一种具有无人机固定装置的停机坪的制作方法
1.本技术涉及无人机设备的领域,尤其是涉及一种具有无人机固定装置的停机坪。
背景技术:
2.无人机全称为无人驾驶的飞机,是一种利用无线电遥控设备和机体自身的程序进行控制的不载人飞行器,无人机通常分为军用和民用两大类,民用无人机常用于进行航拍、野生动物监控、测绘、快递运输等领域。
3.无人机在进行户外长时间作业时,为了对无人机进行保护,通常会携带一个无人机停机坪用于停放无人机,相关技术中的无人机停机坪包括机架,机架上安装有用于停放无人机的停机平台,机架上转动安装有保护罩,保护罩转动后将停机平台的顶壁覆盖,无人机停放在停机平台上后,通过保护罩对无人机进行保护。
4.然而当户外的环境较为恶劣,风速等级较大时,机架和停机平台可能会出现晃动弹跳现象,使得停放在停机平台上的无人机可能会出现移动,进而使得无人机可能会与保护罩之间产生碰撞,使得无人机可能会出现损坏。
技术实现要素:
5.为了解决无人机停放在停机平台上时会因为停机平台的抖动而与保护罩之间发生碰撞出现损坏的现象,本技术提供一种具有无人机固定装置的停机坪。
6.本技术提供的一种具有无人机固定装置的停机坪采用如下的技术方案:
7.一种具有无人机固定装置的停机坪,包括机架,所述机架上设置有顶壁呈水平的停机台,所述机架上设置有用于对所述停机台进行覆盖笼罩的保护罩,所述保护罩上活动安装有用于抵紧停放在所述停机台上的无人机的抵紧杆,所述保护罩上还设置有用于驱动所述抵紧杆运动的驱动机构。
8.通过采用上述技术方案,当无人机停放在停机台上后,保护罩合拢对无人机进行保护,同时驱动机构驱动抵紧杆抵紧无人机对无人机进行固定,使得机架在跳动时无人机不易出现跳动现象,进而使得无人机不易因为碰撞收到损坏。
9.可选的,所述抵紧杆的一端转动安装在所述保护罩上,所述抵紧杆的转动轴线与所述保护罩的转动轴线平行,所述驱动机构包括安装在所述保护罩上的抵紧电机,所述抵紧电机与所述抵紧杆传动连接,所述驱动机构还包括安装在所述保护罩上的用于对所述抵紧杆进行固定的固定件。
10.通过采用上述技术方案,当保护罩合拢时,抵紧电机启动带动抵紧杆转动抵紧停机台上的无人机后停止,然后通过固定件对抵紧杆进行固定,进而对无人机进行固定,使得抵紧杆对无人机抵紧后抵紧电机无需一直得电保持自锁状态,降低了抵紧电机的成本的同时,减少了本技术的停机坪的能耗,提高了续航能力。
11.可选的,所述固定件包括滑移安装在所述保护罩上的固定杆,所述固定杆的轴线与所述抵紧杆的转动轴线平行,当所述抵紧杆抵紧无人机时,所述固定杆可滑移至所述固
定杆的侧壁与所述抵紧杆朝向所述保护罩的一板面抵接,所述保护罩的内壁上安装有第一驱动电机,所述第一驱动电机用于带动所述固定杆滑移。
12.通过采用上述技术方案,当抵紧杆抵紧无人机后,启动第一驱动电机带动固定杆滑移,固定杆滑移至抵紧抵紧杆的侧壁后即可对抵紧杆进行固定,且由于通过固定杆和抵紧杆本身的物理特性进行定位,使得固定杆对抵紧杆的定位较为稳定。
13.可选的,所述第一驱动电机的输出轴上同轴安装有驱动蜗杆,所述保护罩上转动安装有与所述驱动蜗杆啮合的驱动蜗轮,所述驱动蜗轮同轴安装有套筒,所述固定杆的一端穿入到所述套筒内且与所述套筒螺纹配合。
14.通过采用上述技术方案,第一驱动电机通过驱动蜗杆和驱动蜗轮带动固定杆进行移动,通过驱动蜗杆和驱动蜗轮之间的自锁功能,使得固定杆不易出现回退现象,进一步提高了固定杆对抵紧杆的固定稳定性。
15.可选的,所述固定杆背离所述套筒一端的端面呈球状凸起,所述抵紧杆通过弹性材料制成。
16.通过采用上述技术方案,当抵紧杆和固定杆之间的配合出现误差时,通过固定杆的球状凸起端以及具有弹性的抵紧杆之间的配合,使得固定杆可较为稳定地移动至抵紧抵紧杆的板面。
17.可选的,所述抵紧杆背离所述保护罩的一端转动安装有橡胶压辊,所述橡胶压辊的转动轴线与所述抵紧杆的转动轴线平行。
18.通过采用上述技术方案,抵紧杆通过橡胶压辊抵紧无人机,使得抵紧杆抵紧无人机时不易对无人机造成损伤。
19.可选的,所述驱动机构包括安装在所述保护罩的外侧壁上的安装盒,所述安装盒与所述保护罩的内腔连通,所述抵紧杆设置在所述安装盒内,两根所述抵紧杆相互铰接,且任一所述抵紧杆的一端与所述安装盒背离所述保护罩的一侧壁内壁转动连接,所述安装盒背离所述保护罩的一侧壁的内壁上滑移安装有安装块,另一根所述抵紧杆的一端与所述安装块转动连接,推动所述安装块滑移以用于推动两根所述抵紧杆转动,当保护罩合拢时,所述抵紧杆远离所述安装盒的一端伸入至所述保护罩内与无人机的顶壁抵接,所述安装盒内还安装有用于带动所述抵紧杆转动的驱动件。
20.通过采用上述技术方案,当保护罩合拢后,驱动件通过推动安装块滑移带动两根抵紧杆转动,进而通过转动的抵紧杆抵紧无人机对无人机进行固定,且针对不同高度的无人机,通过调节安装块的滑移量可较为方便地调节抵紧杆的抵紧高度。
21.可选的,所述驱动件包括安装在所述安装盒内的第二驱动电机,所述第二驱动电机的输出轴同轴安装有丝杆,所述丝杆穿过所述安装块且与所述安装块螺纹配合,所述丝杆的轴线与所述安装块的滑移方向平行。
22.通过采用上述技术方案,第二驱动电机通过丝杆带动安装块滑移,通通过丝杆和安装块之间的自锁功能使得安装块不易出现滑移现象,提高了安装块的稳定性。
23.可选的,所述安装盒内滑移安装有滑块,所述滑块上安装有停止按钮,所述停止按钮位于所述安装块的滑移路径上,所述停止按钮与所述第二驱动电机电连接,所述滑块的滑移方向与所述安装块的滑移方向平行,所述滑块螺纹安装有用于与所述安装盒之间进行固定的锁定螺栓。
24.通过采用上述技术方案,当安装块滑移至抵紧停止按钮后,第二驱动电机停止,使得工作人员通过调节滑块的位置即可较为方便地调节安装块的移动量。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.当无人机停放在停机台上后,保护罩合拢对无人机进行保护,同时通过驱动机构带动抵紧杆抵紧无人机对无人机进行固定,使得机架在跳动时无人机不易出现跳动现象,进而使得无人机不易因为碰撞收到损坏;
27.2.当保护罩合拢时,抵紧杆在抵紧电机的作用下抵紧停机台上的无人机,然后通过固定件对抵紧杆进行固定,进而对无人机进行固定,且由于结构较为简单,在户外环境比较恶劣的情况下不易出现死机现象;
28.3.当安装块滑移至抵紧停止按钮后,第二驱动电机停止,使得工作人员通过调节滑块的位置即可较为方便地调节安装块的移动量。
附图说明
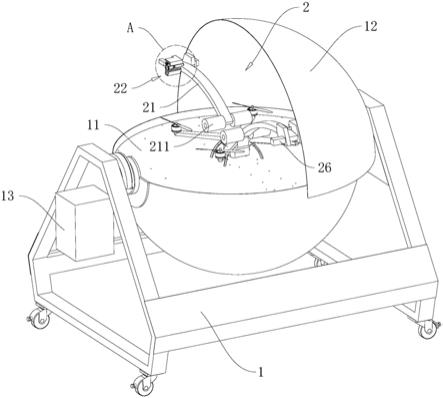
29.图1是本技术实施例1的立体结构示意图。
30.图2是本技术实施例1的立体结构示意图,图中将保护罩、基座剖切。
31.图3是图2中a部的放大示意图。
32.图4是本技术实施例2的立体结构示意图。
33.图5是本技术实施例2的立体结构示意图,图中将保护罩剖切。
34.图6是图5中b部的放大示意图。
35.附图标记:1、机架;11、停机台;12、保护罩;13、动力件;2、驱动机构;21、抵紧杆;211、橡胶压辊;22、固定件;221、固定杆;222、基座;223、驱动蜗杆;224、驱动蜗轮;225、套筒;226、第一驱动电机;23、安装盒;24、安装块;25、驱动件;251、第二驱动电机;252、丝杆;26、抵紧电机;3、滑块;31、停止按钮;32、锁定螺栓。
具体实施方式
36.以下结合附图1-6对本技术作进一步详细说明。
37.本技术实施例1公开一种具有无人机固定装置的停机坪,参照图1和图2,包括机架1,机架1上固定安装有呈半球状的停机台11,停机台11的顶壁呈水平的平面状。机架1上转动安装有呈半球状的保护罩12,与停机台11同轴转动安装在机架1上,保护罩12的半径大于停机台11的半径。机架1上固定安装有用于驱动保护罩12转动的动力件13。
38.参照图1和图2,在保护罩12上设置有驱动机构2,驱动机构2包括两根呈弧形且与保护罩12内壁相贴合的抵紧杆21,抵紧杆21使用工程塑料制成,以保护罩12的转动轴线为分界线,两根抵紧杆21分别对称分布在保护罩12的两侧。抵紧杆21的一端转动安装有基座222,基座222与保护罩12的内壁固定连接,抵紧杆21的另一端上转动安装有两根橡胶压辊211,两根橡胶压辊211分别位于抵紧杆21的两侧且两根橡胶压辊211的轴线与抵紧杆21的转动轴线平行。基座222上固定安装有抵紧电机26,抵紧电机26的输出轴与抵紧杆21的转动轴线同轴且与抵紧杆21固定连接,当保护罩12合拢时,抵紧电机26驱动两根抵紧杆21转动至两根抵紧杆21上的橡胶压辊211抵紧停放在停机台11上的无人机,然后抵紧电机26停止。
39.参照图2和图3,驱动机构2还包括固定件22,固定件22包括两根滑移安装在基座
222上的固定杆221,固定杆221的轴线与抵紧杆21的转动轴线平行,固定杆221沿其轴线方向滑移,且固定杆221朝向抵紧杆21的一端的端面呈半球状凸起。基座222上固定安装有第一驱动电机226,第一驱动电机226的输出轴上同轴固定安装有驱动蜗杆223,基座222内转动安装有驱动蜗轮224,驱动蜗杆223与驱动蜗轮224啮合,驱动蜗轮224上同轴固定安装有套筒225,固定杆221背离抵紧杆21的一端配合穿入到套筒225内且与套筒225螺纹配合。
40.参照图2和图3,当抵紧杆21的橡胶辊抵紧无人机时,第一驱动电机226启动带动驱动蜗杆223转动,继而带动驱动蜗轮224及套筒225转动带动固定杆221滑移。固定杆221可滑移至其的侧壁贴合抵紧抵紧杆21朝向保护罩12的一面上,通过抵紧抵紧杆21板面的固定杆221对抵紧杆21进行固定,进而对无人机进行固定。
41.本技术实施例1一种具有无人机固定装置的停机坪的实施原理为:无人机停在停机平台上后,动力件13带动保护罩12转动合拢,保护罩12完全合拢后,在抵紧电机26的带动下两根抵紧杆21转动至抵紧杆21上的橡胶压辊211抵紧无人机的顶壁,然后启动第一驱动电机226带动固定杆221移动,固定杆221移动至抵紧抵紧杆21朝向保护罩12一侧的板面上后,第一驱动电机226停止,通过固定杆221对抵紧杆21进行限位固定,进而通过抵紧杆21对橡胶压辊211进行固定,通过橡胶压辊211对无人机进行固定。
42.参照图4和图5,本技术实施例2与实施例的不同之处仅在于:驱动机构2包括固定安装在保护罩12外侧壁上的安装盒23,安装盒23具有开口且安装盒23的开口将保护罩12贯穿。安装盒23内设置有两根呈矩形框状的抵紧杆21,两根抵紧杆21的中部相互交错且两根抵紧杆21的交错处相互铰接。任一抵紧杆21的一端与安装盒23的盒底转动连接,另一根抵紧杆21的一端上转动安装有安装块24,安装块24滑移安装在安装盒23的盒底。
43.参照图5和图6,两根抵紧杆21的转动轴线相互平行且与保护罩12的转动轴线平行。当保护罩12合拢后,通过推动安装块24滑移进而带动两根抵紧杆21转动抵紧停机平台上的无人机对无人机进行固定。
44.参照图5和图6,安装盒23内设置有驱动机构2,驱动机构2包括固定安装在安装盒23的盒底上的第二驱动电机251,第二驱动电机251的输出轴上同轴固定安装有一根丝杆252,丝杆252的一端穿过安装块24且与安装块24螺纹配合。丝杆252的轴线与安装块24的滑移方向平行,通过第二驱动电机251带动丝杆252转动进而带动安装块24滑移。
45.参照图5和图6,在安装盒23的盒底上滑移安装有滑块3,滑块3上固定安装有停止按钮31,停止按钮31位于安装块24的滑移轨道上,且停止按钮31与第二驱动电机251电连接,当安装块24滑移至将停止按钮31按下时,第二驱动电机251停止。通过调节滑块3的位置以调节第二驱动电机251的工作时间,进而调节两根抵紧杆21的下端的下降高度以适配不同高度的无人机进行固定。滑块3上还螺纹安装有两个锁定螺栓32,锁定螺栓32的一端穿过滑块3抵紧安装盒23的盒底,通过锁定螺栓32对滑块3进行固定。
46.本技术实施例2一种具有无人机固定装置的停机坪的实施原理为:当保护罩12合拢后,通过启动第二驱动电机251带动安装块24滑移,进而带动两根抵紧杆21转动,当安装块24滑移至将滑块3上的按钮按下后,第二驱动电机251停止,此时抵紧杆21抵紧停机台11上的无人机完成对无人机的固定。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1