可补偿附加质量惯性力的零重力环境模拟装置及方法
本发明属于航天工程微低重力模拟试验领域,更具体地,涉及一种可补偿附加质量惯性力的零重力环境模拟装置及方法。
背景技术:
1、外太空与其他星体表面的微低重力环境会使航天器的机械性能和控制性能受到无法预估的影响,为了提高航天器在太空执行任务的安全性和可靠性,地面微低重力环境模拟技术十分重要。
2、目前,主流的微低重力模拟有两种构型,一是基于悬吊摆机构的悬吊模拟方法,一是基于气浮平台的支承模拟方法。这两种方法均可对体积较大的物体进行较长时间的微重力模拟试验,并且单次试验成本低,易实施。但是不论是悬吊模拟方法还是支承模拟方法,垂向上的重力卸载都是实现六自由度高保真模拟的关键。
3、文献资料表明:目前恒力支承/悬吊机构比较主流的有配重法、恒力气缸法、刚性驱动+弹性缓冲元件力反馈法等,它们可不同程度地补偿航天器所受到的重力,但是配重法会导致附加质量的成倍增加,恒力气缸由于气体的强可压缩性会导致非线性控制问题和时滞问题。目前国内主要采用刚性驱动+弹性缓冲元件力反馈法,但其主要受制于力传感器的精度限制,无法在吨级负载的情况下做到牛级的恒力控制。
4、无论是采用何种机构卸载重力和释放自由度,支承单元的部分结构必然与航天器“绑定”,这部分附加质量会影响航天器的微重力模拟精度。基于气浮平台的支承方法在平动自由度上的附加质量占比有时甚至能超过50%,由此造成的微低重力模拟失真问题十分显著。
5、因此,需要一种基于位置控制的、高精度、高响应速度的微重力模拟装置,并且能补偿其附加质量惯性力的方法。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种可补偿附加质量惯性力的零重力环境模拟装置及方法,通过总体的设计,设置有近零刚度支承组件、运动跟随组件、可调气浮平台组件和惯性力补偿组件,其能补偿附加质量惯性力,还能实现位置可控制,而且具有高精度和高响应速度。
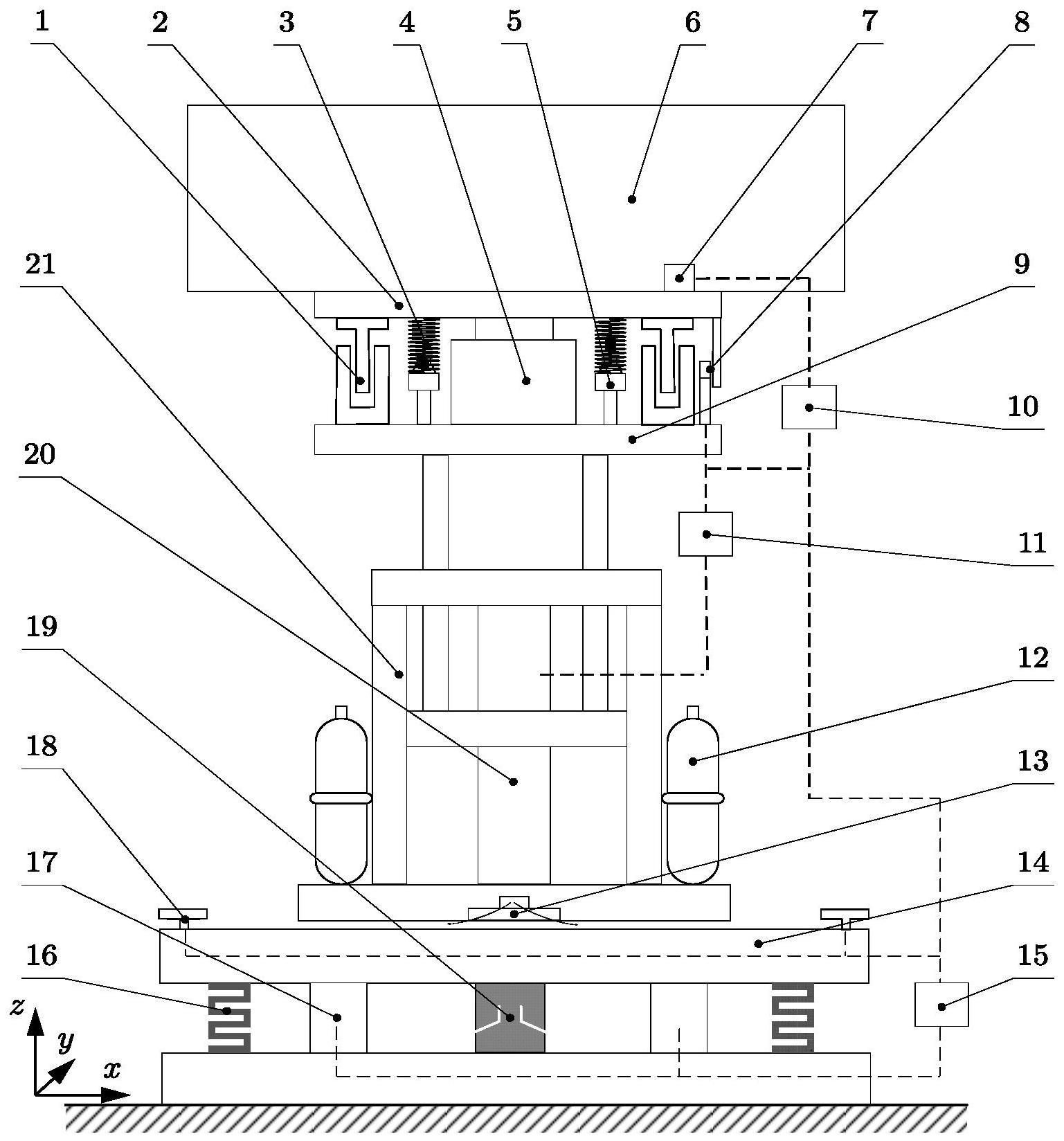
2、按照本发明的一个方面,提供一种可以补偿x向、y向、z向三个平动方向惯性力的零重力环境模拟装置,其包括近零刚度支承组件、运动跟随组件、可调气浮平台组件和惯性力补偿组件。近零刚度支承组件与运动跟随组件上下连接形成串联结构,所述串联结构通过气浮支承方式浮动设置在可调气浮平台组件上,惯性力补偿组件同时设置在近零刚度支承组件和运动跟随组件上,工作时,外界的负载设备固定或铰接在近零刚度支承组件上,可调气浮平台组件用于调整装置倾角,补偿水平两个自由度的附加质量惯性力,惯性力补偿组件用于监测装置运动状态并控制运动跟随组件和可调气浮平台组件以补偿三个自由度的附加质量惯性力。
3、进一步的,所述近零刚度支承组件包括顶板、底板、近零刚度弹性元件、气浮导轨和位移传感器。顶板与底板相互平行,顶板与外界的负载设备连接一以支撑外界的负载设备,近零刚度弹性元件设置在顶板和底板之间,其由正刚度元件和负刚度元件并联而成,能够实现大承载的同时,实现无摩擦的近零刚度。气浮导轨设置在近零刚度支承组件中央处,并位于顶板和底板之间,用于实现顶板和底板之间的无摩擦运动,并限制除垂向自由度以外的其他自由度,位移传感器布置在顶板与底板之间,用于监测近零刚度弹性元件的高度变化。
4、进一步的,所述正刚度元件为金属螺旋弹簧;所述负刚度元件为无摩擦的磁负刚度件;所述位移传感器为光栅尺位移传感器、激光位移传感器或/和电涡流传感器。
5、进一步的,所述正刚度元件一端连接顶板,另一端连接有高度调节机构的一端,高度调节机构的另一端连接底板,所述高度调节机构用于调节近零刚度支承组件的初始预紧力,改变近零刚度弹性元件所提供的支承力,以能够调整顶板的浮起高度,从而调整负刚度元件的工作点位。所述高度调节机构为螺母螺杆机构或者液压机构。
6、进一步的,所述运动跟随组件包括恒力控制器和直线运动机构,直线运动机构与底板固连,恒力控制器通过接收所述位移传感器的反馈信号,驱动控制直线运动机构,保证顶板和底板之间的相对位移恒定,使得近零刚度弹性元件的形变近零,从而保证顶板对负载设备的支承力波动近零。所述直线运动机构为滚珠丝杠直线运动机构。
7、进一步的,可调气浮平台组件整体设置在外界的地基上,所述可调气浮平台组件包括气浮轴承、气浮平台、姿态角测量单元和十字柔性铰链,直线式柔性快、压电作动器和姿态角控制器组成。气浮轴承设置在气浮平台上面,用于连接调气浮平台组件和运动跟随组件,十字柔性铰链分别与气浮平台底部和地基连接且位于气浮平台和地基之间,且位于靠气浮平台的中央处,十字柔性铰链用于限制气浮平台除绕x轴和y轴转动以外的自由度,直线式柔性块同样设置在气浮平台底部和地基之间且位于靠气浮平台的边缘处。直线式柔性块在纵向伸缩刚度、以及在绕x轴和y轴转动的刚度均较低,与十字柔性铰链组合能够释放气浮平台绕x轴和绕y轴转动的自由度。压电作动器同样设置在气浮平台和地基之间,并且和十字柔性铰链、直线式柔性块相平行,同时位于十字柔性铰链和直线式柔性块两者之间,姿态角测量单元设置在气浮平台的边缘处,姿态角测量单元用于实时监测气浮平台的姿态角信号,姿态角控制器用于接收姿态角测量单元实时监测获取的气浮平台的姿态角信号,还用于根据所述气浮平台的姿态角信号控制压电作动器实时调节气浮平台的姿态角。
8、进一步的,所述十字柔性铰链、直线式柔性块、压电作动器和气浮平台的组合可以替换为任意能实现高精度调节倾角的气浮平台。
9、进一步的,所述姿态角测量单元为激光跟踪仪或/和高精度陀螺仪。
10、进一步的,所述惯性力补偿组件包括惯性力补偿控制器和负载加速度传感器,负载加速度传感器安装在外界的负载设备上,其与惯性力补偿控制器相连,负载加速度传感器用于实时监测负载设备的加速度信号,并将该信号传递给惯性力补偿控制器,惯性力补偿控制器同时连接着运动跟随组件和可调气浮平台组件。
11、进一步的,所述负载加速度传感器为三轴加速度传感器,具有至少一个,安装在负载设备上或者近零刚度支承组件的顶板上,用于监测负载设备的加速度的变化,从而能够计算出需要补偿的附加质量的惯性力。
12、进一步的,所述负载加速度传感器应采用轻柔线缆,避免给负载设备的零重力或微低重力环境模拟带来扰动影响。
13、进一步的,所述负载加速度传感器实时监测负载设备三个方向上的加速度,并将监测信号传输至惯性力补偿控制器,惯性力补偿控制器根据竖直方向的加速度信号生成惯性力补偿的位移信号,所述恒力控制器连接惯性力补偿控制器,以能根据所述惯性力补偿的位移信号调整顶板和底板之间的相对位移,从而改变顶板对负载设备的支承力从而能补偿竖直方向上附加质量的惯性力,惯性力补偿控制器还用于根据水平方向的加速度信号生成惯性力补偿的角度信号,姿态角控制器连接惯性力补偿控制器,以能使姿态角控制器根据惯性力补偿的角度信号调节气浮平台的倾角,此外,利用负载装置的重力在水平方向的分力来补偿水平方向上附加质量的惯性力。
14、按照本发明的第二个方面,采用上述装置实现零重力环境模拟的惯性力补偿方法,具体包括下述步骤:
15、s1:在地表重力环境中将待模拟的负载设备固定或铰接在顶板上;
16、s2:启动姿态角控制器,通过压电作动器将气浮平台调至水平状态;
17、s3:给气浮导轨和气浮轴承通气,释放近零刚度支承组件垂向运动的自由度,同时释放位于气浮平台上所有组件在水平方向运动的自由度,位于气浮平台上的所有组件浮在气浮平台上;
18、s4:通过高度调节机构改变正刚度元件的支承力,直至顶板被顶起,支承力全部由近零刚度弹性元件提供,继续调节高度调节机构,使顶板缓缓升起,直至负刚度元件工作在设计零点附近;
19、s5:启动直线运动机构,根据位移传感器监测的近零刚度弹性元件的高度变化信号,恒力控制器驱动直线运动机构控制底板运动,使得近零刚度弹性元件高度变化收敛,使负载设备受到的支承力恒定,获得零重力环境下的加速度;
20、s6:启动惯性力补偿控制器,根据负载加速度传感器监测的负载设备的加速度变化信息,惯性力补偿控制器分别发送位移信号和角度信号,恒力控制器根据位移信号控制底板运动,通过改变近零刚度弹性元件的高度,改变支承力大小以补偿垂向惯性力,可调气浮平台根据角度信号调整气浮平台倾角,通过重力在水平方向上的分力以补偿水平方向惯性力,从而实现高保真的零重力模拟试验。
21、进一步的,s6中近零刚度弹性元件的高度改变量的获取方法为:测量近零刚度弹性元件的高度值与力的变化曲线,通过变化曲线的力信号获得近零刚度弹性元件的高度改变量。
22、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下
23、有益效果:
24、利用负载加速度传感器实时监测负载设备的加速度,通过运动跟随组件和可调气浮平台组件对装置的负载质量带来的附加惯性力进行补偿,大大提高了微低重力模拟试验的精度。具体的,惯性力补偿组件同时设置在近零刚度支承组件和运动跟随组件上,工作时,可调气浮平台组件用于调整装置倾角,补偿水平两个自由度的附加质量惯性力,惯性力补偿组件用于监测装置运动状态并控制运动跟随组件和可调气浮平台组件以补偿三个自由度的附加质量惯性力,从而实现高保真的零重力模拟试验。
- 还没有人留言评论。精彩留言会获得点赞!