多地形起落救援无人机
1.本实用新型涉及无人机技术领域,具体为多地形起落救援无人机。
背景技术:
2.无人机是利用无线电遥控设备或自备的程序控制装置操纵的不载人飞行器,目前无人机应用广泛,在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域都应用良好。
3.目前现有的无人机的螺旋桨不便于折叠,使得无人机在运输时占用的空间较大,从而不便于对无人机进行运输,并且现有的无人机螺旋桨缺少相应的调节功能,这就导致无人机在飞行时易受到场地的宽度限制,严重影响无人机的工作效率;
4.现有的无人机只能降落在平整的路面上,在面对崎岖不平的道路时,现有的无人机无法满足使用。
5.为此,我们提出多地形起落救援无人机。
技术实现要素:
6.本实用新型的目的在于提供多地形起落救援无人机,以解决上述背景技术中提出的目前现有的无人机的螺旋桨不便于折叠,使得无人机在运输时占用的空间较大,从而不便于对无人机进行运输,并且现有的无人机螺旋桨缺少相应的调节功能,这就导致无人机在飞行时易受到场地的宽度限制,严重影响无人机的工作效率;
7.现有的无人机只能降落在平整的路面上,在面对崎岖不平的道路时,现有的无人机无法满足使用的问题。
8.为实现上述目的,本实用新型提供如下技术方案:
9.多地形起落救援无人机,包括:
10.无人机底盘、以及安装于无人机底盘底部的摄像头、固定连接在无人机底盘表面的第一顶板,所述第一顶板表面转动连接有活动柱,所述活动柱远离第一顶板的一端转动连接有第二顶板,所述第二顶板表面安装有天线;
11.所述活动柱外壁上固定连接有驱动臂,所述驱动臂表面安装有螺旋桨;
12.所述第一顶板底部设置有折叠机构;
13.所述无人机底盘外壁上安装有连接臂,所述连接臂底部设置有支撑机构。
14.作为本实用新型的进一步方案,所述折叠机构包括安装在第一顶板底部的驱动电机,所述驱动电机的输出端朝上并固定连接有活动贯穿第一顶板并延伸至第一顶板表面的驱动齿轮;
15.所述驱动齿轮的底部与第一顶板的表面非接触。
16.作为本实用新型的进一步方案,所述第一顶板表面转动连接有连接齿轮,所述连接齿轮与驱动齿轮相啮合,所述连接齿轮表面固定连接有连接套筒。
17.作为本实用新型的进一步方案,所述活动柱外壁上固定连接有被接套筒,所述被
接套筒、连接套筒外壁上套接有同步带。
18.作为本实用新型的进一步方案,所述支撑机构包括锥架,所述锥架固定连接在连接臂底部,所述锥架的内顶部安装有伺服电机,所述伺服电机的输出端朝下并配合联轴器连接有丝杆。
19.作为本实用新型的进一步方案,所述丝杆的外壁上安装有移动轴套,所述移动轴套外壁上活动连接有连接条,所述连接条远离移动轴套的一端活动连接有支撑条;
20.所述支撑条的底部铰接在锥架的内底部。
21.作为本实用新型的进一步方案,所述锥架的底部固定连接有压缩弹簧,所述压缩弹簧远离锥架底部的一端固定连接有缓冲接地座;
22.所述缓冲接地座活动套设于锥架的外部。
23.与现有技术相比,本实用新型的有益效果是:
24.本实用新型通过启动驱动电机,驱动电机带动驱动齿轮进行相应的转动,驱动齿轮再带动连接齿轮进行转动,连接齿轮通过连接套筒配合同步带再带动被接套筒、驱动臂、螺旋桨进行相应的转动,相比较现有的,本实用新型通过对驱动臂、螺旋桨进行一定程度的旋转,一方面便于对驱动臂、螺旋桨进行折叠收纳,降低了驱动臂、螺旋桨在运输时所占用的空间,从而便于对无人机进行运输,另一方面通过对驱动臂、螺旋桨进行折叠可以对螺旋桨之间的距离进行调整,使得无人机可以满足不同飞行场地、环境下使用,使得无人机的适用范围更广,有利于提高无人机的工作效率。
25.本实用新型通过启动伺服电机,伺服电机带动丝杆进行工作,此时移动轴套会在丝杆上进行下降移动,当移动轴套在丝杆上进行下降移动时会通过连接条将支撑条进行撑开,相比较现有的,本实用新型通过设置有支撑条,在支撑条的配合下可以增大无人机与地面的接触面积,从而提高无人机降落的稳定性,使得无人机可以满足不同类型的地面降落使用,能够满足现有的需要。
附图说明
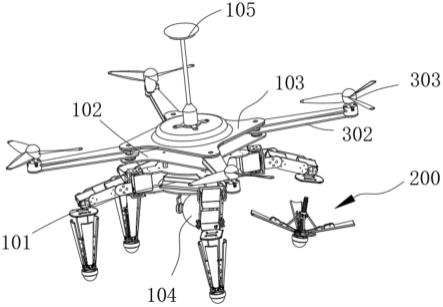
26.图1为本实用新型的立体结构示意图;
27.图2为本实用新型的部分结构示意图;
28.图3为本实用新型图2中a处放大结构示意图;
29.图4为本实用新型中的支撑结构示意图。
30.图中:101、无人机底盘;102、第一顶板;103、第二顶板;104、摄像头;105、天线;106、连接臂;107、活动柱;200、支撑机构; 201、锥架;202、伺服电机;203、丝杆;204、移动轴套;205、连接条;206、支撑条;207、压缩弹簧;208、缓冲接地座;300、折叠机构;301、同步带;302、驱动臂;303、螺旋桨;304、驱动齿轮; 305、连接齿轮;306、连接套筒。
具体实施方式
31.实施例1:
32.请参阅图1-3,本实用新型提供一种技术方案:多地形起落救援无人机,包括无人机底盘101、以及安装于无人机底盘101底部的摄像头104、固定连接在无人机底盘101表面的第一顶板102,第一顶板102表面转动连接有活动柱107,活动柱107远离第一顶板102的一
端转动连接有第二顶板103,第二顶板103表面安装有天线105;活动柱107外壁上固定连接有驱动臂302,驱动臂302表面安装有螺旋桨303;第一顶板102底部设置有折叠机构300,折叠机构300包括安装在第一顶板102底部的驱动电机,驱动电机的输出端朝上并固定连接有活动贯穿第一顶板102并延伸至第一顶板102表面的驱动齿轮304;驱动齿轮304的底部与第一顶板102的表面非接触,第一顶板102表面转动连接有连接齿轮305,连接齿轮305与驱动齿轮304 相啮合,连接齿轮305表面固定连接有连接套筒306,活动柱107外壁上固定连接有被接套筒,被接套筒、连接套筒306外壁上套接有同步带301。
33.具体的,通过启动驱动电机,驱动电机带动驱动齿轮304进行相应的转动,驱动齿轮304再带动连接齿轮305进行转动,连接齿轮 305通过连接套筒306配合同步带301再带动被接套筒、驱动臂302、螺旋桨303进行相应的转动,相比较现有的,本实用新型通过对驱动臂302、螺旋桨303进行一定程度的旋转,一方面便于对驱动臂302、螺旋桨303进行折叠收纳,降低了驱动臂302、螺旋桨303在运输时所占用的空间,从而便于对无人机进行运输,另一方面通过对驱动臂 302、螺旋桨303进行折叠可以对螺旋桨303之间的距离进行调整,使得无人机可以满足不同飞行场地、环境下使用,使得无人机的适用范围更广,有利于提高无人机的工作效率;
34.其次驱动臂302上安装有抱闸机构,抱闸机构能够提高驱动臂 302、螺旋桨303的稳定性,有利于提高了无人机的飞行平稳。
35.实施例2:
36.请参阅图1、2、4,本实用新型提供一种技术方案:多地形起落救援无人机,无人机底盘101外壁上安装有连接臂106,连接臂106 底部设置有支撑机构200,支撑机构200包括锥架201,锥架201固定连接在连接臂106底部,锥架201的内顶部安装有伺服电机202,伺服电机202的输出端朝下并配合联轴器连接有丝杆203,丝杆203 的外壁上安装有移动轴套204,移动轴套204外壁上活动连接有连接条205,连接条205远离移动轴套204的一端活动连接有支撑条206;支撑条206的底部铰接在锥架201的内底部,锥架201的底部固定连接有压缩弹簧207,压缩弹簧207远离锥架201底部的一端固定连接有缓冲接地座208;缓冲接地座208活动套设于锥架201的外部。
37.具体的,通过启动伺服电机202,伺服电机202带动丝杆203进行工作,此时移动轴套204会在丝杆203上进行下降移动,当移动轴套204在丝杆203上进行下降移动时会通过连接条205将支撑条206 进行撑开,相比较现有的,本实用新型通过设置有支撑条206,在支撑条206的配合下可以增大无人机与地面的接触面积,从而提高无人机降落的稳定性,使得无人机可以满足不同类型的地面降落使用,能够满足现有的需要;
38.其次通过设置有压缩弹簧207和缓冲接地座208,当无人机在降落时,在压缩弹簧207与缓冲接地座208的配合下可以对无人机所受到地面的冲击力进行削弱和缓冲,可有效缓解无人机在降落时所受到的振动,从而避免了无人机受到损坏,提高了无人机的使用寿命,整体的安全性较高。
39.工作原理:对于本实用新型,在使用时,首先在需要进行无人机进行运输时,使用者可以通过启动驱动电机,驱动电机带动驱动齿轮 304进行相应的转动,驱动齿轮304再带动连接齿轮305进行转动,连接齿轮305通过连接套筒306配合同步带301再带动被接套筒、驱动臂302、螺旋桨303进行相应的转动,通过对驱动臂302、螺旋桨 303进行一定程度的旋
转,一方面便于对驱动臂302、螺旋桨303进行折叠收纳,降低了驱动臂302、螺旋桨303在运输时所占用的空间,从而便于对无人机进行运输,另一方面,在无人机执行飞行任务时,通过对驱动臂302、螺旋桨303进行折叠可以对螺旋桨303之间的距离进行调整,使得无人机可以满足不同飞行场地、环境下使用,使得无人机的适用范围更广,有利于提高无人机的工作效率;
40.其次在无人机需要进行降落时,此时使用者通过启动伺服电机 202,伺服电机202带动丝杆203进行工作,此时移动轴套204会在丝杆203上进行下降移动,当移动轴套204在丝杆203上进行下降移动时会通过连接条205将支撑条206进行撑开,通过设置有支撑条 206,在支撑条206的配合下可以增大无人机与地面的接触面积,从而提高无人机降落的稳定性,使得无人机可以满足不同类型的地面降落使用,能够满足现有的需要;
41.最后通过设置有压缩弹簧207和缓冲接地座208,当无人机在降落时,在压缩弹簧207与缓冲接地座208的配合下可以对无人机所受到地面的冲击力进行削弱和缓冲,可有效缓解无人机在降落时所受到的振动,从而避免了无人机受到损坏,提高了无人机的使用寿命,整体的安全性较高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1