一种智能探测报警无人机设备的制作方法
1.本实用新型属于无人机探测设备技术领域,尤其涉及一种智能探测报警无人机设备。
背景技术:
2.智能探测报警无人机常应用于矿井火灾救援,矿井火灾是煤矿生产的五大灾害之一。矿井火灾的主要危害包括:产生大量的有害气体、产生高温、引起瓦斯和粉尘爆炸、毁坏设备和资源。煤矿火灾一旦发生,火灾蔓延速度快,难以控制,甚至会引起煤尘和瓦斯爆炸,造成难以预计的损失。矿井发生火灾后,受煤矿井巷空间狭小限制,人员的撤离、躲避及救援难度很大,而快速的掌握火灾现场的灾情是救援、控制火灾的重要保障。每个煤矿生产单位都制定严格的煤矿火灾预防措施,煤矿发生火灾后往往都能够控制火灾向其它巷道的蔓延,但由于矿井火灾产生大量的有毒气体及高温在井巷扩散的速度快、距离长,这对井下人员的危害极大,因此,必须对火灾现场及周围巷道环境有精准的掌握,才能保障救援人员安全,并推进救援工作的快速开展。当前智能探测报警无人机的出现可实现远程、无人控制的对一氧化碳浓度、烟雾量以及粉尘量等数据的探测,还能够通过搭载摄像头实现对视频数据的的采集和无线传输,这为矿井火灾的救援带来了非常大的便利,研究发现无人机搭载摄像头在烟尘浓度较高的环境下工作时,烟尘会粘附聚集在用于保护镜头的uv镜片上,当uv镜片上烟尘过多时,会对摄像头进行遮挡,严重影响摄像头视频数据的采集工作,直接导致对矿井巷道环境难以精准掌握,使救援工作陷入被动。
技术实现要素:
3.针对现有技术不足,本实用新型的目的在于提供一种智能探测报警无人机设备,用以解决背景技术中提出的技术问题。
4.本实用新型提供如下技术方案:
5.一种智能探测报警无人机设备,包括外壳,所述外壳呈空心圆柱形,所述外壳的上端面竖直向上且同轴设置有用于与无人机连接支架连接的连接杆,所述外壳的侧面设置有摄像头安装口,所述外壳的侧面位于所述摄像头安装口处设置有防护镜片,所述连接杆上设置有用于清扫所述防护镜片外侧面的清理机构,所述清理机构包括清理面,所述清理面与所述防护镜片外侧面接触并发生相对运动,所述清理面呈步进式圆周运动。
6.优选的,所述防护镜片通过螺旋连接件与所述外壳进行连接,所述螺旋连接件包括连接内管和连接外管,所述连接内管设置在所述外壳的外侧面位于所述摄像头安装口处,所述摄像头安装口位于连接内管内部,所述防护镜片嵌套在所述连接外管远离外壳的一端,所述连接内管的外侧设置有外螺纹,所述连接外管的内侧设置有与所述外螺纹相适配的内螺纹。
7.优选的,所述防护镜片为uv镜片。
8.优选的,所述清理机构还包括环形平行板,所述环形平行板的内圈同轴设置有套
筒,所述套筒的内圈同轴设置有轴承,所述轴承的内圈套接在所述连接杆上,所述清理面与所述环形平行板的边缘连接,所述外壳的上端面设置有用于使环形平行板圆周转动的驱动件。
9.优选的,所述清理面包括多个刷毛,多个所述刷毛呈阵列式均匀分布,多个所述刷毛靠近外壳的一端共同形成清理面,多个所述刷毛的另一端通过连接件与所述环形平行板的边缘连接。
10.优选的,所述连接件包括连接板,多个所述刷毛远离外壳的一端呈阵列式均匀设置在连接板靠近外壳的一侧面上,所述连接板的另一侧通过卡合件与所述环形平行板的边缘连接。
11.优选的,所述卡合件包括竖板,所述竖板的上端垂直设置在所述环形平行板下端面的边缘处,所述竖板的下端沿其纵向方向设置有卡合槽,所述连接板远离外壳的一侧面设置有与所述卡合槽相适配的卡合块,所述竖板的下端位于所述卡合槽处还设置有用于固定所述卡合块的固定螺栓。
12.优选的,所述驱动件包括步进电机,所述步进电机的缸体部与外壳的上端面垂直连接,所述步进电机的转轴上同轴设置有外齿轮,所述环形平行板的下端面设置有与所述外齿轮相适配的环形内齿条,所述环形内齿条与所述环形平行板同轴设置。
13.优选的,所述摄像头安装口的数量设置有六个,六个所述摄像头安装口沿所述外壳的外周壁周向均布设置。
14.优选的,所述清理面的数量也设置有六个,六个所述清理面沿所述环形平行板下端面的边缘周向均布设置。
15.与现有技术相比,本实用新型具有以下有益效果:
16.本实用新型一种智能探测报警无人机设备,通过对现有的智能探测报警无人机设备进行改进,即在外壳的每个防护镜片处分别设置有用于清扫的清理面,并通过步进电机步进式带动清理面实现一定角度的圆周转动,当清理面扫过防护镜片时,防护镜片上聚集的烟尘能够被清理面清扫,一次清扫完毕后清理面能够暂时停留在两个防护镜片之间位置,不耽误摄像头的视频数据采集,为救援工作带来便利。
附图说明
17.为了更清楚地说明本实用新型实施方式的技术方案,下面将实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
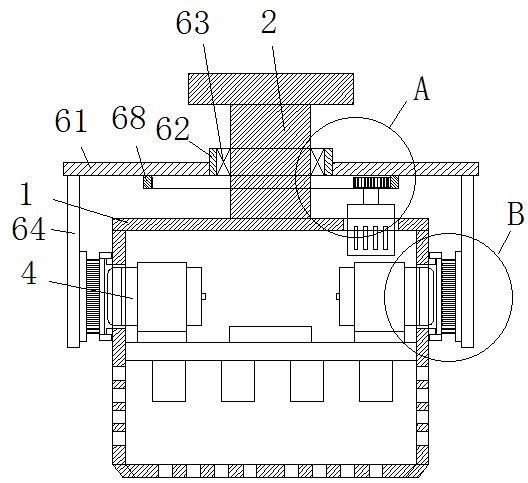
18.图1为本实用新型的结构示意图。
19.图2为本实用新型的图1的a处局部放大示意图。
20.图3为本实用新型的图1的b处局部放大示意图。
21.图4为本实用新型的驱动件结构示意图。
22.图5为本实用新型的清理机构结构示意图。
23.图6为本实用新型的多个清理机构分布示意图。
具体实施方式
24.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
25.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
26.实施例1
27.请参阅图1-5所示,一种智能探测报警无人机设备,包括外壳1,所述外壳1呈空心圆柱形,所述外壳1的上端面竖直向上且同轴设置有用于与无人机连接支架连接的连接杆2,所述外壳1的侧面设置有摄像头安装口3,所述外壳1的侧面位于所述摄像头安装口3处设置有防护镜片5,所述连接杆2上设置有用于清扫所述防护镜片5外侧面的清理机构6,所述清理机构6包括清理面,所述清理面与所述防护镜片5外侧面接触并发生相对运动,所述清理面呈步进式圆周运动。清理面在经过防护镜片时能够对防护镜片的外侧面进行清理,扫去上面粘附的烟尘。
28.智能探测报警无人机设备为现有技术,通过对现有的智能探测报警无人机设备进行改进,即在外壳的每个防护镜片处分别设置有用于清扫的清理面,并通过步进电机步进式带动清理面实现一定角度的圆周转动,当清理面扫过防护镜片时,防护镜片上聚集的烟尘能够被清理面清扫,一次清扫完毕后清理面能够暂时停留在两个防护镜片之间位置,不耽误摄像头的视频数据采集,为救援工作带来便利。
29.所述防护镜片5通过螺旋连接件与所述外壳1进行连接,所述螺旋连接件包括连接内管和连接外管,所述连接内管设置在所述外壳1的外侧面位于所述摄像头安装口3处,所述摄像头安装口3位于连接内管内部,所述防护镜片5嵌套在所述连接外管远离外壳的一端,所述连接内管的外侧设置有外螺纹,所述连接外管的内侧设置有与所述外螺纹相适配的内螺纹。方便对防护镜片的安装和更换。
30.所述防护镜片5为uv镜片。
31.所述清理机构6还包括环形平行板61,所述环形平行板61的内圈同轴设置有套筒62,所述套筒62的内圈同轴设置有轴承63,所述轴承63的内圈套接在所述连接杆2上,所述清理面与所述环形平行板61的边缘连接,所述外壳1的上端面设置有用于使环形平行板61圆周转动的驱动件。环形平行板的工作方式为步进式的圆周转动。
32.所述清理面包括多个刷毛66,多个所述刷毛66呈阵列式均匀分布,多个所述刷毛66靠近外壳1的一端共同形成清理面,多个所述刷毛66的另一端通过连接件与所述环形平行板61的边缘连接。所述刷毛由软胶材料制得,直径为70-90微米,长度为2-5厘米。软胶材质刷毛在对防护镜片发生摩擦时能够降低对防滑镜片的刮伤,在实现清理的同时很好的对防护镜片进行保护。
33.所述连接件包括连接板65,多个所述刷毛66远离外壳1的一端呈阵列式均匀设置
在连接板65靠近外壳1的一侧面上,所述连接板65的另一侧通过卡合件与所述环形平行板61的边缘连接。
34.所述卡合件包括竖板64,所述竖板64的上端垂直设置在所述环形平行板61下端面的边缘处,所述竖板64的下端沿其纵向方向设置有卡合槽,所述连接板65远离外壳的一侧面设置有与所述卡合槽相适配的卡合块8,所述竖板64的下端位于所述卡合槽处还设置有用于固定所述卡合块8的固定螺栓9。卡合块能够从竖板的下端放入卡合槽内,并通过固定螺栓将卡合块固定在卡合槽内,方便对刷毛的清理和更换。
35.所述驱动件包括步进电机67,所述步进电机67的缸体部与外壳的上端面垂直连接,所述步进电机67的转轴上同轴设置有外齿轮69,所述环形平行板61的下端面设置有与所述外齿轮69相适配的环形内齿条68,所述环形内齿条68与所述环形平行板61同轴设置。通过步进电机的每次工作,都能够带动外齿轮转动一定角度,进而带动环形内齿条转动一定的角度,进而带动环形平行板、刷毛转动一定角度。
36.实施例2
37.请参阅图1-6所示,在实施例1的基础上,所述摄像头安装口3的数量设置有六个,六个所述摄像头安装口3沿所述外壳1的外周壁周向均布设置。
38.所述清理面的数量也设置有六个,六个所述清理面沿所述环形平行板61下端面的边缘周向均布设置。
39.通过步进电机的每次工作,都能够带动外齿轮转动一定角度,进而带动环形内齿条转动60度,进而带动环形平行板、刷毛转动60度。步进电机的工作间隔为5-20秒。
40.工作原理:使用时,外壳通过连接杆上端与无人机进行连接,远程操控无人机带动外壳进入矿井进行探测,清理面初始位置位于两个防护镜片之间位置(如图6),不妨碍摄像头的工作,通过步进电机的每次工作,都能够带动外齿轮转动一定角度,进而带动环形内齿条转动60度,进而带动环形平行板、刷毛转动60度,清理面在经过防护镜片时能够对防护镜片的外侧面进行清理,扫去上面粘附的烟尘。
41.以上所述,仅为本实用新型的优选实施方式而已,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1