飞行器推进单元的制作方法
飞行器推进单元
1.相关申请数据
2.本技术要求于2021年2月9日提交的美国申请第63/147,560号的权益,该美国申请的内容如同明确阐述那样通过引用并入本文。
技术领域
3.本发明总体涉及航空领域,并且更具体地,涉及飞行器推进系统的封装或冷却。
4.附图的若干视图的简单描述
5.为了便于标识对任何特定元素或动作的讨论,附图标记中的一个或多个最高有效数字指代该元素被首次引入时所在的图号。
附图说明
6.图1是根据一些示例的飞行器的平面图。
7.图2是根据一些示例的在图1的飞行器中使用的飞行器能量系统的示意图。
8.图3示出了根据一些示例的在图1的飞行器100中使用的飞行器推进系统300的一部分。
9.图4另外示出了根据一些示例的图3的飞行器推进系统的一部分。
10.图5示出了根据一些示例的穿过图3和图4的飞行器推进系统的局部截面。
11.图6示出了根据一些示例的在飞行器推进系统中使用的逆变器板。
12.图7示出了根据一些示例的在图6的逆变器板的热盘管(thermal coil)与冷却板之间的热界面(thermal interface)。
13.图8示出了根据一些示例的图3和图4的飞行器推进系统的立体图。
14.图9a、图9b和图9c示出了根据一些示例的飞行器推进系统和相关部件例如螺旋桨和短舱的倾斜。
15.图10a、图10b和图10c示出了根据一些示例的飞行器推进系统和相关部件例如螺旋桨和短舱的倾斜。
具体实施方式
16.本发明的一些示例的以下描述并非旨在将本发明限于这些示例,而是使本领域的任何技术人员能够制造和使用本发明。
17.图1是飞行器100的平面图。飞行器100包括机身114、两个机翼112、尾翼110和推进系统108,推进系统108被实现为位于短舱118中的可倾转旋翼组件116。飞行器100包括图1中被实现为短舱电池组104和机翼电池组106的一个或更多个动力源。在所示示例中,短舱电池组104位于内侧短舱102中,但是应当理解,短舱电池组104可以位于形成飞行器100的一部分的其他短舱118中。电池组形成参照图2描述的能量系统200的一部分。飞行器100通常将包括相关联的装备,例如电子基础设施、控制表面、冷却系统、起落架等。
18.机翼112用于在向前飞行期间产生升力以支撑飞行器100。另外地或可替选地,机
翼112可以用于在各种结构应力(例如,空气动力、重力、推进力、外部点载荷、分布式载荷和/或体积力(body force)等)的影响下在结构上支撑电池组202、电池模块204和/或推进系统108。机翼112可以在飞行器上具有任何合适的几何形状和/或布置。
19.图2是根据一些示例的在图1的飞行器100中使用的飞行器能量系统200的示意图。如所示出的,能量系统200包括一个或更多个电池组202。每个电池组202可以包括一个或更多个电池模块204,电池模块204进而可以包括多个电池单元206。
20.通常与电池组202相关联的是一个或更多个电推进系统108、用于将电池组202连接至能量系统200中的其他部件的电池分配器(battery mate)208、作为通风系统的一部分的爆裂膜(burst membrane)210、用于冷却的流体循环系统212、以及用于调节电力输送(在操作期间从电池输送电力,并且在充电期间向电池输送电力)并将电池组202与能量系统200的电子基础设施集成的电力电子装置214。如图1中所示,推进系统108可以包括多个旋翼组件。
21.另外地或可替选地,电子基础设施和电力电子装置214可以用于将电池组202集成到飞行器的能量系统中。电子基础设施可以包括电池管理系统(bms)、电力电子装置(hv架构、电力部件等)、lv架构(例如,车辆线束、数据连接等)和/或任何其他合适的部件。电子基础设施可以包括模块间电连接,其可以在电池组和/或模块之间传送电力和/或数据。模块间电连接可以包括隔板连接、母线、线束连接(wire harnessing)和/或任何其他合适的部件。
22.电池组202用于以可再充电的方式存储电化学能量以用于供应给推进系统108。电池组202可以以任何合适的方式围绕飞行器布置和/或分布。电池组可以被布置在机翼内(例如,机翼腔内部)、短舱内部和/或飞行器上的任何其他合适位置中。在具体示例中,该系统包括在左翼的内侧部分内的第一电池组和在右翼的内侧部分内的第二电池组。在第二具体示例中,该系统包括在左翼的内侧短舱内的第一电池组和在右翼的内侧短舱内的第二电池组。电池组202可以包括多个电池模块204。
23.能量系统200包括冷却系统(例如,流体循环系统212),该冷却系统用于使工作流体在电池组202内循环以去除电池组202在操作或充电期间产生的热量。可以以任何合适的方式通过冷却系统将电池单元206、电池模块204和/或电池组202串行和/或并行地流体连接。
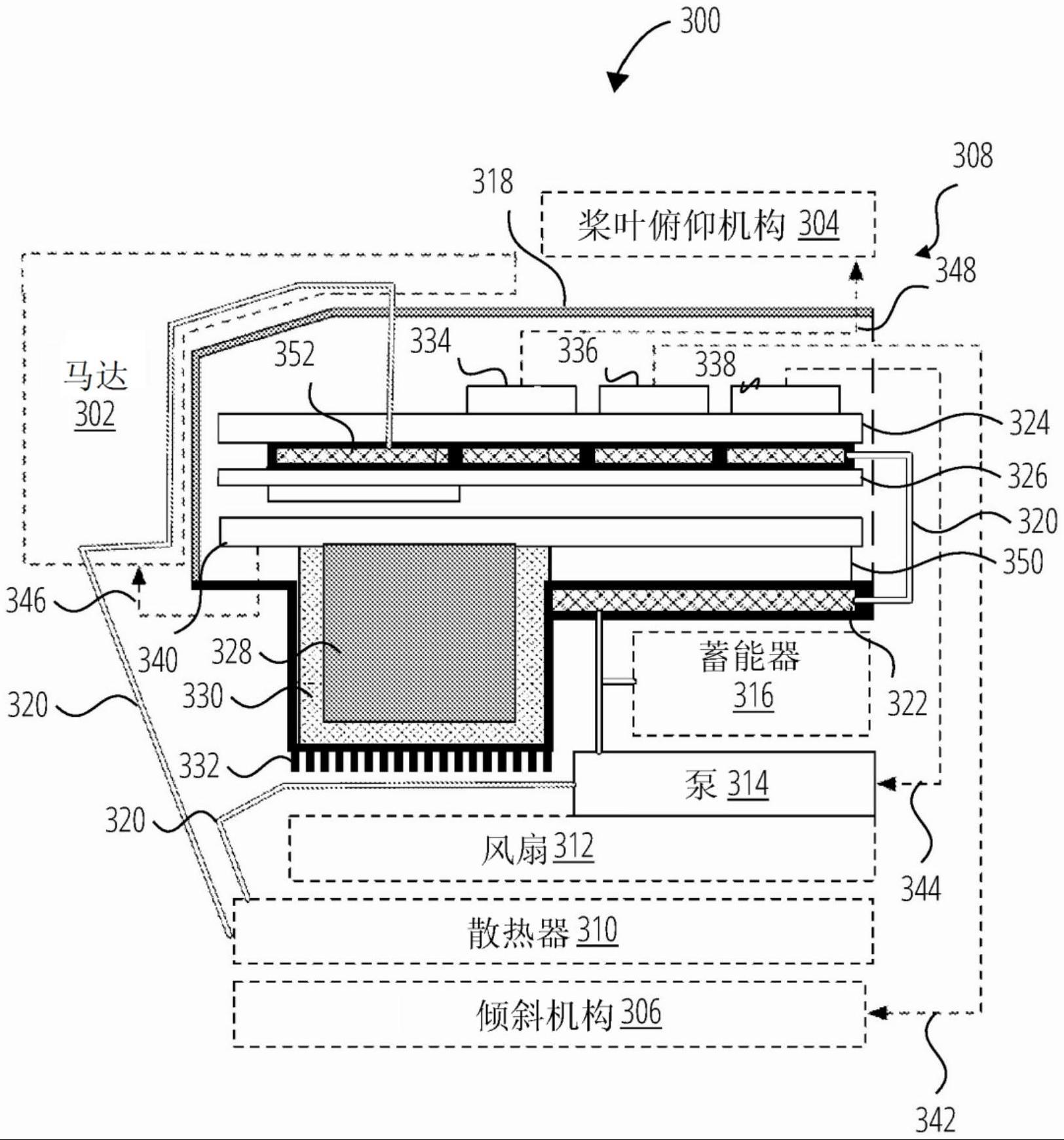
24.图3示出了根据一些示例的在图1的飞行器100中使用的飞行器推进系统300的一部分。飞行器推进系统300包括马达302以及与马达302结合使用以操作飞行器推进系统300的一个或更多个附属单元,例如,附属单元可以包括桨叶俯仰机构304、倾斜机构306和逆变器系统308。更具体地,图3中示出了穿过逆变器系统308的一半截面,另外参见图4,图4是穿过逆变器系统308的两半截面。
25.与飞行器推进系统300的操作结合使用的附属单元或系统还可以包括共同构成飞行器推进系统300的冷却系统的散热器310、风扇312、泵314和蓄能器316。这些冷却系统部件经由冷却剂路径320彼此连接并且连接至多个冷却板322。
26.逆变器系统308包括安装在逆变器壳体318内的逆变器板324、控制板326和马达逆变器板340。马达逆变器板340包括用于向马达302供应电力的逆变器350。逆变器板324包括多个逆变器,例如,通过电连接348耦接至桨叶俯仰机构304的逆变器334,通过电连接342耦
接至倾斜机构306的逆变器336,以及通过电连接344耦接至集成的泵314和风扇312的逆变器338。马达302通过电连接346耦接至逆变器350。
27.逆变器系统308用于调节向马达302、桨叶俯仰机构304、倾斜机构306、风扇312、泵314供应的功率以控制其操作。更具体地,在一些示例中,逆变器系统308用于控制向每个附属单元中的交流(ac)马达供应的动力的频率和/或电压以控制特定附属单元的旋转速度、位移和/或扭矩。
28.在一些示例中,马达302连接至飞行器100的旋翼120或者集成到旋翼120的桨毂中。马达302可以是内转子式马达、外转子式马达和/或任何其他合适类型的马达。优选地,马达302是大直径马达和/或被设计并构造成(例如,利用传动装置)向螺旋桨提供高扭矩和低速度的马达。马达302可以具有任何合适的功率容量和/或要求。优选地,马达302是三相马达,并且更优选地,马达302被缠绕为两个独立的三相马达以提供冗余和性能。马达302可以具有下述功率阈值(例如,峰值功率、最大连续功率、额定功率、双绕组马达的各组绕组的最大功率等):小于80kw、500kw、大于500kw、由前述值限定的任何范围和/或任何其他合适的功率特性。在具体示例中,马达302可以使旋翼120以如下最高速度转动:小于100rpm、100rpm、小于5000rpm、5000rpm、大于5000rpm、由前述值限定的任何范围和/或任何适当的速度,并且可以以如下最大扭矩进行操作:小于10n-m、50n-m、5000n-m、大于5000n-m,由前述值限定的任何范围和/或任何适当的最大扭矩。
29.逆变器336被配置成向倾斜机构306供应经调节的功率,在一些示例中,倾斜机构306用于在向前构型与悬停或垂直飞行构型之间枢转和/或平移马达302。如图9a至图9c和图10a至图10c中更详细地示出的,倾斜机构306可以连接至马达302的后部/内侧部分(和/或安装至其的逆变器)或者马达302的前部/内侧部分,并且将马达302耦接至飞行器的机体。
30.逆变器壳体318用于包封和/或在结构上支撑控制板326、逆变器板324和逆变器板340。另外地或可替选地,逆变器壳体318可以用于形成冷却系统的一部分、可以安装冷却子系统的泵314和/或风扇312、用作emi屏蔽以及/或者执行其他功能。逆变器壳体318优选地被构造成被嵌套在马达302的一部分(例如,在向前构型下为后部部分)内和/或被安装至马达302的该部分,但是可以以其他方式进行构造。
31.逆变器壳体318可以包括用作冷却子系统的一部分并且/或者用于将热能从逆变器壳体318传递至工作流体(例如,空气或液体冷却剂)的集成元件。逆变器壳体318可以包括封闭逆变器壳体318的基部和/或宽面的集成式冷却板322。逆变器壳体318还可以包括从逆变器壳体318的外围延伸的热散片332。在如图3和图4所示出的一些示例中,逆变器壳体318的基板包括具有一组内部冷却通道的冷却板322和位于逆变器壳体318外部(例如,在飞行器推进系统300处于向前构型下时面向后方)的后部处的多个散热片332。
32.控制板326用于(例如,从飞行处理器或fms)接收命令,以及基于接收到的命令来控制逆变器板的操作。控制板326还可以用于监测各种传感器以及/或者基于传感器反馈来控制各种附属单元或致动器,并且与机载飞行管理系统(fms)接口。控制板326可以被配置成提供场定向控制(foc)或矢量控制,但是另外地或可替选地,控制板326可以被配置成提供直接扭矩控制(dtc)、标量控制(例如,通过脉冲宽度调制;针对低功率致动器,例如风扇;等等)和/或被配置成向任何合适的致动器提供任何合适的控制。优选地,在逆变器壳体318
的每个不同的冷却剂容积(volume)和/或子区域内布置有一个控制板326,该控制板326电连接至逆变器壳体318的相应冷却剂容积(子区域)内的各逆变器并且/或者控制该逆变器。然而,另外地或可替选地,可以存在连接至逆变器壳体内的所有逆变器并且/或者控制这些逆变器的单个控制板326,或者在每个冷却剂容积内存在多于一个的控制板。控制板326优选地是印刷电路板(pcb),但是可以以其他方式适当地实现。控制板可以包括:处理器卡和栅极驱动电路系统;然而,另外地或可替选地,控制板可以包括任何其他合适的部件。
33.逆变器板324和逆变器板340用于调节向致动器例如马达302、桨叶俯仰机构304、倾斜机构306、风扇312、泵314供应的电力以根据来自控制板326的信号控制其致动。更具体地,逆变器板将(例如,来自机载电力源,例如电池组202的)dc电力转换成(例如,要向ac致动器供应以控制旋转速度和/或扭矩的)特定频率和/或电压的相控输出。逆变器板各自包括与致动器组中的相应致动器的一组绕组相关联的一个或更多个逆变器电路(下文中被称为“逆变器”)。逆变器包括变压器、电阻器、晶体管(例如,mosfet)、电容器(例如,去耦dc链路电容器)以及/或者互连以形成根据相应致动器的电力要求指定的电路的任何其他合适的电气部件的任何合适的布置、组合和/或排列。
34.逆变器板组优选地包括初级(例如,高功率)逆变器板340和次级(例如,低功率)逆变器板324,初级逆变器板340包括用于致动器组中最高功率致动器(例如,马达302)的逆变器电路系统,次级逆变器板324包括用于致动器组中的其余致动器的逆变器。高功率逆变器板340(和相关联的最高功率致动器)的功率要求可以超过致动器组中其余致动器的总功率要求,使得初级逆变器板340的最大功率输出比次级逆变器板324的最大功率输出大(例如,小于0.5倍、小于3倍、小于5倍、大于5倍、其间的任何倍数关系,和/或任何其他合适的值)。然而,另外地或可替选地,逆变器板可以包括容纳所有逆变器的单个板、多个次级(低功率)板和/或逆变器可以以其他方式分布在任何一组合适的逆变器板之间。
35.逆变器板324、逆变器板340和控制板326优选地以“堆叠”构造布置,但是可以以其他方式适当地布置成平行于逆变器壳体的宽面/基板、正交于马达的旋转轴线408、垂直于防火墙410和/或其他方式适当地布置。控制板326优选地被布置在初级逆变器板340与次级逆变器板324之间,但是另外地或可替选地,控制板326可以跨次级逆变器板324的厚度与初级逆变器板340相对布置,和/或以其他方式适当地布置。该组逆变器板和/或控制板可以以任何合适的方式分布。可以使用柔性印刷电路在控制板与逆变器板之间路由低压电力和/或数据(例如,传感器和控制信号)。相比之下,优选地通过母线连接和/或刚性电连接(例如,正交于堆叠的板的宽面)形成逆变器与致动器之间的电力连接。然而,可以以其他方式在逆变器和/或控制板之间适当地路由电力和/或数据连接。
36.耦接至逆变器板340的是dc链路电容器328。dc链路电容器328形成负载均衡储能装置,其有助于保护逆变器网络免受瞬时电压尖峰、浪涌和emi的危害。dc链路电容器328可以是陶瓷的、薄膜的和/或其混合物。dc链路电容器328可以沿着逆变器板340的后侧布置和/或邻近逆变器壳体318的基板布置。在第二示例中,dc链路电容器328可以被布置在防火墙的远端和/或沿着逆变器的外围布置。dc链路电容器328可以被包封在用于将热量从dc链路电容器328传递至散热片332和冷却板322的导热环氧树脂330中。
37.冷却板322和冷却板352用于从控制板326和/或逆变器板324与逆变器板340的发热部件以及dc链路电容器328去除热能。飞行器推进系统300可以包括单独的冷却板,所述
冷却板被布置在壳体的每个不同的冷却剂容积内(例如,如图4中所示,在防火墙410的每一侧上一个冷却板),并且与单个多逆变器和/或热耦接至多个多逆变器的冷却板配对(热耦接)。多逆变器是针对多个致动器调节功率的单个逆变器。在每个多逆变器内可以存在单个冷却板,在每个多逆变器内可以存在多个冷却板、热耦接至多个多逆变器的单个冷却板和/或在系统内可以存在任何合适数目的冷却板。
38.在一些示例中,冷却板组包括热耦接至初级逆变器板340的发热区域的初级冷却板322,以及热耦接至控制板326和/或次级逆变器板324的一个或更多个次级冷却板352。在第一示例中,初级冷却板322被布置在初级逆变器板340与逆变器壳体318之间(/或被集成到逆变器壳体318中)。在第二示例中,一个或更多个次级冷却板352被布置在次级逆变器板324与控制板326(例如,处理器卡)之间并且热耦接至次级逆变器板324和控制板326。在第二示例中,(次级逆变器板324和控制板326中的)每个发热区域在一个或更多个次级冷却板352的宽面上的投影面积可以是非交叠或交叠的。然而,可以以其他方式相对于控制板326和/或处理板(以及其上的发热区域)来布置一个或更多个次级冷却板352。在一些示例中,冷却板可以被集成到逆变器壳体318的主体中并且/或者形成逆变器壳体318的(例如,在后端)封闭不同冷却剂容积的基板。在这样的示例中,单个冷却板可以包括内部容积,该内部容积延伸穿过多个多逆变器的逆变器板(和/或控制板)的发热区域和/或宽面并且被热连接至两个多逆变器。在这样的示例中,冷却板可以经由并行冷却剂流动路径来冷却冗余的多逆变器,但是另外地或可替选地,可以以串行和并行冷却剂流的任何合适的组合/排列来冷却多逆变器。可替选地,可以利用(例如,被机械地隔离,从而形成并行冷却剂流动路径的)多个流体通道将单个冷却板热连接至多个多逆变器。
39.形成冷却剂路径320的冷却剂路由部件用于引导冷却剂(例如,水/乙二醇混合物、变压器油等)循环通过冷却板322和冷却板352或者邻近或围绕冷却板322或冷却板352循环,并且将冷却板连接至冷却系统的其余部分(即,形成冷却环路)。冷却剂路由部件可以包括任何流体歧管、软管、管、管道、逆变器壳体内的通道、马达主体内的通道和/或任何其他合适的冷却剂路由部件。优选地,冷却剂路径320将初级冷却板322串行地流体连接至次级冷却板322(例如,在多逆变器内/在子区域内)。冷却剂路径320可以形成单个流体环路(例如,所有部件串联,并行流体流的多个区段全部汇聚以穿过环路的某个区段,等等)或多个并行流体环路。然而,冷却剂路径320可以以串行/并行冷却剂流的任何合适的组合和/或排列将冷却系统的各种冷却部件互连。冷却剂路由部件可以穿过逆变器板厚度中的孔口(例如,经由流体歧管或其他流体路由件(fluid routing))并且/或者被围绕这些板路由。冷却剂路由部件可以包括在逆变器壳体318的后端(例如,在安装侧附近,在泵/散热器附近;冷却剂入口)处的第一冷却剂路由终端以及在逆变器壳体318的前端处的第二冷却剂路由终端(例如,出口)。第二冷却剂路由终端优选地连接至马达302,并且第一冷却剂路由终端优选地连接至泵314,然而,冷却剂路径320可以以其他方式将冷却系统的各种部件互连。
40.可选地,冷却剂路径320部件可以引导冷却剂流通过用于将热量从冷却剂排出到周围环境的散热器310。在一些示例中,散热器310可以邻接和/或嵌套在倾斜机构306附近,使得在倾斜机构的一个或更多个构型中,通过散热器310的外部气流(例如,通过风扇312进行的管道流动)被部分地和/或完全地阻挡(例如,在流动方向上,沿着马达的旋转轴线408的长度方向等)。特别地,紧密地嵌套散热器310和倾斜机构306并且/或者直接阻碍通过散
热器310的气流可以增加向前飞行期间的封装密度和空气动力学效率,在向前飞行期间,马达302和逆变器板340的功率要求降低(并且,由此可推论,来自飞行器推进系统300的必要排热降低)。同样地,在倾斜机构306在转变期间和/或处于悬停构型时进行转换期间使散热器310与马达302和逆变器壳体318一起移位可以在由于功率和/或排热要求最大而导致热载荷最大时使由散热器310实现的气流和/或排热增加。进一步参见图9a至图9c和图10a至图10c。在这样的情况下,可以通过散热器310与马达302一起移动以增加通过散热器310的气流来使悬停或垂直飞行期间的排热有效地加倍。然而,该系统可以包括任何其他合适的散热器310和/或以其他方式合适地路由冷却剂通过散热器310。可替选地,该系统可以通过制冷系统和/或其他亚环境(sub-ambient)冷却架构来排热。
41.在一些示例中,冷却剂路由部件可以在不与环境进行压力交换的情况下完全流体地包封并容纳冷却剂。在这样的示例中,冷却剂路由部件可以引导冷却剂通过蓄能器316,蓄能器316可以调节流体压力并防止过压。可替选地,冷却剂路径320可以包括向周围环境排放的被动式冷却剂(passive coolant)和/或任何其他合适的压力平衡机构以防止冷却子系统内的气体积聚。
42.泵314用于使冷却剂沿着冷却剂路径320循环并通过冷却剂路由部件、冷却板和/或致动器。另外地或可替选地,泵314可以用于将冷却剂从马达302和/或冷却板322输送至散热器310。
43.风扇312用于使环境空气循环穿过逆变器壳体318的散热片332和/或通过散热器310。在一些示例中,风扇312可以机械地连接至泵314的旋转轴和/或以其他方式与泵314机械地集成或被集成到泵314中。风扇312可以被直接连接至泵314,并且被配置成以与泵轴的角速率成比例的角速率(例如,在无齿轮啮合的情况下的等效角速率)旋转。风扇312可以是管道式的和/或非管道式的以及/或者以其他方式适当地实现。另外地或可替选地,风扇312可以与泵314分离(例如,被集成到散热器组件中等),和/或被单独供电。
44.飞行器推进系统300可以可选地包括用于监测系统操作的传感器。传感器可以包括:温度传感器(例如,热敏电阻、热电偶等)、惯性传感器(例如,加速度计、陀螺仪、imu等)、阻抗传感器、霍尔效应传感器、流量传感器(例如,流速传感器、流体压力传感器等)和/或任何其他合适的传感器。在一些示例中,温度传感器可以用于监测马达绕组、轴承、冷却剂和/或任何其他合适部件的温度。在一些示例中,流量传感器可以监测冷却剂子系统中的冷却剂压力和/或流速。然而,该系统可以包括任何其他合适的传感器。传感器优选地以通信方式连接至控制板326并且可以与各种致动控制方案(例如,前馈、反馈等)结合使用。然而,在一些示例中,在外侧逆变器板(例如,处于向前构型下的堆叠体的前导逆变器板324;次级/三级逆变器板)处接收传感器输入可能是有利的。在这样的一些示例中,可以在逆变器板324的与逆变器电隔离的部分处接收传感器输入并将其中继至控制板326(或fms)。因此,控制板326可以被视为“间接”连接至飞行器推进系统300的各种传感器并且/或者通过逆变器板324间接连接。
45.冷却剂路由优选地在冷却剂流动路径的各个部分上具有基本均匀(例如,变化小于10%、20%、50%、完全均匀等)和/或恒定的截面面积。冷却剂优选地以高流速循环通过冷却剂路由部件(例如,使得在一些情况下可以忽略通过马达的冷却剂温升;在这些情况下通过马达302和/或逆变器壳体318的冷却剂温升小于5摄氏度;等等)。
46.在一些示例中,冷却剂路径320中来自散热器310的冷却剂在定子404处进入马达302并且穿过定子404中的励磁线圈或在励磁线圈之间穿过,并且然后穿过电汇流排(electrical bussing)406。冷却剂路径320中的冷却剂然后在返回至泵314之前进入逆变器壳体318并且穿过冷却板352和冷却板322,并从泵314返回至散热器310。冷却剂路径因此提供集成式冷却系统,其不仅冷却马达302,而且还冷却用于与飞行器100相关联的多个致动器的逆变器。冷却路径中的流动方向和部件顺序当然可以改变或颠倒。
47.通过将逆变器封装在致动机构(例如,倾斜机构906)的外侧,可以降低线缆布线至在致动机构外侧的致动器(例如,泵/风扇、电马达、桨叶俯仰机构等)的复杂性。
48.图4另外示出了根据一些示例的图3的飞行器推进系统300的一部分。更具体地,图4中示出的是穿过图3中所示出的逆变器系统308的两半截面。在一些示例中,逆变器壳体318被构造成在马达302的径向内部内延伸,其中马达302的定子404和/或转子402被径向地(相对于马达的旋转轴线408)布置在逆变器壳体318的一部分的外侧。在这样的示例中,逆变器壳体318可以从多个永磁体或马达302的定子404径向向内延伸。逆变器壳体318的外周可以被布置成与马达302的径向内周齐平和/或从马达302的径向外周嵌入,但是可以以其他方式适当地构造。更优选地,逆变器壳体318可以从马达302的电汇流排406(例如,集电环)径向嵌入并且/或者由定子404的壳体限制。然而,可以以其他方式相对于马达适当地布置逆变器壳体318。逆变器壳体318可以包括电气总线端子、冷却剂通道/孔口、散热片和/或呈任何适当布置的任何其他适当特征。逆变器壳体318优选地由具有高导热性的金属(例如,铝)制成,但是也可以另外地或可替选地包括隔热材料、电绝缘材料、塑料材料、复合材料、黑色金属(例如,铁)、钢、铜和/或任何其他合适的材料。
49.逆变器壳体318可以包括防火墙410,防火墙410用于将逆变器壳体的内部细分为多个(例如,两个)不同的冷却剂容积(例如,流体隔离的第一容积412和第二容积414)以及/或者防止热事件在逆变器壳体318内部的相对部分之间(例如,在壳体内的冗余或次级隔离容积之间)传播。防火墙410优选地在宽阔的上表面与下表面之间(例如,垂直于图4中所示出的逆变器壳体318的上表面和下表面)延伸穿过逆变器壳体318的内部,然而,可以以其他方式适当地布置防火墙410。可以相对于马达的旋转轴线408沿着矢状面布置防火墙410并且/或者使之相对于旋转轴线408轴向和径向延伸,但是另外地或可替选地,可以以其他方式适当地布置防火墙410。由防火墙410在逆变器壳体318内限定的冷却剂容积优选地是对称的和/或具有基本相等的容积,但是防火墙410可以以其他方式适当地划分逆变器壳体。防火墙410可以由与壳体外部相同的材料(例如,铝、钢等)和/或任何其他合适的材料制成。
50.逆变器系统308可以包括控制板326和/或逆变器板324与逆变器板340的冗余实例,每个冗余实例与不同的冷却剂容积相关联。然而,还可以在逆变器壳体318的不同冷却剂容积之间共享电子器件。在共用的不同冷却剂容积内的电子器件优选地被连接在一起并且协作地形成单个逆变器(例如,针对多个致动器调节功率的多逆变器),但是也可以可替选地被断开连接或以其他方式进行构造。因此,在逆变器板组可以被视为可以单独地致动致动器组中的每个致动器的“多逆变器”(例如,四逆变器(quad inverter))的情况下,壳体可以包括多个所述多逆变器,其可以在防火墙410的相对侧被热隔离、机械隔离和/或电隔离。在具体示例中,防火墙可以将逆变器壳体细分为两个不同的部分,例如第一容积412和第二容积414,每个容积包括控制板326和协作地形成四逆变器的两个逆变器板,即逆变器
板324和逆变器板340。在一些示例中,两个四逆变器可以协作地和/或独立地致动一组四个致动器。因此,逆变器壳体318可以包括两个(冗余)四逆变器以用于总计八个逆变器,这些逆变器通常被封装在逆变器壳体318内(和/或通过逆变器壳体318冷却)。
51.因此,当与在单个电力推进系统内机械耦接在一起的两个独立的三相马达耦接的情况下,该技术的示例可以在单个逆变器系统内和/或在单个逆变器壳体318内提供双重冗余。这样的示例可以利用双缠绕式致动器、重复的逆变器和/或控制板、单独的冷却部件,以及/或者提供任何其他合适的冗余。这样的示例同样可以(例如,使用防火墙410)将逆变器壳体318细分为不同的冷却剂容积,以减轻任何热事件在冗余逆变器之间的传播。
52.图5示出了根据一些示例的穿过图3和图4的飞行器推进系统300的局部截面。特别地,并且如上面参照图4所讨论的,逆变器壳体318被嵌套在马达302的径向内部,其中马达302的定子404和/或转子402被径向地(相对于马达的旋转轴线408)布置在逆变器壳体318的一部分的外侧。图5中还示出了用于dc链路电容器328的散热片332、集成的泵/风扇502、散热器310以及形成冷却剂路径320的导管中的一些导管。
53.这种构造通过将动力和/或冷却高效地路由通过逆变器/控制板来提供高功率密度逆变器封装。在一些示例中,该系统通过将一个或更多个逆变器板封装在定子和/或转子的内部来提高无刷dc马达(例如,封装在马达内的逆变器)的封装效率。同样地,这种构造可以通过将冷却子系统紧密地集成在马达302和/或逆变器壳体318内或者部分地集成在马达302和/或逆变器壳体318内来提高功率密度。
54.图6示出了根据一些示例的在飞行器推进系统300中使用的逆变器板604。逆变器板604包括多个发热部件602。在一些示例中,这些发热部件是包括逆变器板324上的逆变器334、逆变器336和逆变器338的sic开关。逆变器板604的发热部件602可以跨逆变器板604的厚度与冷却板相对布置。在这样的情况下,逆变器板604可以包括热传递路径,该热传递路径包括位于发热部件602的基部(和/或分布在发热区域周围)的高传导性材料的热盘管606,其延伸穿过逆变器板604并且将一个或更多个发热部件602热与一个或更多个冷却板例如冷却板322连接。
55.热盘管606用于降低通过板的厚度的热阻。热盘管606优选地由高热导率材料例如铜、铝和/或其他高热导率材料制成,并且优选地与逆变器板604的电路系统电隔离以避免使逆变器板短路。在一个示例中,热盘管606可以包括集成的电绝缘层,例如,陶瓷层或其他电绝缘层(例如,具有低于材料其余部分的热导率,具有低于板的热导率等),其示例在图7中示出。在第二示例中,可以在外围(例如,在电气部件与热盘管的暴露部分之间、在冷却板与热盘管之间等)利用电绝缘涂层或密封件将热盘管606电隔离。
56.在一些示例中,逆变器板604可以包括被构造成将逆变器板的部件/区域与(例如,热耦接至同一逆变器板的不同发热区域的)冷却板热绝缘的绝缘层。在一个示例中,薄膜电容器与冷却板热绝缘,并且被冷却至环境空气,而陶瓷电容器则使用液体冷却剂来进行冷却。这可以使得能够使用液体冷却剂来单独冷却具有大的冷却要求的发热部件,例如mosfet(其能够经受远高于环境温度的高温)。dc链路薄膜电容器与壳体的冷却板/基板之间的热绝缘可以具有小于(同等厚度的)气隙的热导率的热导率、大于气隙的热导率的热导率,并且/或者可以具有任何其他合适的热特性。
57.图7示出了根据一些示例的在图6的逆变器板的热盘管606与冷却板322之间的热
界面。邻近冷却板322设置有流体通道702,经由冷却剂路径320向其供应冷却剂。热盘管606与冷却冷却板322之间设置有导热层706。设置电隔离层704以将热盘管606与冷却板322以及彼此之间电隔离。在其他示例中,热盘管606可以被安装至电隔离704,电隔离704进而可以被安装至冷却板322。
58.图8示出了根据一些示例的图3和图4的飞行器推进系统300的立体图。图8示出了马达302、风扇312和散热器310以及形成冷却剂路径320的一部分的管道中的一些管道的相对定位。
59.图9a、图9b和图9c示出了根据一些示例的飞行器推进系统300和相关部件例如螺旋桨902和短舱904的倾斜。飞行器优选地是如所示出的evtol飞机(例如,多模态飞行器),但是另外地或可替选地,飞行器可以包括任何合适的飞行器。飞行器100优选地是具有能够在向前布置(图9a和图10a)与悬停或垂直飞行布置(图9c和图10c)之间操作的多个飞行器推进系统的倾转旋翼飞行器。然而,可替选地,飞行器可以是具有一个或更多个旋翼组件或推进系统的固定翼飞行器、具有一个或更多个旋翼组件的直升机(例如,其中至少一个旋翼组件或者飞行器推进系统被基本轴向地定向以提供水平推力)、倾转翼飞行器、无翼飞行器(例如,直升机、多旋翼飞行器、四旋翼飞行器)和/或由螺旋桨或旋翼推进的任何其他合适的旋翼飞行器或交通工具。
60.如图9a至图9c中所示出的,在一个示例中,包括飞行器推进系统300(被标识为马达302、逆变器系统308和散热器310)的短舱904和具有桨叶俯仰机构908的螺旋桨902通过朝向短舱904后部定位的倾斜机构906相对于飞行器100的其余部分倾斜。
61.如下面所讨论的,在被集成到能够在向前构型与悬停构型之间配置的飞行器中的推进倾斜机构中的情况下,冷却子系统可以有利地利用在悬停构型下可用气流的增加。
62.图10a、图10b和图10c示出了根据一些示例的飞行器推进系统300和相关部件例如螺旋桨902相对于短舱1004的倾斜。如图10b和图10c中可以看到的,在该示例中,飞行器推进系统300(被标识为马达302、逆变器系统308和散热器310)和具有桨叶俯仰机构1008的螺旋桨1002通过朝向短舱1004前部定位的倾斜机构1006相对于短舱1004倾斜。
63.如作为悬停构型的图10c中可以看到的,散热器310被暴露于露天,而不是如在垂直构型中那样被包含在短舱1004内。这导致更多的气流通过散热器310,既有来自风扇312的气流,又有来自螺旋桨902的作为邻近气流的结果的气流。由于悬停具有比水平飞行更高的功率要求,因此通过使经过散热器310的气流增加来提供附加冷却可能是有利的。
64.系统和/或方法的实施方式可以包括各种系统部件和各种方法过程的每个组合和排列,其中,可以通过和/或使用本文中所描述的系统、元件和/或实体的一个或更多个实例来异步地(例如,顺序地)、并发地(例如,并行地)或者以任何其他合适的顺序来执行本文中所描述的方法和/或过程的一个或更多个实例。
65.在涉及推力生成元件时,本文中所使用的术语“旋翼”可以指旋翼、螺旋桨和/或任何其他合适的旋转空气动力学致动器。虽然旋翼可以指使用铰接式或半刚性桨毂(例如,其中桨叶与桨毂的连接可以是铰接的、柔性的、刚性的和/或以其他方式连接的)的旋转空气动力学致动器,并且螺旋桨可以指使用刚性桨毂(例如,其中桨叶与桨毂的连接可以是铰接的、柔性的、刚性的和/或以其他方式连接的)的旋转空气动力学致动器,但是当在本文中使用时并不明确或暗指这样的区别,并且对“旋翼”的使用可以指铰接式或刚性桨叶的任何构
型和任何其他合适的构型,以及/或者桨叶到中心构件或桨毂的连接的任何其他合适的构型。同样地,对“螺旋桨”的使用可以指铰接式或刚性桨叶的任何构型和任何其他合适的构型,以及/或者桨叶到中心构件或桨毂的连接的任何其他合适构型。因此,倾转旋翼飞行器可以被称为倾转螺旋桨飞行器(tilt-propeller aircraft)、倾转螺旋桨飞行器(tilt-prop aircraft)和/或以其他方式适当地提及或描述。
66.本文中所使用的术语“板”是指控制板、逆变器板或其他板,优选地是指电路板。更优选地,“板”是指印刷电路板(pcb)和/或其上组装的电子部件,其可以共同形成印刷电路板组件(pcba)。在第一示例中,控制板是pcba。在第二示例中,每个逆变器板是pcba。然而,另外地或可替选地,“板”可以指单面pcb、双面pcb、多层pcb、刚性pcb、柔性pcb和/或可以具有任何其他合适的含义。
67.飞行器可以包括为致动器(例如,旋翼/螺旋桨、倾斜机构、桨叶俯仰机构、冷却系统等)提供动力的任何合适形式的动力存储装置或动力存储单元(电池、飞轮、超级电容器、电池、油箱等)。优选的动力/燃料源是电池,但是该系统可以合理地采用任何合适的动力/燃油源。飞行器可以包括辅助和/或冗余动力源(例如,备用电池、多个电池)或者不包括冗余动力源。飞行器可以以任何合适的电气架构或配置(例如,多个电池组、块、模块、电池单元等;呈串联和/或并联架构的任何组合)采用具有任何合适电池单元化学成分(例如,锂离子、镍镉等)的电池。
68.在具体示例中,集成到电倾转旋翼飞行器中的系统包括多个可倾转旋翼组件(例如,六个可倾转旋翼组件)。电倾转旋翼飞行器可以作为固定翼飞行器、旋转翼飞行器操作,并且可以在处于固定翼状态与旋转翼状态之间的任何阈限构型(例如,其中多个可倾转旋翼组件中的一个或更多个可倾转旋翼组件被定向成处于部分旋转状态)下操作。在该示例中,电倾转旋翼飞行器的控制系统可以用于命令和控制多个可倾转旋翼组件处于固定翼布置和旋转翼布置内和/或处于固定翼布置与旋转翼布置之间。
69.本文中所使用的术语“基本上”可以意指:确切地、近似地、在预定阈值或公差内和/或具有任何其他合适的含义。
70.替选实施方式在存储计算机可读指令的非暂态计算机可读介质中实现上面的方法和/或处理模块。指令可以由与计算机可读介质和/或处理系统集成的计算机可执行部件来执行。计算机可读介质可以包括任何合适的计算机可读介质,例如ram、rom、闪存、eeprom、光学装置(cd或dvd)、硬盘驱动器、软盘驱动器、非暂态计算机可读介质或任何合适的装置。计算机可执行部件可以包括连接至非暂态计算机可读介质的计算系统和/或处理系统(例如,包括一个或更多个并置或分布式、远程或本地处理器),例如cpu、gpu、tpus、微处理器或asic,但是可替选地或另外地,指令可以由任何合适的专用硬件设备执行。
71.系统和/或方法的实施方式可以包括各种系统部件和各种方法过程的每个组合和排列,其中,可以通过和/或使用本文中所描述的系统、元件和/或实体的一个或更多个实例异步地(例如,顺序地)、并发地(例如,并行地)或者以任何其他合适的顺序来执行本文中所描述的方法和/或过程的一个或更多个实例。
72.如本领域技术人员将根据先前的详细描述以及附图和权利要求认识到的,在不脱离所附权利要求中限定的本发明的范围的情况下,可以对本发明的实施方式进行修改和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1