能够悬停的可转换的飞行器的系列和用于构造能够悬停的可转换的飞行器的方法与流程
本发明涉及飞行器的系列,其可在悬停飞行或沿着主要竖直轨迹飞行的第一构造与第二向前飞行或巡航构造之间转换。本发明还涉及一种用于构造可转换的飞行器的方法。
背景技术:
1、在航空领域,飞机通常用于高巡航速度(特别是大于150节)和高海拔(例如,高于30,000英尺)。在巡航速度和高海拔下,飞机使用固定翼来产生维持飞机所需的升力。只有通过使飞机在相当长的跑道上加速才能获得该升力的足够值。这样的跑道对于允许该相同的飞机着陆也是必要的。
2、相比之下,直升机的巡航速度通常比飞机低,并且直升机通过主旋翼桨叶的旋转产生维持所需的升力。因此,直升机无需水平速度并使用特别小的表面即可着陆/起飞。此外,直升机能够以相对较低的海拔和速度悬停和飞行,因此操纵特别灵活,适合高要求的操纵,例如在山区或海上救援人员。
3、然而,直升机在最大作业高度(约20000英尺)和最大作业速度(不能超过150节)方面存在固有的限制。
4、为了满足对具有与直升机相同的操纵灵活性和使用灵活性的飞行器的需求并且同时克服上述固有限制,已知了垂直升降飞机,其构成一种类型的可转换的飞行器。
5、专利申请us-b-10,011,349中描述了垂直升降飞机的例子。
6、更详细地,上述申请中描述的垂直升降飞机主要包括:
7、-沿着纵向的第一轴线延伸的机身;以及
8、-一对半机翼,它们从机身的彼此相对的相应的部分成悬臂突出,并且具有与机身相对并且沿着与纵向的第一轴线基本上正交的横向的第二轴线对齐的相应的自由端部。
9、该垂直升降飞机还包括:
10、-容纳相应的马达的一对发动机舱;以及
11、-一对旋翼,它们能围绕相应的第三轴线旋转并且可操作地连接至相应的马达。
12、旋翼能围绕第四轴线相对于机翼倾斜,第四轴线优选地平行于第二轴线。
13、垂直升降飞机还能够选择性地呈现:
14、-第一“直升机”构造,其中旋翼布置成相应的第三轴线基本上竖直并与垂直升降飞机的第一轴线正交并且与相应的马达正交;或者
15、-第二“飞机”构造,其中旋翼布置成相应的第三轴线基本上平行于相同的垂直升降飞机的第一轴线并且与相应的发动机同轴。
16、最近,已经开发出几项关于采用电力推进的可转换的飞行器的提案。
17、其中,专利申请wo-a-2020/105045描述了一种可转换的飞行器,其主要包括:
18、-沿着飞行器的纵向方向伸长的机身;
19、-从机身的相应侧成悬臂突出的一对半机翼;以及
20、-机尾的由形成v形的两个空气动力学表面形成的部分。
21、wo-a-2020/105045中描述的飞行器还包括:
22、-两对第一旋翼,这两对第一旋翼的轴线相对于机身固定,并且这两对第一旋翼布置成形成围绕飞行器重心的多边形;
23、-两对第二旋翼,这两对第二旋翼的轴线相对于机身倾斜。
24、更详细地,第一旋翼和第二旋翼可彼此独立地控制,以便提供可彼此独立地调节的相应的第一推力和第二推力。
25、一对第二旋翼布置在相应的半机翼的自由端部,而另一对第二旋翼布置在机尾部分的相应的空气动力学表面的自由端部。
26、第二旋翼能在第一位置和第二位置之间倾斜,在第一位置,相应的第二轴线布置成与飞行器的纵向方向正交并提供竖直推力,在第二位置,相应的第二轴线布置成与飞行器的纵向方向平行并提供与飞行器的前进方向平行的推力。
27、因此,飞行器可以选择性地呈现:
28、-第一构造,其中第二旋翼布置在第一位置并与第一旋翼配合以提供维持飞行器所需的竖直推力;以及
29、-第二构造,其中第二旋翼布置在第二位置并提供使飞行器向前移动所需的水平推力,而第一旋翼和半机翼提供维持飞行器所需的竖直推力。
30、本领域需要实现一种能够简单地重新构造且操作尽可能少的可转换的飞行器,以便能够执行长距离任务或能够减少消耗或能够实现高性能飞行。
31、us-a-2020/361601、us-a-2019/233107、us-a2018/233107、us-a-2019/144108和ep-a-3597528公开了根据权利要求1的前序部分的可转换的飞行器的系列以及根据权利要求6的前序部分的用于构造可转换的飞行器的方法。
技术实现思路
1、本发明的目的是实现可转换的飞行器的系列,其允许以简单且经济的方式满足上述需求中的至少一个。
2、根据本发明,上述目的通过权利要求1所要求保护的可转换的飞行器的系列来实现。
3、本发明还涉及权利要求6所要求保护的用于构造可转换的飞行器的方法。
技术特征:
1.一种飞行器(1、1’)的系列,所述系列能够基于所述飞行器(1、1’)的运行需要而转换和构造成各自互不相同的架构;所述系列的每个所述飞行器(1、1’)包括:
2.根据权利要求1所述的系列,其特征在于,所述核心体(100)还包括:
3.根据权利要求2所述的系列,其特征在于,所述第一部分(11)和所述第二部分(17)限定从所述机身(2)的相应的侧壁(62)成悬臂突出的对应的所述半机翼(3)和所述空气动力学表面(9)的相应的根部部分;
4.根据权利要求2或3所述的系列,其特征在于,参照在使用中布置在所述第二构造的所述飞行器(1、1’)的正常飞行位置,每个所述飞行器(1、1’)的所述第二空气动力学表面(9)布置在所述半机翼(3)的前面。
5.根据前述任一项权利要求所述的系列,其特征在于,所述核心体(100)包括:
6.一种用于构造飞行器(1、1’)的方法,所述飞行器(1、1’)能基于所述飞行器(1、1’)的操作需要而构造成各自互不相同的架构;
技术总结
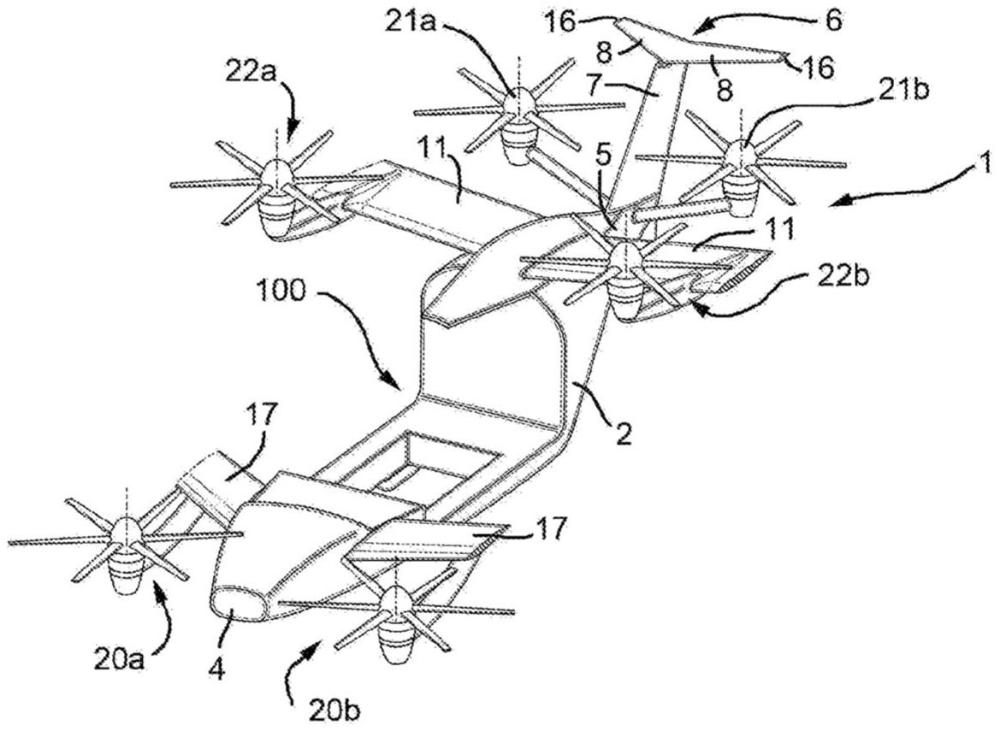
本发明描述了可转换的飞行器(1、1’)的系列,所述飞行器具有核心体(100)和限定第一轴线(Y)的机身(2);第一旋翼、第二旋翼、第三旋翼、第四旋翼、第五旋翼和第六旋翼(20a、20b、21a、21b、22a、22b)能围绕相应的第一轴线、第二轴线、第三轴线、第四轴线、第五轴线和第六轴线(B、C、D、E、F、G)旋转,并且能彼此独立地操作以相应地产生彼此独立的第一推力值、第二推力值、第三推力值、第四推力值、第五推力值和第六推力值(T1、T2、T3、T4、T5、T6);核心体(100)包括电源(81)和与所述第一旋翼、第二旋翼、第三旋翼、第四旋翼、第五旋翼和第六旋翼(20a、20b、21a、21b、22a、22b)连接的电动马达(72a、72b、73a、73b、74a、74b));该系列的每个飞行器(1、1’)包括与相应的架构相关联并与所述核心体(100)对接的模块(110、120、130、140)。
技术研发人员:里卡尔多·比安科·门戈蒂
受保护的技术使用者:列奥纳多股份公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!