一种飞行器制动控制方法和系统与流程
本申请属于机载系统集成领域,特别涉及一种飞行器的制动控制方法和系统。
背景技术:
1、近年来,全球冲偏出跑道事故的比率和数量保持稳定。数据显示,业界已有效地降低了商业航班冲偏出跑道事故的发生率,但事故和事故症候的绝对数量及其严重程度表明其风险程度仍然很高。主要的商用运输机制造商都已经在预防冲偏出跑道方面开展了相关的技术开发和专利布局,而且欧美以及中国的适航当局起动了预防冲偏出跑道的全球行动计划,因此开展有关的技术研究在当下以及未来的发展中尤为重要。
2、例如,专利us20080249675a1公开了一种刹车系统,通过飞行员选择不同的着陆系数来决定不同的刹车档位,再根据不同档位的刹车制动距离来选择跑道出口,并将相关的刹车信息反馈给显示终端。该专利公开了一种基于制动距离的制动控制方法并将此方法应用于一种特定形式的系统中。但是,所述专利需要对飞行员进行专门的培训才能选择正确的着陆系数,还需要对飞行系统进行定制,并且无法灵活调度跑道出口,不利于机场的调度安排。
3、专利us8275501b2也公开了一种在着陆阶段辅助飞机驾驶的方法和装置,该专利在考虑了飞机姿态和跑道环境状况的情况下,通过对飞机制动距离和备降跑道长度进行比较,来判别飞机是否有冲出跑道的危险并提供相应的预警。但所述专利也存在无法实时应对跑道突发情况的问题。
4、可见,尽管已经有不少文献提出了多种制动控制方案,但这些方案或多或少还存在不少问题需要解决。同时,国内在役、在研机型众多,均面临相关适航符合性的问题,因此,为了能在短周期内为在役飞机和在研飞机实现符合适航要求的预防冲偏出跑道功能,还需提供一套灵活通用的飞行器制动控制解决方案。
技术实现思路
1、本申请涉及一种全制动行程实时速度比较方案。该方案在飞行器在地面制动功能运行的全周期内,按照一种制动控制方法的实施步骤,来一步步地实现对飞行器的制动控制、过冲告警和过冲保护等功能。
2、根据本申请的第一方面,提供了一种用于飞行器的制动控制方法,包括:
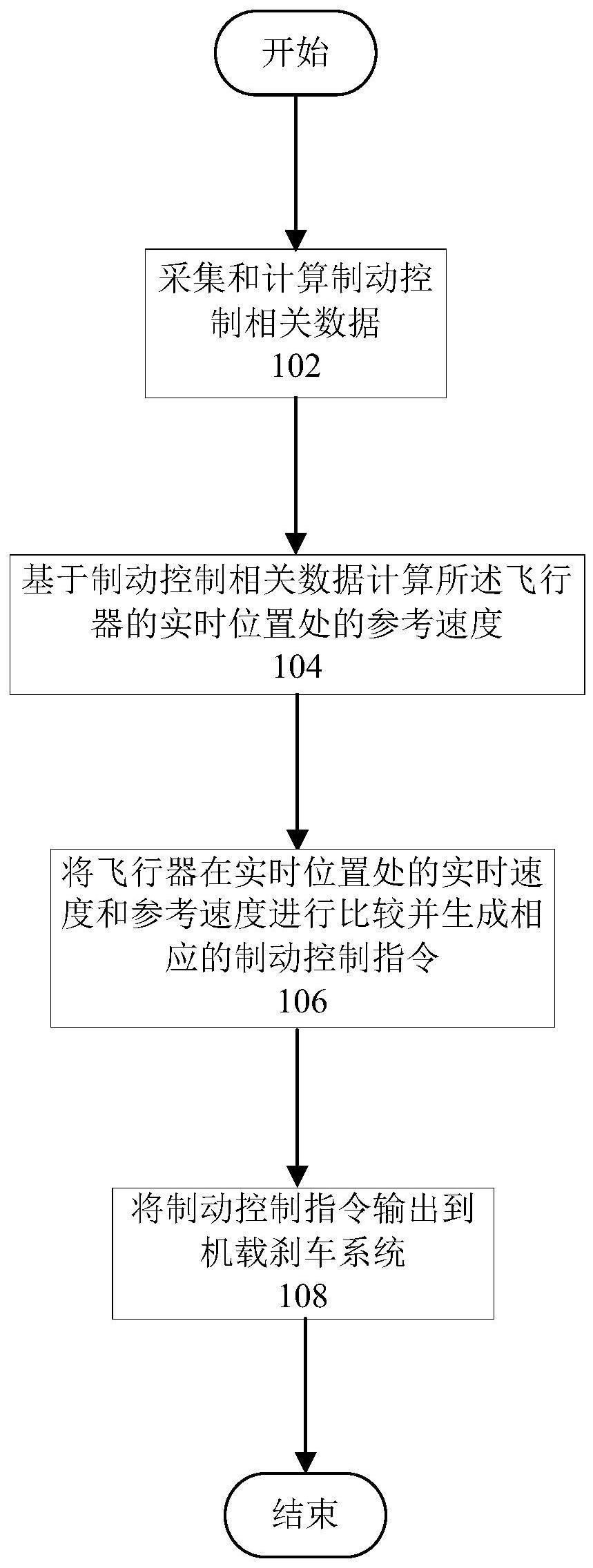
3、采集和计算制动控制相关数据,其中所述制动控制相关数据包括:基线减速度、出口预设速度、实时位置信息、距目标出口实时距离和实时速度以及其他数据;
4、基于所述制动控制相关数据计算所述飞行器在实时位置处的在所述距目标出口实时距离上以所述基线减速度减速至所述出口预设速度所需的速度作为参考速度;
5、将所述飞行器在所述实时位置处的所述实时速度和所述参考速度进行比较并生成相应的制动控制指令;
6、将所述制动控制指令输出到机载刹车系统。
7、根据本申请的第二方面,提供了一种用于飞行器的制动控制方法,包括:
8、采集和计算制动控制相关数据,其中所述制动控制相关数据包括:基线减速度、出口预设速度、实时位置信息、距目标出口实时距离和实时速度以及其他数据;
9、基于所述制动控制相关数据计算所述飞行器在实时位置处的所述实时速度下以所述基线减速度减速至所述出口预设速度所需的制动距离作为参考制动距离;
10、将所述飞行器在当前位置处的所述距目标出口的实时距离和所述参考制动距离进行比较并生成相应的制动控制指令;
11、将所述制动控制指令输出到机载刹车系统。
12、根据本申请的第三方面,提供了一种用于飞行器的制动控制方法,包括:
13、采集和计算制动控制相关数据,其中所述制动控制相关数据包括:基线减速度、出口预设速度、实时位置信息、距目标出口实时距离和实时速度以及其他数据;
14、基于所述制动控制相关数据计算所述飞行器在所述距目标出口实时距离上从所述实时速度制动到所述出口预设速度所需的实时减速度;
15、将所述飞行器的实时减速度和基线减速度进行比较并生成相应的制动控制指令;
16、将所述制动控制指令输出到机载刹车系统。根据本申请的第四方面,提供了一种用于飞行器的制动控制方法,包括:
17、采集和计算制动控制相关数据,其中所述制动控制相关数据包括:基线减速度、出口预设速度、实时位置信息、距目标出口实时距离和实时速度以及其他数据;
18、基于所述制动控制相关数据计算所述飞行器在所述距目标出口实时距离上从所述实时速度开始以基线减速度制动到所述目标出口处的参考速度;
19、将所述飞行器到所述目标出口处的参考速度与所述出口预设速度进行比较并生成相应的制动控制指令;
20、将所述制动控制指令输出到机载刹车系统。
21、提供本概述以便以简化的形式介绍以下在详细描述中进一步描述的一些概念。本概述并不旨在标识所要求保护主题的关键特征或必要特征,也不旨在用于限制所要求保护主题的范围。
技术特征:
1.一种用于飞行器的制动控制方法,包括:
2.如权利要求1所述的制动控制方法,其特征在于,所述基于所述制动控制相关数据计算所述飞行器的所述参考速度的步骤包括:基于速度方差公式计算出所述参考速度。
3.如权利要求1所述的制动控制方法,其特征在于,所述将所述飞行器在所述实时位置处的实时速度和所述参考速度进行比较并生成相应的制动控制指令的步骤包括:
4.一种用于飞行器的制动控制方法,包括:
5.如权利要求4所述的制动控制方法,其特征在于,所述基于所述制动控制相关数据计算所述飞行器的所述参考制动距离的步骤包括:基于速度方差公式计算出所述参考制动距离。
6.如权利要求1所述的制动控制方法,其特征在于,所述将所述飞行器在当前位置处的所述距目标出口的实时距离和所述参考制动距离进行比较并生成相应的制动控制指令的步骤包括:
7.一种用于飞行器的制动控制方法,包括:
8.如权利要求7所述的制动控制方法,其特征在于,所述基于所述制动控制相关数据计算所述飞行器的所述实时减速度的步骤包括:基于速度方差公式计算出所述实时减速度。
9.如权利要求7所述的制动控制方法,其特征在于,所述将所述飞行器的实时减速度和基线减速度进行比较并生成相应的制动控制指令的步骤包括:
10.一种用于飞行器的制动控制方法,包括:
11.如权利要求10所述的制动控制方法,其特征在于,所述基于所述制动控制相关数据计算所述飞行器到所述目标出口处的参考速度的步骤包括:基于速度方差公式计算出所述参考速度。
12.如权利要求10所述的制动控制方法,其特征在于,所述将所述飞行器到所述目标出口处的参考速度与所述出口预设速度进行比较并生成相应的制动控制指令的步骤包括:
13.如权利要求1、4、7、10中任一项所述的制动控制方法,其特征在于,所述基线减速度和出口预设速度是由机组来选择确定的;并且
14.如权利要求1、4、7、10中任一项所述的制动控制方法,其特征在于,所述方法还包括:
15.如权利要求1、4、7、10中任一项所述的制动控制方法,其特征在于,所述制动控制方法由所述飞行器的通用硬件来实现,具有良好的硬件兼容性,普遍适用于各种类型的飞行器。
技术总结
本申请涉及一种用于飞行器的制动控制方案,包括:采集和计算制动控制相关数据,其中所述制动控制相关数据包括:基线减速度、出口预设速度、实时位置信息、距目标出口实时距离和实时速度以及其他数据;基于所述制动控制相关数据计算所述飞行器在实时位置处的在所述距目标出口实时距离上以所述基线减速度减速至所述出口预设速度所需的速度作为参考速度;将所述飞行器在所述实时位置处的所述实时速度和所述参考速度进行比较并生成相应的制动控制指令;以及将所述制动控制指令输出到机载刹车系统。
技术研发人员:方钧华,杨浩,邓金萍
受保护的技术使用者:中国商用飞机有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!