一种固定翼无人机蜂巢系统
1.本实用新型涉及无人机领域,具体地说是一种固定翼无人机蜂巢系统。
背景技术:
2.固定翼无人机在海洋或陆地的环境监测、测绘、巡逻救援等领域有极其重要的作用,在环境监测等应用场景中,由于其他工具的运动速度和机动性能力限制,很难在短时间内进行大范围的环境覆盖式监测,而固定翼无人机具有速度快、机动性强、活动范围大、续航时间长等优点,可以快速地进行大范围覆盖式环境监控,特别是当多架无人机同时协同作业时,可极大地提高作业效率,另外固定翼无人机技术相对成熟,研制成本低,具有占用空间小等优势,已经得到广泛应用。但现有技术中,能够适应多架无人机起飞和回收存放的平台技术还不成熟,如果能将固定翼无人机与相关平台结合起来以解决多架固定翼无人机起降适配性等问题,将极大地拓展无人机应用范围,有极大的研究价值。
技术实现要素:
3.本实用新型的目的在于提供一种固定翼无人机蜂巢系统,解决了固定翼无人机集群在复杂环境作业时遇到的诸如长距离运输、平台部署、设备维护等环境适应性问题,并且能够实现无人机弹射释放和回收作业的灵活切换。
4.本实用新型的目的是通过以下技术方案来实现的:
5.一种固定翼无人机蜂巢系统,包括贮存保障舱组、气动弹射系统、拦阻索组件、拦阻缓冲网组件和转运机构,其中拦阻索组件设于贮存保障舱组前端上侧,气动弹射系统设于贮存保障舱组前部上侧,贮存保障舱组后部上侧设有安装架体,且拦阻缓冲网组件设于安装架体下端内,转运机构设于安装架体上端,拦阻索组件设有高度和张力均可调的拦阻索,并且拦阻索组件通过设于贮存保障舱组前端的倒伏驱动装置驱动倒伏收起,拦阻缓冲网组件设有可移动收起的拦阻缓冲网,转运机构包括机械手组件以及具有x向和y向移动自由度的转运座,且所述机械手组件安装于所述转运座上,贮存保障舱组包括保障舱和无人机贮存架,且所述无人机贮存架分别放置于对应的保障舱中,无人机通过所述机械手组件抓取转移。
6.所述机械手组件包括y向旋转关节、x向旋转关节、升降臂、转盘和机械手,其中y向旋转关节安装于所述转运座上,x向旋转关节安装于所述y向旋转关节的旋转驱动端,在所述x向旋转关节的旋转驱动端设有升降安装座,所述升降安装座上设有升降臂和升降驱动组件,且所述升降臂通过所述升降驱动组件驱动升降,所述升降臂下端设有转盘安装座,在所述转盘安装座上设有转盘和转盘电机,且所述转盘通过所述转盘电机驱动旋转,所述转盘下侧设有机械手,所述安装架体上设有视觉捕捉相机。
7.所述气动弹射系统包括气动弹射器缸体、气泵和弹射控制组件,其中所述弹射控制组件包括电磁换向阀、开关阀和气压控制开关,气压控制开关安装于气泵上,且所述气泵通过气路与所述电磁换向阀相连,在所述气路上设有开关阀,所述电磁换向阀输出侧的第
一端口通过气管与气动弹射器缸体前端连接、第二端口通过气管与气动弹射器缸体后端连接。
8.所述拦阻索组件包括立架、拦阻索、拦阻索高度调节组件和张紧装置,其中立架下端铰接安装于贮存保障舱组两侧并通过对应侧的倒伏驱动装置支撑,所述立架上设有拦阻索高度调节组件,所述立架下端设有张紧装置,其中所述拦阻索高度调节组件设有沿着对应立架升降的高度调节支座,且所述拦阻索两端分别绕过对应侧的高度调节支座后缠绕于对应侧的张紧装置中。
9.所述拦阻索高度调节组件包括高度调节电机和丝杠,所述高度调节支座设有丝母套套装于所述丝杠上,所述丝杠通过所述高度调节电机驱动转动,所述高度调节支座上设有转向轮和夹紧装置,且拦阻索绕过所述转向轮并穿过所述夹紧装置后缠绕于对应的张紧装置上。
10.所述张紧装置包括张紧电机和绕索盘,其中绕索盘安装于所述张紧电机的输出轴上,拦阻索缠绕于所述绕索盘上。
11.所述拦阻缓冲网组件设有缓冲网驱动组件,所述缓冲网驱动组件包括缓冲网支撑杆、驱动线电机、驱动线和驱动滑套,其中所述安装架体两侧设有缓冲网支撑杆,所述缓冲网支撑杆上设有多个支撑滑套,所述拦阻缓冲网两侧分别安装于对应侧的各个支撑滑套上,所述安装架体一端设有驱动线电机,且所述驱动线电机的输出轴上设有主动轮,所述安装架体另一端设有从动轮,所述驱动线一端绕过所述主动轮,另一端绕过所述从动轮,所述缓冲网支撑杆靠近所述从动轮一端套装有驱动滑套,且所述驱动滑套与所述驱动线固连,并且所述驱动滑套与各个支撑滑套依次通过连接线串联。
12.所述转运机构包括y向驱动组件和x向驱动组件,其中所述安装架体两侧上端均设有上梁,所述y向驱动组件安装于对应侧的上梁上,所述y向驱动组件包括y向移动座,且所述x向驱动组件两端分别安装于对应侧的y向移动座上,所述x向驱动组件包括x向移动座,且所述转运座设于所述x向移动座上。
13.所述无人机贮存架下端设有可移动的配重底盘,所述无人机贮存架上端设有可升降的无人机存放台,所述无人机贮存架内部设有存放台升降驱动装置,且所述存放台升降驱动装置下端与所述配重底盘固连、上端与所述无人机存放台固连。
14.所述保障舱上设有可开启的舱门,相邻保障舱之间设有中央平台,且所述气动弹射系统设于所述中央平台上。
15.本实用新型的优点与积极效果为:
16.1、本实用新型将拦阻索组件、拦阻缓冲网组件、机械手组件、转运机构等集成于贮存保障舱组上,从而使本实用新型可以实现整体移动,解决了固定翼无人机集群在复杂环境作业时遇到的诸如长距离运输、平台部署、设备维护等环境适应性问题。
17.2、本实用新型的机械手组件包括升降臂和多个旋转关节,其可以配合视觉捕捉相机和控制系统调整无人机姿态,既可以满足无人机弹射释放时的无人机姿态要求,又可以满足无人机回收存放时的无人机姿态要求。
18.3、本实用新型的气动弹射系统、拦阻索组件、拦阻缓冲网组件、转运机构等部分结构布局紧凑,能够集成于贮存保障舱组上,并且气动弹射系统可满足无人机的起飞要求,而在无人机弹射起飞时,拦阻索组件处于倒伏状态,拦阻缓冲网组件中的拦阻缓冲网处于收
起状态,不会影响无人机抓取起飞,而在无人机回收时,拦阻索组件通过倒伏驱动装置驱动立起,同时拦阻缓冲网组件中的拦阻缓冲网展开,因此本实用新型可根据需要实现无人机弹射释放和无人机回收两种作业状态的灵活转换,相比于现有技术中无人机平台的单一作业,本实用新型使用的灵活性和适用性均大大提高。
附图说明
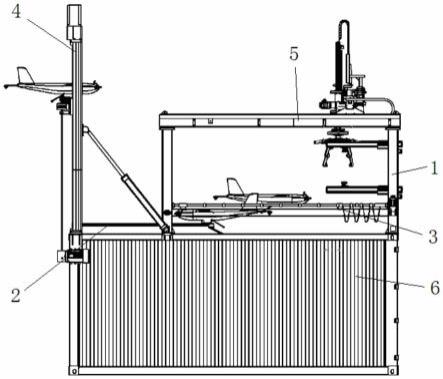
19.图1为本实用新型的主视图,
20.图2为图1中的气动弹射系统结构示意图,
21.图3为图2中的气动控制模块原理示意图,
22.图4为图1中的拦阻索组件和拦阻缓冲网组件位置关系示意图,
23.图5为图4中的拦阻索组件结构示意图,
24.图6为图4中的拦阻缓冲网组件结构示意图,
25.图7为图1中的转运机构结构示意图,
26.图8为图7中的机械手组件结构示意图,
27.图9为图8中的机械手组件工作状态示意图,
28.图10为图1中的贮存保障舱组另一角度结构示意图,
29.图11为图10中的贮存保障舱组内部结构主视图。
30.其中,1为安装架体,101为上梁,102为侧梁,103为安装梁,2为气动弹射系统,201为气动弹射器缸体,202为气管,203为前脚架,204为气泵,205为后支腿,206为电磁换向阀,207为开关阀,208为气压控制开关,3为拦阻缓冲网组件,301为缓冲网支撑杆,302为驱动线电机,303为驱动线,304为支撑滑套,305为驱动滑套,306为从动轮,4为拦阻索组件,401为立架,402为拦阻索,403为高度调节支座,4031为转向轮,4032为夹紧装置,4033为丝母套,404为张紧装置,4041为绕索盘,4042为张紧电机,405为倒伏驱动装置,4051为前铰座,4052为后铰座,406为丝杠,407为高度调节电机,5为转运机构,501为y向驱动组件,502为x向驱动组件,503为视觉捕捉相机,504为机械手组件,5041为升降臂,5042为转盘,5043为机械手,5044为y向旋转关节,5045为x向旋转关节,5046为转盘电机,505为视觉定位模块,506为照明装置,6为贮存保障舱组,601为保障舱,602为中央平台,603为无人机贮存架,604为无人机存放台,605为存放台升降驱动装置,606为固定座,607为配重底盘,608为滚轮。
具体实施方式
31.下面结合附图对本实用新型作进一步详述。
32.如图1~11所示,本实用新型包括贮存保障舱组6、气动弹射系统2、拦阻索组件4、拦阻缓冲网组件3和转运机构5,其中如图1所示,所述拦阻索组件4设于贮存保障舱组6前端上侧,所述气动弹射系统2设于贮存保障舱组6前部上侧,所述贮存保障舱组6后部上侧设有安装架体1,且所述拦阻缓冲网组件3设于所述安装架体1下端内,所述转运机构5设于所述安装架体1上端,如图4~5所示,所述拦阻索组件4设有高度和张力均可调的拦阻索402,并且所述拦阻索组件4可通过设于所述贮存保障舱组6前端两侧的倒伏驱动装置405驱动倒伏收起,如图4和图6所示,所述拦阻缓冲网组件3包括拦阻缓冲网和缓冲网驱动组件,且所述拦阻缓冲网通过所述缓冲网驱动组件驱动移动实现打开或收起,如图7~9所示,所述转运
机构5包括机械手组件504以及具有x向和y向移动自由度的转运座,且所述机械手组件504安装于所述转运座上,如图10~11所示,所述贮存保障舱组6包括保障舱601和无人机贮存架603,且所述无人机贮存架603分别放置于对应的保障舱601中,如图10所示,回收时无人机通过所述拦阻索组件4和拦阻缓冲网组件3拦阻后停止,然后所述机械手组件504抓取无人机后放置于对应的无人机贮存架603上,而弹射起飞时,所述机械手组件504从相应的的无人机贮存架603上抓取无人机并调整姿态后放置于所述气动弹射系统2上,并且此时所述拦阻索组件4处于倒伏状态,所述拦阻缓冲网组件3的拦阻缓冲网处于收起状态,不影响无人机起飞。
33.如图8~9所示,本实施例中,所述机械手组件504包括y向旋转关节5044、x向旋转关节5045、升降臂5041、转盘5042和机械手5043,其中y向旋转关节5044安装于所述转运座上,x向旋转关节5045安装于所述y向旋转关节5044的旋转驱动端,且所述x向旋转关节5045的旋转驱动端设有升降安装座,所述升降安装座上设有升降臂5041和升降驱动组件,且所述升降臂5041通过所述升降驱动组件驱动升降,所述升降臂5041下端设有转盘安装座,所述转盘安装座上设有转盘5042和转盘电机5046,且所述转盘5042通过所述转盘电机5046驱动旋转,所述转盘5042下侧设有机械手5043用于抓取无人机,如图7所示,所述安装架体1后端设有安装梁103,且所述安装梁103上设有视觉捕捉相机503,所述转运机构上设有与所述视觉捕捉相机503配合的视觉定位模块505,本实用新型工作时,所述机械手组件504根据所述视觉捕捉相机503捕捉的无人机姿态进行相应调整,以使无人机姿态满足弹射起飞要求或存放要求,调整动作通过机械手组件504相关关节实现,具体为:升降臂5041先驱动机械手5043上升至设定高度以保证无人机有足够的姿态调节空间,高度调节到位后,y向旋转关节5044驱动x向旋转关节5045、升降臂5041、机械手5043等一同沿y向转动,转动到位后,x向旋转关节5045再驱动升降臂5041、机械手5043等一同沿x向转动,再次转动到位后,所述转盘5042旋转驱动调整机械手5043角度,上述过程中无人机随着机械手5043同步调整,并且无人机调整同时视觉捕捉相机503实时捕捉无人机姿态并实时反馈给控制系统,直至无人机姿态满足要求,本实施例中可以预先存储相应的符合要求的无人机姿态,调整时通过视觉捕捉相机503实时反馈无人机姿态并与预存的无人机姿态比对直至重合。所述机械手5043、视觉捕捉相机503和视觉定位模块505均为本领域公知技术且为市购产品,其中视觉捕捉相机503和姿态调整控制系统的调整相关算法根据编程获得,此同样为本领域公知技术。
34.如图8~9所示,本实施例中,所述y向旋转关节5044和x向旋转关节5045可采用市购的旋转舵机实现旋转驱动。
35.如图8~9所示,本实施例中,所述升降驱动组件包括升降驱动电机、升降驱动齿轮和升降驱动齿条,其中升降驱动齿轮通过升降驱动电机驱动转动,升降驱动齿条安装于所述升降臂5041上并与所述升降驱动齿轮啮合,所述升降驱动齿轮转动驱动升降驱动齿条升降移动,进而驱动所述升降臂5041升降移动。
36.如图8~9所示,本实施例中,所述转盘5042转动安装于所述转盘安装座下侧,所述转盘电机5046通过一个传动组件传递力矩驱动所述转盘5042转动,比如传动带组件,其中所述转盘电机5046输出轴上设有主动带轮,所述转盘5042中心轴上设有从动带轮,所述主动带轮和从动带轮通过同步带连接。
37.如图2~3所示,本实施例中,所述气动弹射系统2包括气动弹射器缸体201、气泵204和弹射控制组件,其中所述弹射控制组件包括电磁换向阀206、开关阀207和气压控制开关208,所述气泵204一端与进气管路相连,并且气压控制开关208安装于所述气泵204的自身气罐上实现气压监测控制,所述气泵204另一端通过气路与所述电磁换向阀206相连,且所述气路上设有开关阀207用于控制通断,所述电磁换向阀206输出侧的第一端口通过气管202与气动弹射器缸体201前端连接、第二端口通过气管202与气动弹射器缸体201后端连接,其控制原理为:气泵204上电后将空气压缩至自身气罐内,当需要弹射时,开关阀207打开且电磁换向阀206左部连通,高压气体推动气缸弹射器缸体201内的活塞移动,且所述活塞带动外侧的弹射座推动无人机移动实现弹射,5秒后电磁换向阀206换向,高压气体反向推动弹射座复位,当气压控制开关208监测到气泵204自身气罐内的气压变小时,气泵204补充高压空气,所述进气管路同时也可以用于排气。所述气动弹射器缸体201、气泵204和弹射控制组件中的各个阀均为本领域公知技术。另外如图2~3所示,本实施例中,所述气动弹射器缸体201前端设有前脚架203、后端设有后支腿205以实现支撑。
38.如图4~5所示,本实施例中,所述拦阻索组件4包括立架401、拦阻索402、拦阻索高度调节组件和张紧装置404,其中立架401下端铰接安装于贮存保障舱组6两侧并通过对应侧的倒伏驱动装置405支撑,所述立架401上设有拦阻索高度调节组件,所述立架401下端设有张紧装置404,其中所述拦阻索高度调节组件设有可沿着对应立架401升降的高度调节支座403,所述拦阻索402两端分别绕过对应侧的高度调节支座403后缠绕于对应侧的张紧装置404中。
39.如图4~5所示,本实施例中,所述拦阻索高度调节组件包括高度调节电机407和丝杠406,所述高度调节支座403包括丝母套4033,且所述丝母套4033套装于所述丝杠406上,所述高度调节电机407驱动所述丝杠406转动,进而驱动所述丝母套4033带动高度调节支座403升降移动,所述高度调节支座403上还设有转向轮4031和夹紧装置4032,其中拦阻索402绕过所述转向轮4031并穿过所述夹紧装置4032后再缠绕于对应的张紧装置404上,当拦阻索402张紧调节完毕后,所述夹紧装置4032夹紧拦阻索402使其保持张紧状态,本实施例中,所述夹紧装置4032可采用夹板结构,两个夹板通过气缸驱动闭合夹紧所述拦阻索402。
40.如图4~5所示,本实施例中,所述张紧装置404包括张紧电机4042和绕索盘4041,绕索盘4041安装于所述张紧电机4042的输出轴上,拦阻索402缠绕于所述绕索盘4041上,所述绕索盘4041通过所述张紧电机4042驱动旋转改变所述拦阻索402张紧程度。
41.如图4~5所示,本实施例中,所述倒伏驱动装置405采用气缸结构,其中所述贮存保障舱组6上侧设有后铰座4052,所述立架401上设有前铰座4051,所述气缸两端分别与对应的铰座铰接。
42.如图6所示,本实施例中,所述拦阻缓冲网组件3中的缓冲网驱动组件包括缓冲网支撑杆301、驱动线电机302、驱动线303和驱动滑套305,其中所述安装架体1两侧均设有缓冲网支撑杆301,且所述缓冲网支撑杆301上设有多个支撑滑套304,所述拦阻缓冲网两侧分别安装于对应侧的各个支撑滑套304上,所述安装架体1一端设有驱动线电机302,且所述驱动线电机302的输出轴上设有主动轮,所述安装架体1另一端设有从动轮306,且所述驱动线303一端绕过所述主动轮,另一端绕过所述从动轮306,所述缓冲网支撑杆301靠近所述从动轮306一端套装有驱动滑套305,且所述驱动滑套305与所述驱动线303固连,同时所述驱动
滑套305与各个支撑滑套304依次通过连接线实现串联,所述驱动线电机302通过主动轮驱动所述驱动线303移动,进而驱动所述驱动滑套305沿着所述缓冲网支撑杆301滑动,其中所述驱动滑套305后移时推动各个支撑滑套304后移,从而实现拦阻缓冲网闭合,所述驱动滑套305前移时通过所述连接线带动各个支撑滑套304依次前移,从而实现拦阻缓冲网张开。
43.如图6所示,所述安装架体1前后两侧均设有侧梁102,所述缓冲网支撑杆301两端以及所述驱动线电机302和从动轮306分别安装于对应的侧梁102上。
44.如图7所示,所述转运机构5包括y向驱动组件501和x向驱动组件502,其中所述安装架体1两侧上端均设有上梁101,所述y向驱动组件501安装于对应侧的上梁101上,所述y向驱动组件501包括y向移动座,且所述x向驱动组件502两端分别安装于对应侧的y向移动座上,所述x向驱动组件502包括x向移动座,且所述转运座设于所述x向移动座上。本实施例中,所述y向驱动组件501和x向驱动组件502均采用齿轮齿条结构实现驱动,其中y向驱动组件501包括y向电机、y向齿轮和y向齿条,y向移动座与对应的上梁101滑动连接,y向齿条设于所述上梁101上,y向电机设于所述y向移动座上,y向齿轮设于所述y向电机的输出轴上并与所述y向齿条啮合,所述y向电机驱动y向齿轮旋转并沿着y向齿条滚动,进而驱动所述y向移动座移动,所述x向驱动组件502结构与y向驱动组件501相同。如图7所示,在所述x向驱动组件502上设有视觉定位模块505和照明装置506。
45.如图10~11所示,本实施例中,所述无人机贮存架603下端设有可移动的配重底盘607,所述无人机贮存架603上端设有可升降的无人机存放台604,所述配重底盘607设有滚轮608和底盘移动电机,且所述底盘移动电机驱动对应的滚轮608转动,进而实现所述配重底盘607带动整个无人机贮存架603移动出入所述保障舱601,本实施例中,所述配重底盘607重量为50公斤以避免无人机贮存架603倾倒,所述无人机存放台604升降用于配合承载下放的无人机落入保障舱601内或驱动无人机上升至设定高度使机械手组件504完成抓取。
46.如图10~11所示,本实施例中,所述无人机贮存架603内部设有存放台升降驱动装置605,且所述存放台升降驱动装置605下端与所述配重底盘607固连、上端与所述无人机存放台604固连,所述存放台升降驱动装置605用于驱动所述无人机存放台604升降运动。所述存放台升降驱动装置605可根据需要采用合适的驱动装置,比如气缸、电动推杆等市购产品,所述无人机贮存架603内部设有固定座606用于辅助固定存放台升降驱动装置605使其保持垂直状态。
47.如图10所示,所述保障舱601上设有可开启的舱门供无人机出入,此为本领域公知技术,另外相邻保障舱601之间设有中央平台602,所述气动弹射系统2设于所述中央平台602上。
48.本实用新型的工作原理为:
49.本实用新型工作时包括抓取无人机进行弹射和无人机回收两部分作业,其中抓取无人机时,所述保障舱601上的舱门打开,无人机贮存架603上端的无人机存放台604上升到设定高度,然后机械手组件504通过转运机构5驱动移动到无人机存放台604上方,机械手组件504中的升降臂5041下降到设定高度,然后机械手5043抓取无人机,升降臂5041再上升到设定高度,转运机构5再驱动机械手组件504和无人机移动至指定位置,然后机械手组件504配合视觉捕捉相机503及控制系统程序调整无人机姿态以使其满足弹射要求能够放置于气动弹射系统2上,当无人机姿态调整完毕后,转动机构5再驱动机械手组件504移动至气动弹
射系统2上方,机械手组件504中的升降臂5041下降将无人机准确放置于气动弹射系统2上,最后气动弹射系统2启动实现无人机弹射释放,此时所述拦阻索组件4需处于倒伏状态,同时拦阻缓冲网组件3处于收起状态,不会影响无人机抓取起飞。
50.当无人机进行回收时,所述拦阻索组件4两侧的立架401通过倒伏驱动装置405驱动立起,然后控制系统根据反馈的无人机飞行姿态等参数调整拦阻索402高度和张力,同时所述拦阻缓冲网组件3中的拦阻缓冲网打开,无人机下侧设有挂钩用于钩挂于拦阻索402上,此为本领域公知技术,拦阻索402高度和张力通过调整后,无人机下侧挂钩可以准确钩挂于拦阻索402上,并最终停留在所述拦阻缓冲网中,此时视觉捕捉相机503捕捉到无人机位置并反馈给控制系统,控制系统通过转运机构5驱动机械手组件504移动至无人机上方,然后机械手组件504中的升降臂5041下降完成无人机抓取并上升到设定高度,然后机械手组件504配合视觉捕捉相机503及控制系统调整无人机姿态以使其满足存放要求,无人机姿态调整完毕后,机械手组件504通过转运机构5驱动移动至相应的无人机贮存架603上方,此时保障舱601舱口打开,机械手组件504中的升降臂5041下降将无人机放置于相应的无人机存放台604上,最后无人机存放台604下降带动无人机落入保障舱601中完成无人机回收。
51.本实用新型可以整体移动,从而解决了固定翼无人机集群在复杂环境作业时遇到的诸如长距离运输、平台部署、设备维护等环境适应性问题,并且本实用新型可根据需要实现无人机弹射释放和无人机回收两种作业状态的灵活转换,相比于现有技术中无人机平台的单一作业,本实用新型使用的灵活性和适用性均大大提高。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1