一种适用于果树施药的压电超声喷雾式仿形无人机
1.本实用新型涉及农业无人机技术领域,更具体的说是涉及一种适用于果树施药的压电超声喷雾式仿形无人机。
背景技术:
2.中国是世界水果生产大国,但在果树病虫害防治过程中有严重农药施用过量问题,大量农药流失不但防治效率低下,而且造成了环境污染。传统果树施药方式喷雾效率低下,雾滴附着率低、冠层内部难以覆盖。
3.仿形喷雾是一种通过检测果树形状,自动控制喷头距离,提高药液在果树内分布均匀性的一种方法,现阶段普遍用于地面喷施机械。因此,如何提供一种具有仿形功能的自动喷雾的无人机,是本领域技术人员亟需解决的问题。
技术实现要素:
4.有鉴于此,本实用新型提供了一种适用于果树施药的压电超声喷雾式仿形无人机,旨在解决上述技术问题。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.一种适用于果树施药的压电超声喷雾式仿形无人机,包括:无人机本体和仿形折叠臂;
7.所述无人机本体的飞行前端安装有图像采集系统;
8.所述仿形折叠臂的数量至少为两个,且安装在所述无人机本体的两侧;所述仿形折叠臂展开状态时的内侧边沿上安装有多个压电超声雾化喷头。
9.通过上述技术方案,本实用新型通过无人机本体携带图像采集系统确定果树树冠的位置、大小,进而决定仿形折叠臂的仿形喷雾机械形态,压电超声雾化喷头用于将液体雾化后喷出,本实用新型可产生微小雾滴、粒径均匀,在风力的辅助下可穿透树冠,实现果树树冠的高效率施药。
10.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述仿形折叠臂包括基座,以及与所述基座连接的多级杆状的机械臂;所述基座安装在所述无人机本体的侧面;多根所述机械臂的端头通过机械关节件依次转动连接,且多根所述机械臂形成的多级折叠杆体的一端通过转动控制件与所述基座连接。通过转动控制件和机械关节件的配合能够实现多级机械臂的收折和展开,能够实现根据树冠外形形成的仿形控制,结构简单,控制高效。
11.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述机械臂的数量为三根,且分别为一级机械臂、二级机械臂和三级机械臂;所述一级机械臂的一端通过所述转动控制件与所述基座连接;所述二级机械臂的两端均通过所述机械关节件分别与所述一级机械臂和所述三级机械臂连接。三级机械臂结构能够满足仿形的基本需求。
12.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述转动
控制件包括第一步进电机和轴套;所述第一步进电机固定在所述基座内部;所述轴套通过联轴器与所述第一步进电机的动力输出轴连接,所述一级机械臂的端头垂直固定在所述轴套上,所述基座竖向开设有用于避让所述一级机械臂上下转动的避让槽。通过第一步进电机的正反转控制,即可控制一级机械臂的上下转动,进行机械臂的折叠和展开的操控。
13.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述机械关节件包括第二步进电机、u型架和锥齿轮副;所述第二步进电机固定在所述一级机械臂或所述二级机械臂的端头内部,所述u型架的两端端头与所述二级机械臂或所述三级机械臂的端头固定,所述u型架的中间杆插入所述一级机械臂或所述二级机械臂的端头内部,且与其转动连接;所述锥齿轮副包括两个锥齿轮,两个所述锥齿轮分别固定在所述第二步进电机的端头和所述u型架的中间杆上,且相互啮合。通过第二步进电机的正反转控制,即可控制二级机械臂和三级机械臂的上下转动,进行机械臂的折叠和展开的操控。
14.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述压电超声雾化喷头安装在所述二级机械臂和所述三级机械臂上。在二级机械臂和三级机械臂上安装压电超声雾化喷头能够满足喷雾范围,避免无人机本体的位置影响。
15.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述压电超声雾化喷头包括定位座和喷雾头;所述定位座通过定位孔固定在所述二级机械臂和所述三级机械臂上;所述喷雾头固定在所述定位座上,所述喷雾头内部具有液体流道,所述喷雾头端面具有与所述液体流道连通的雾化喷嘴,所述雾化喷嘴通过压电效应将电信号转化为机械振动,并通过机械振动将液体破碎成微小雾滴;所述喷雾头端面具有环绕所述雾化喷嘴的辅助风道,所述喷雾头侧壁具有与所述辅助风道连通的气体入口。由压电超声雾化喷头产生的雾滴粒径在50-100μm之间,可以轻松穿透树冠,在树冠内部的叶片上实现良好附着。
16.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述无人机本体上安装有水箱,所述水箱通过蠕动泵与所述机械臂内部的液体管道连通,所述液体管道与所述液体流道连通;所述无人机本体上还安装气泵,所述气泵与所述机械臂内部的气管连通,所述气管与所述气体入口连通。蠕动泵和气泵为整体结构提供供给动力。
17.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述图像采集系统为双目立体深度相机。双目立体深度相机用于确定果树树冠的位置、大小,进而决定仿形喷雾机械臂的形态。
18.优选的,在上述一种适用于果树施药的压电超声喷雾式仿形无人机中,所述仿形折叠臂的数量为两个,且对称安装在所述无人机本体的两侧。对称布置的仿形折叠臂能够满足仿形控制需求。
19.经由上述的技术方案可知,与现有技术相比,本实用新型公开提供了一种适用于果树施药的压电超声喷雾式仿形无人机,具有以下有益效果:
20.1、压电超声雾化喷头是通过逆压电效应将电信号转化为机械振动,在雾化喷嘴处将液体破碎成细小雾滴。细小雾滴极易蒸发,借助辅助风道的风力让细小雾滴加速运动,减少在空气中的运动时间,快速到达靶标叶面。由压电超声雾化喷头产生的雾滴粒径在50-100μm之间,可以轻松穿透树冠,在树冠内部的叶片上实现良好附着。
21.2、本方案中双目立体深度相机用于识别果树树冠的位置、大小等信息,并回传到
无人机控制中心,无人机控制中心根据识别信息,自动调整仿形喷雾机械臂形态,达到最佳的施药位置。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
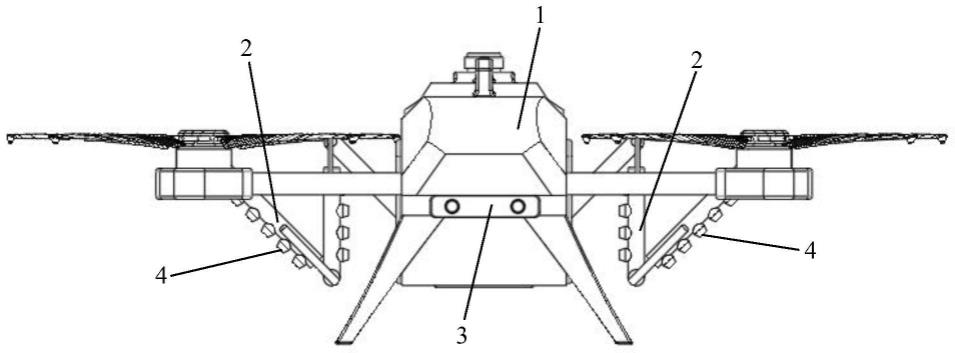
23.图1附图为本实用新型提供的仿形无人机的结构示意图;
24.图2附图为本实用新型提供的仿形折叠臂的结构示意图;
25.图3附图为本实用新型提供的转动控制件的结构示意图;
26.图4附图为本实用新型提供的机械关节件的结构示意图;
27.图5附图为本实用新型提供的压电超声雾化喷头的结构示意图。
28.其中:
29.1-无人机本体;
30.2-仿形折叠臂;
31.21-基座;211-避让槽;22-机械关节件;221-第二步进电机;222-u型架;223-锥齿轮副;23-转动控制件;231-第一步进电机;232-轴套;233
‑ꢀ
联轴器;24-一级机械臂;25-二级机械臂;26-三级机械臂;
32.3-图像采集系统;
33.4-压电超声雾化喷头;
34.41-定位座;411-定位孔;42-喷雾头;421-雾化喷嘴;422-辅助风道;
35.423-气体入口。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.参见附图1,本实用新型实施例公开了一种适用于果树施药的压电超声喷雾式仿形无人机,包括:无人机本体1和仿形折叠臂2;
38.无人机本体1的飞行前端安装有图像采集系统3;
39.仿形折叠臂2的数量至少为两个,且安装在无人机本体1的两侧;仿形折叠臂2展开状态时的内侧边沿上安装有多个压电超声雾化喷头4。
40.参见附图2,仿形折叠臂2包括基座21,以及与基座21连接的多级杆状的机械臂;基座21安装在无人机本体1的侧面;多根机械臂的端头通过机械关节件22依次转动连接,且多根机械臂形成的多级折叠杆体的一端通过转动控制件23与基座21连接。
41.为了进一步优化上述技术方案,机械臂的数量为三根,且分别为一级机械臂24、二级机械臂25和三级机械臂26;一级机械臂24的一端通过转动控制件23与基座21连接;二级
机械臂25的两端均通过机械关节件22分别与一级机械臂24和三级机械臂26连接。
42.参见附图3,转动控制件23包括第一步进电机231和轴套232;第一步进电机231固定在基座21内部;轴套232通过联轴器233与第一步进电机231 的动力输出轴连接,一级机械臂24的端头垂直固定在轴套232上,基座21 竖向开设有用于避让一级机械臂24上下转动的避让槽211。
43.参见附图4,机械关节件22包括第二步进电机221、u型架222和锥齿轮副223;第二步进电机221固定在一级机械臂24或二级机械臂25的端头内部,u型架222的两端端头与二级机械臂25或三级机械臂26的端头固定,u 型架222的中间杆插入一级机械臂24或二级机械臂25的端头内部,且与其转动连接;锥齿轮副223包括两个锥齿轮,两个锥齿轮分别固定在第二步进电机221的端头和u型架222的中间杆上,且相互啮合。
44.为了进一步优化上述技术方案,压电超声雾化喷头4安装在二级机械臂 25和三级机械臂26上。
45.参见附图5,压电超声雾化喷头4包括定位座41和喷雾头42;定位座41 通过定位孔411固定在二级机械臂25和三级机械臂26上;喷雾头42固定在定位座41上,喷雾头42内部具有液体流道,喷雾头42端面具有与液体流道连通的雾化喷嘴421,雾化喷嘴421通过压电效应将电信号转化为机械振动,并通过机械振动将液体破碎成微小雾滴;喷雾头42端面具有环绕雾化喷嘴421 的辅助风道422,喷雾头42侧壁具有与辅助风道422连通的气体入口423。
46.为了进一步优化上述技术方案,无人机本体1上安装有水箱,水箱通过蠕动泵与机械臂内部的液体管道连通,液体管道与液体流道连通;无人机本体1上还安装气泵,气泵与机械臂内部的气管连通,气管与气体入口423连通。
47.为了进一步优化上述技术方案,图像采集系统3为双目立体深度相机。
48.为了进一步优化上述技术方案,仿形折叠臂2的数量为两个,且对称安装在无人机本体1的两侧。
49.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
50.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1