一种固定翼飞行器空基循环回收系统
本发明涉及飞行器空基回收,尤其涉及一种固定翼飞行器空基循环回收系统。
背景技术:
1、随着技术进步和信息化作战的发展,无人机在整个装备体系中的地位和作用日益凸显,并正在从过去执行单一侦察任务向执行警戒、打击,乃至空战等高等级任务发展。随着新型传感器的研发和有效载荷的集成,导致大型无人机系统成本持续上涨,已经超过了可持续性发展的限制,而中小型无人机将以更低的作战成本为军方提供更为有力的支持,并将进一步支持编组、蜂群、忠诚僚机等新的作战概念,所以中小型战术无人机在今后的无人机体系中发挥的作用越来越重要。
2、目前尚未有成熟的空基平台的无人机回收方案,但是针对上述中小无人机在移动狭小平台上的循环回收问题,国内外研究机构已经提出了多种中小型无人机回收方案。例如伞回收,撞网回收,勾绳回收,吊臂回收等技术路线。但将上述方案直接应用在中小型无人机的空基平台回收仍存在许多缺点,例如撞网回收,吊臂回收装置体积大,很难应用在空间狭小的空基平台上;勾绳回收需要在回收的过程中留给钩住阻拦绳的无人机一定的缓冲空间,这在空基平台上几乎是不可能实现的。伞回收需要无人机携带降落伞,这对于载荷不是很大的中小型无人机无疑是雪上加霜,对于中小型无人机不是十分适用。并且由于空基平台的特殊性,通过人工将装置捕获的无人机回收到机舱再进行下一架次是不可能的。所以,与传统的陆地无人机回收不同,空基无人机回收还要求回收装置能够全自主地进行无人机循环回收。
技术实现思路
1、本发明的目的在于克服现有技术不足,提供一种固定翼飞行器空基循环回收系统,具有重量轻,结构紧凑,可实现循环回收的优点,可在占用空间有限的情况下获得较高的回收成功率和回收速度。
2、本发明具体采用以下技术方案解决上述技术问题:
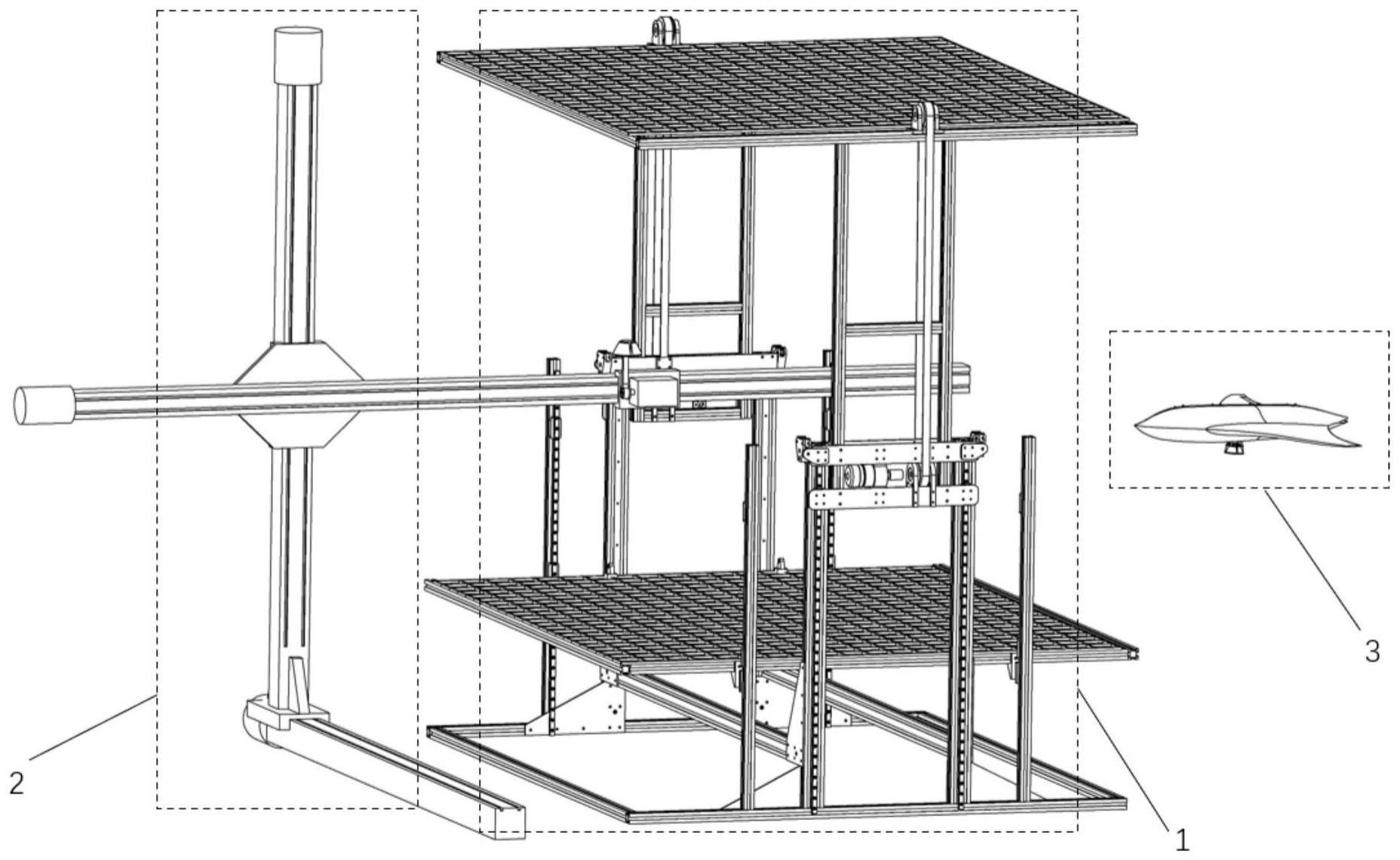
3、一种固定翼飞行器空基循环回收系统,包括循环回收装置和运输装置;所述循环回收装置包括下捕获机构、上捕获机构、驱动机构,下捕获机构与上捕获机构上分别设置有一张水平方向伸展的弹性网,两张弹性网对称设置并可在所述驱动机构的驱动下做竖直方向的相对运动;所述运输装置包括用于与所回收固定翼飞行器对接的对接器以及可控制对接器的空间位置以及与竖直方向夹角的移动机构。
4、优选地,所述下捕获机构包括:下回收框滑轨支架1201、下回收框弹性网1202、上回收框滑轨支架1203、下回收矩形框1204、横梁1206、底座1208、下回收框滑轨1209、垫块1210、下回收框滑块1211、矩形框连接件1212、上回收框滑轨1213;所述底座1208固定在母机机舱地面,用于固定整个装置;所述下回收框滑轨支架1201和上回收框滑轨支架1203竖直固定在底座1208上;所述下回收框滑轨1209和上回收框滑轨1213分别固定在下回收框滑轨支架1201和上回收框滑轨支架1203上;所述横梁1206两端固定在上回收框滑轨1303的下方;所述下回收框滑轨1209通过垫块1210固定到下回收框滑轨支架1201上;所述下回收框滑块1211通过矩形框连接件1212与下回收矩形框1204固连,并且所述下回收框滑块1211可以在下回收框滑轨1209上滑动;所述下回收框弹性网1202四周连接到下回收矩形框1204上,形成一个可移动的弹性面。
5、进一步优选地,所述上捕获机构包括:上回收矩形框1101、加强杆1102、上回收框支架1103、连接板1104、上回收框滑块1105、滑轮组1106、上回收框连线器1107、缆绳1108、下回收框连线器1109;所述上回收框支架1103竖直固定到上回收矩形框1101下半部分,所述加强杆1102固定在相邻两根回收框支架1103之间,形成一个c字形框架;所述上回收框滑块1105固定在连接板1104上,并可以在上回收框滑轨1213上滑动, c字形框架两侧的上回收框支架1103也分别固连在一对连接板1104上;所述上回收框连线器1107固定在最上面的连接板1104上,下回收框连线器1109固定在下回收矩形框1204上,滑轮组1106固定在上回收框滑轨支架1203侧面,缆绳1108穿过滑轮组1106,并且两端分别与上回收框连线器1107和下回收框连线器1109连接。
6、更进一步优选地,所述驱动机构包括:同步带1301、同步带锁定块1302、驱动轮1303、联轴器1304、电机笼1305、伺服电机1306、驱动轮轴承1307、驱动轮支架1308、惰轮1309、惰轮支架1310、惰轮轴承1311、光轴1312、锁定块支撑板1313;所述驱动轮轴承1307安装在驱动轮支架1308的轴承孔内,驱动轮支架1308的一侧固定到最下侧的加强杆1102上,另一侧固定到最下侧的连接板1104上;所述驱动轮1303的传动轴穿过两侧驱动轮支架1308里的轴承,并且通过联轴器1305与伺服电机1306输出轴连接;所述电机笼1305的两端分别固定到两个连接板1104上,伺服电机1306的电机壳固定在电机笼1305上;所述惰轮支架1310固定在上回收矩形框1101上,惰轮轴承1311安装在惰轮支架1310两侧的轴承孔内,惰轮1309位于惰轮支架1310中间,所述光轴1312穿过两颗惰轮轴承1311和惰轮1309的中心孔,使惰轮1309可以自由转动;所述同步带1301分别绕过驱动轮1103和惰轮1309,同步带锁定块1302锁定在同步带1301上,并与锁定块支撑板1313固连,使同步带被锁定处无法运动。
7、优选地,所述运输装置中的移动机构包括:x轴电动滑轨、x轴滑台、y轴电动滑轨、y轴滑台、z轴电动滑轨、z轴滑台、舵机;所述x轴电动滑轨固定在母机机舱内,并位于循环回收装置的后方,x轴滑台可在电机驱动下沿x轴电动滑轨运动;所述y轴电动滑轨竖直固定在x轴滑台上,y轴滑台可在电机驱动下沿y轴电动滑轨运动;所述z轴电动滑轨水平固定在y轴滑台上,z轴滑台可在电机驱动下沿z轴电动滑轨运动;所述舵机固定在z轴滑台上,所述对接器通过连杆与所述舵机的输出盘连接。
8、优选地,所述对接器为锥形对接器,其中间的圆柱空腔内固定有电磁铁。
9、优选地,所述循环回收装置还包括用于检测所回收固定翼飞行器是否进入回收区域的检测装置。
10、相比现有技术,本发明技术方案及其进一步优选方案具有以下有益效果:
11、本发明首次采用水平方向伸展的上下两张弹性网夹合的方式实现固定翼飞行器的空基捕获,并进一步采用双导轨结构和电机结合缆绳的驱动方案,在尽可能小的体积上获得了更大的回收空间,且降低了无人机回收时的控制精度,具有重量轻,结构紧凑的优点。
技术特征:
1.一种固定翼飞行器空基循环回收系统,其特征在于,包括循环回收装置和运输装置;所述循环回收装置包括下捕获机构、上捕获机构、驱动机构,下捕获机构与上捕获机构上分别设置有一张水平方向伸展的弹性网,两张弹性网对称设置并可在所述驱动机构的驱动下做竖直方向的相对运动;所述运输装置包括用于与所回收固定翼飞行器对接的对接器以及可控制对接器的空间位置以及与竖直方向夹角的移动机构。
2.如权利要求1所述固定翼飞行器空基循环回收系统,其特征在于,所述下捕获机构包括:下回收框滑轨支架(1201)、下回收框弹性网(1202)、上回收框滑轨支架(1203)、下回收矩形框(1204)、横梁(1206)、底座(1208)、下回收框滑轨(1209)、垫块(1210)、下回收框滑块(1211)、矩形框连接件(1212)、上回收框滑轨(1213);所述底座(1208)固定在母机机舱地面,用于固定整个装置;所述下回收框滑轨支架(1201)和上回收框滑轨支架(1203)竖直固定在底座(1208)上;所述下回收框滑轨(1209)和上回收框滑轨(1213)分别固定在下回收框滑轨支架(1201)和上回收框滑轨支架(1203)上;所述横梁(1206)两端固定在上回收框滑轨(1303)的下方;所述下回收框滑轨(1209)通过垫块(1210)固定到下回收框滑轨支架(1201)上;所述下回收框滑块(1211)通过矩形框连接件(1212)与下回收矩形框(1204)固连,并且所述下回收框滑块(1211)可以在下回收框滑轨(1209)上滑动;所述下回收框弹性网(1202)四周连接到下回收矩形框(1204)上,形成一个可移动的弹性面。
3.如权利要求2所述固定翼飞行器空基循环回收系统,其特征在于,所述上捕获机构包括:上回收矩形框(1101)、加强杆(1102)、上回收框支架(1103)、连接板(1104)、上回收框滑块(1105)、滑轮组(1106)、上回收框连线器(1107)、缆绳(1108)、下回收框连线器(1109);所述上回收框支架(1103)竖直固定到上回收矩形框(1101)下半部分,所述加强杆(1102)固定在相邻两根回收框支架(1103)之间,形成一个c字形框架;所述上回收框滑块(1105)固定在连接板(1104)上,并可以在上回收框滑轨(1213)上滑动, c字形框架两侧的上回收框支架(1103)也分别固连在一对连接板(1104)上;所述上回收框连线器(1107)固定在最上面的连接板(1104)上,下回收框连线器(1109)固定在下回收矩形框(1204)上,滑轮组(1106)固定在上回收框滑轨支架(1203)侧面,缆绳(1108)穿过滑轮组(1106),并且两端分别与上回收框连线器(1107)和下回收框连线器(1109)连接。
4.如权利要求3所述固定翼飞行器空基循环回收系统,其特征在于,所述驱动机构包括:同步带(1301)、同步带锁定块(1302)、驱动轮(1303)、联轴器(1304)、电机笼(1305)、伺服电机(1306)、驱动轮轴承(1307)、驱动轮支架(1308)、惰轮(1309)、惰轮支架(1310)、惰轮轴承(1311)、光轴(1312)、锁定块支撑板(1313);所述驱动轮轴承(1307)安装在驱动轮支架(1308)的轴承孔内,驱动轮支架(1308)的一侧固定到最下侧的加强杆(1102)上,另一侧固定到最下侧的连接板(1104)上;所述驱动轮(1303)的传动轴穿过两侧驱动轮支架(1308)里的轴承,并且通过联轴器(1305)与伺服电机(1306)输出轴连接;所述电机笼(1305)的两端分别固定到两个连接板(1104)上,伺服电机(1306)的电机壳固定在电机笼(1305)上;所述惰轮支架(1310)固定在上回收矩形框(1101)上,惰轮轴承(1311)安装在惰轮支架(1310)两侧的轴承孔内,惰轮(1309)位于惰轮支架(1310)中间,所述光轴(1312)穿过两颗惰轮轴承(1311)和惰轮(1309)的中心孔,使惰轮(1309)可以自由转动;所述同步带(1301)分别绕过驱动轮(1103)和惰轮(1309),同步带锁定块(1302)锁定在同步带(1301)上,并与锁定块支撑板(1313)固连,使同步带被锁定处无法运动。
5.如权利要求1所述固定翼飞行器空基循环回收系统,其特征在于,所述运输装置中的移动机构包括:x轴电动滑轨、x轴滑台、y轴电动滑轨、y轴滑台、z轴电动滑轨、z轴滑台、舵机;所述x轴电动滑轨固定在母机机舱内,并位于循环回收装置的后方,x轴滑台可在电机驱动下沿x轴电动滑轨运动;所述y轴电动滑轨竖直固定在x轴滑台上,y轴滑台可在电机驱动下沿y轴电动滑轨运动;所述z轴电动滑轨水平固定在y轴滑台上,z轴滑台可在电机驱动下沿z轴电动滑轨运动;所述舵机固定在z轴滑台上,所述对接器通过连杆与所述舵机的输出盘连接。
6.如权利要求1所述固定翼飞行器空基循环回收系统,其特征在于,所述对接器为锥形对接器,其中间的圆柱空腔内固定有电磁铁。
7.如权利要求1所述固定翼飞行器空基循环回收系统,其特征在于,所述循环回收装置还包括用于检测所回收固定翼飞行器是否进入回收区域的检测装置。
技术总结
本发明公开了一种固定翼飞行器空基循环回收系统,属于飞行器空基回收技术领域。该系统包括循环回收装置和运输装置;所述循环回收装置包括下捕获机构、上捕获机构、驱动机构,下捕获机构与上捕获机构上分别设置有一张水平方向伸展的弹性网,两张弹性网对称设置并可在所述驱动机构的驱动下做竖直方向的相对运动;所述运输装置包括用于与所回收固定翼飞行器对接的对接器以及可控制对接器的空间位置以及与竖直方向夹角的移动机构。相比现有技术,本发明具有重量轻,结构紧凑,可实现循环回收的优点,可在占用空间有限的情况下获得较高的回收成功率和回收速度。
技术研发人员:向玉龙,盛汉霖,黄锐,刘曜,刘祁
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!