的工作状态。本发明结构简单,没有复杂的组件,可显著节约成本。
44、进一步的,本发明基于单目相机获取的图片信息,计算无人机与系统平台的相对高度信息和航向信息,进而在相对高度信息小于高度阈值时,采用系留线缆收放装置对无人机进行牵拉,保证无人机精准降落在预设停机位,可消除单一视觉降落的厘米级误差。
- 还没有人留言评论。精彩留言会获得点赞!