分离速度可调节的小行星着陆机器人分离释放机构
本发明属于航天器机构,具体涉及一种分离速度可调节的小行星着陆机器人分离释放机构。
背景技术:
1、小行星探测是当今深空探测的前沿课题之一,可以为太阳系的形成及演化过程提供线索,对研究地球上的生物起源有重要指导意义。对地外小行星进行科学探测有多种方式,其中最直接有效的方式还是利用机器人进行着陆勘测。由于各类小行星表层结构特性差异很大,且地形相对复杂,相比较于大型探测器,高性价比、低任务风险的小型足式移动探测机器人成为国际上广泛认可的、极具前景的小行星着陆探测方案。
2、小行星着陆机器人通常作为有效载荷装载在小行星探测飞行器的内部,通过搭载小行星探测飞行器经过长时间的太空飞行抵达目标小行星后,再从探测飞行器内部分离并释放。也就是说,小行星着陆机器人在发射状态可以存储在小行星探测飞行器的舱内,在抵达目标小行星后再从舱内释放。因此,需要设计并研制一种小行星着陆机器人分离释放机构,以实现着陆机器人与探测飞行器之间的可靠连接、分离与释放。
3、目前,国内外针对小行星着陆机器人分离释放机构的设计研究还相对较少,但是现有技术资料中的立方星连接分离机构以及皮星轨道部署器等却可为机器人分离释放机构的设计与研制提供较好的借鉴和参考。
4、国外方面,美国加州理工大学是立方星概念提出方及立方星标准规范的制定者,按照其标准所设计的立方星需要使用标准化的释放装置,由此加州理工大学研发了一种多个皮卫星轨道部署器(poly-picosatellite orbital deployer,简称p-pod),p-pod是当前使用最为广泛的立方星释放装置之一。波兰科学院空间研究中心(src pas)与astronika公司共同研制了一种名为dragon的立方星释放装置,主要由推进平台、舱门和压紧与释放机构三部分组成。荷兰太空创新解决方案公司(innovative solutions in space,isis)于2000年以后开始研发立方星释放装置,该公司目前已开发了isipod(1u、2u、3u)、duopack(6u)和quadpack等3种立方星释放装置产品。美国nanoracks公司主要从事在国际空间站上释放立方星,并研制了相应的立方星释放装置nrcsd,nrcsd主要由阳极氧化铝板、底板组件、检修面板和舱门组成。
5、国内在立方星连接分离机构的设计方面有开展了一定的研究。上海宇航系统工程研究所(cn 111619830b)设计了一种立方星释放装置,实现了间歇释放立方星功能;文献cn107985635b公开了一种立方星在轨释放装置,具有手动装填立方星、电动释放立方星、手动释放立方星、可重复释放等功能;浙江大学的吴昌聚等人还设计了一种基于导轨结构的新型笼式皮卫星分离机构,成功实现了其自主研制的皮星1号a卫星(zdps-1a)在预定轨道的正常分离。
6、对于小行星表面着陆机器人,由于小行星表面的重力加速度通常非常微小,其分离速度是关系到着陆机器人能否被小行星成功捕获的关键因素,因此,在小行星着陆机器人的分离释放机构设计中,分离速度是一个至关重要的设计参数。然而,现有的相关航天分离释放机构中,并没有很好地考虑分离速度可调这一设计因素,一旦机构加工生产完毕,就无法实现分离速度的调节。
技术实现思路
1、本发明要解决的技术问题是克服现有技术的不足,提供一种结构简单……的冻干机。
2、为解决上述技术问题,本发明采用以下技术方案:
3、本发明的主要目的是提供一种分离速度可调节的小行星着陆机器人分离释放机构,旨在解决现有相关航天分离释放机构无法实现分离速度可调的问题。
4、为实现上述目的,本发明提出一种分离速度可调节的小行星着陆机器人分离释放机构,包括:
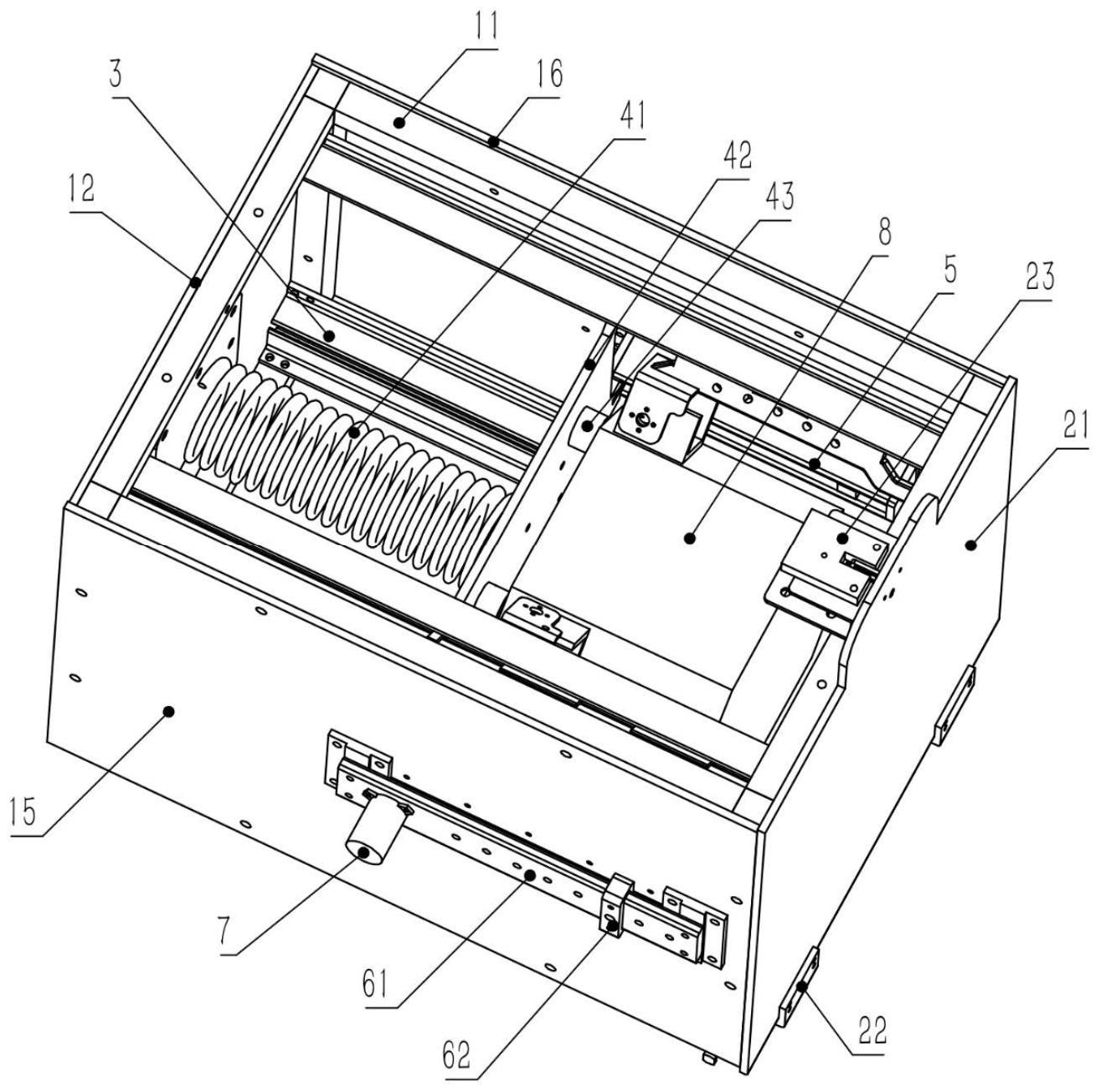
5、收纳箱体,包括主承力框架、后盖板、顶板、底板、左侧板和右侧板,用作各组成部件的承力和安装平台以及着陆机器人的收纳平台;
6、舱门装置,包括舱门本体、自锁定旋转铰链以及舱门锁紧与释放机构,为可转动部件;当舱门锁紧与释放机构收到解锁命令后,舱门锁紧与释放机构解除对舱门本体的锁紧约束,舱门本体在自锁定旋转铰链的作用下旋转打开至预设角度并保持位置不变;
7、滑轨结构,设置于收纳箱体内部且靠近收纳箱体四条侧棱的位置,为可滑动部件提供滑槽;
8、分离动力组件,包括弹簧、推板和支撑块,用于提供着陆机器人滑动的动力;所述弹簧设置在推板和后盖板之间,用于驱动着陆机器人分离;所述推板为可滑动部件,推板的四个角点上均设有滑动片,且推板左右两个侧壁的中心设有侧向伸出块;所述支撑块设置在推板上,着陆机器人收藏状态下支撑块与机器人顶面上的受力点保持面接触;
9、限位卡槽结构,设置在左侧板和右侧板的内表面,用于限制推板行程;所述推板的侧向伸出块位于限位卡槽结构内;
10、挡块定位结构,包括位置调整机构和挡块;所述挡块包括本体和一侧伸出体,挡块的本体位于位置调整机构上,能够发生水平位置移动,而挡块的一侧伸出体设置于限位卡槽结构的空腔内;所述位置调整机构能够调整挡块在限位卡槽结构内的位置,并保持位置的锁定;
11、运动解锁机构,设置在左侧板和右侧板的外表面,用于推板初始位置的锁定与解锁。
12、可选的,所述收纳箱体采用封闭式长方体金属箱结构;所述推板采用方形板状结构。
13、可选的,所述自锁定旋转铰链包括公铰链、母铰链、扭簧、旋转销轴、压缩弹簧、锁定销和拨杆;所述母铰链固定安装在底板上,公铰链连接舱门本体,公铰链在扭簧的作用下可绕旋转销轴发生转动;公铰链上还设有锁定孔,当舱门本体转动到预设角度后,锁定销在压缩弹簧提供的推力作用下落入锁定孔中,使自锁定旋转铰链保持锁定;所述拨杆用于将锁定销从锁定孔中拔出,实现对自锁定旋转铰链的解锁。
14、优选的,所述预设角度为120°。
15、可选的,所述舱门锁紧与释放机构采用电磁锁机构。
16、可选的,所述舱门锁紧与释放机构采用形状记忆分离螺母机构。
17、可选的,所述位置调整机构采用平行于收纳箱体侧板表面布置的直线导轨;在直线导轨表面开设有等间距的螺纹孔,在挡块表面开设有通孔,当挡块移动到直线导轨上理想的位置时,采用螺栓锁定的方式实现挡块的定位。
18、可选的,所述位置调整机构采用滚珠丝杆结构;滚珠丝杆结构包括丝杆、螺母座和固定座,螺母座为直线移动部件,挡块与螺母座固定连接,通过控制丝杆的旋转运动,实现挡块在限位卡槽结构中水平位置的调整。
19、可选的,所述运动解锁机构采用基于形状记忆合金的拔销器。
20、可选的,所述滑轨结构采用t形肋条式结构。
21、与现有技术相比,本发明技术方案取得的有益效果主要体现在以下几个方面:
22、首先,本发明采用了限位卡槽结构和挡块定位结构,通过调整与控制挡块结构在限位卡槽结构内的位置,实现对推板行程大小的调节与控制,从而改变分离动力组件中弹簧在分离过程中所释放的弹性势能,进而改变小行星着陆机器人的分离速度。因此,本发明具有小行星着陆机器人的分离速度可调节的优点;
23、其次,由于本发明的舱门装置中采用了一种自锁定旋转铰链,当舱门本体旋转到预设角度后,锁定销会落入公铰链的锁定孔中,从而使得舱门本体不再转动,因而本发明具有防止舱门反弹或晃动的作用;
24、再次,由于本发明设置了运动解锁机构,其可在检测到舱门本体打开且自锁定旋转铰链发生锁定后再启动工作,此时再解除对推板运动的限制,从而起到了有效避免因舱门本体来不及完全打开而导致着陆机器人与舱门本体发生碰撞的效果。
- 还没有人留言评论。精彩留言会获得点赞!