一种磁吸附式旋翼无人车检测系统
本发明涉及无人机检测,具体是涉及一种磁吸附式旋翼无人车检测系统。
背景技术:
1、在工业活动中,无人机在大型机器设备巡检、建筑物外墙检测等领域发挥着强大作用,但无人机耗能大且定性差。无人车在稳定性及可持续性上要优于无人机,但传统的无人车往往需要地面或空中支撑设备,限制了其在特殊环境下的应用。同时,在桥梁、船体等大体积设备表面,需要将无人车固定在表面上进行检测,而传统的无人车无法在表面上固定,也无法迅速地到达待检测表面。
2、目前的无人机吸附办法一般是真空吸附,如申请公告号为cn 110329495b的中国专利和申请公告号为cn213735518u的中国专利本质上利用的都是此种办法,即利用真空吸盘和气泵,在吸盘内部制造真空环境,利用吸盘内外的气压差实现无人机在物体表面的吸附,当无人机需要离开物体表面时,利用气泵泄气使吸盘脱落。但真空吸附对吸附表面的要求较高,若吸附表面的形状不规则,那么真空吸附的效果将大打折扣甚至失败。
3、现有技术中还有利用静电吸附的办法,即利用异种电荷相互吸引的原理,在无人机顶部装上电极,当需要吸附时,接通电路将无人机和吸附表面分别带上正负电荷,从而实现无人机的表面吸附,当无人机需要离开时,断开电路即可。但此静电吸附办法只适用于微型无人机,对于质量较大的无人机不适用。
4、现有技术中另一种新颖的无人机吸附方法,在无人机的侧面安装软性车轮,利用无人机的装配的水平电机提供贴紧墙壁的压力,利用垂直电机的动力带动无人机在墙面的移动,从而实现了无人机在墙体表面的吸附与移动。但此吸附方法耗能大,长时间工作下,无人机的续航无法保障。
5、申请公告号为cn215554106u的中国专利,提供了一种可吸附式悬停的多旋翼无人机,包括机体以及对称式连接于机体两侧的旋翼,所述机体的尾端通过连杆连接有电控永磁吸盘,机体需要悬停时,通过控制电流使电控永磁吸盘处于磁闭路状态,此时控制无人机尾部的吸盘接近并最终接触高处的钢铁构件表面,电控永磁吸盘可吸附于高处的钢铁构件上悬停,此时无人机旋翼停止旋转,电控永磁吸盘停止供电,无人机不再为悬停消耗电能,进而提高了无人机的滞空时间并有效提高机体首端安装的传感器的连续工作时间。该实用新型通过电控永磁吸盘实现无人机的稳定悬停,有效增加了无人机续航时间,但无法在待检测物体表面自由移动以实现全方位的检测。
6、申请公告号为cn216994850u的中国专利,提供了一种基于无人机的电磁吸附装置,包括无人机本体和阵列分布在其外侧的伸缩杆,每个伸缩杆外端都设有一个无刷电机,所述无刷电机的输出端设有叶片,每个无刷电机下端都设有一个支腿件,所述无人机本体下方设有一个用于吸附攀登工具的电磁块,所述电磁块与无人机本体之间设有用于传输电信号的导线组件,所述电磁块外侧设有用于防护的防护外壳,所述防护外壳外侧转动设有若干个牵引连杆,针对现有需要进行设计,实现对攀爬工具的转移,无需考虑对接问题,提高了操作的成功率。该实用新型通过电磁块实现了对攀爬工具的有效转移,但并未结合无人车的优势应用于检测领域。
7、申请公告号为cn215663986u的中国专利,提供了一种旋翼型无人飞车,包括无人车底盘组件和设于其正上方的旋翼组件,无人车底盘组件包括车架、头部车轮和尾部车轮,车架上设有伺服转向装置和车轮推进装置;旋翼组件包括t型机架,t型机架设有螺旋桨及驱动其旋转的旋转驱动装置,车架和机架之间通过立柱连接.该实用新型通过在无人车上设置旋翼组件,融合了无人车、无人机技术优势,扩展了自身可执行的任务种类,但并未结合磁力吸附装置的特点作业于检测领域。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种高强度、高精度、适应各种复杂环境的磁吸附式旋翼无人车检测系统。
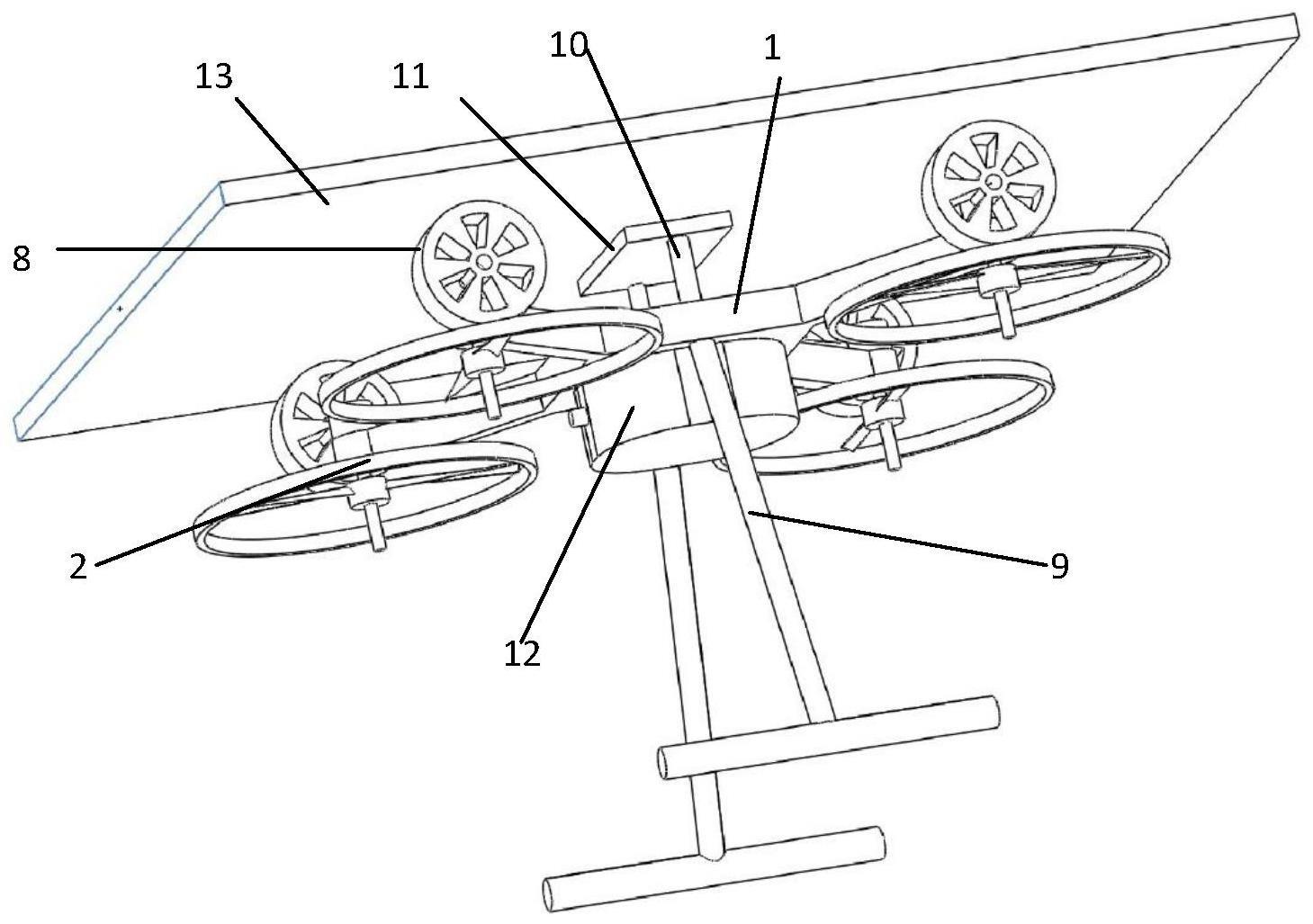
2、技术方案:为解决上述问题,本发明采用一种磁吸附式旋翼无人车检测系统,包括设置旋翼的机体,所述旋翼用于带动机体在空中运行,机体底部设置用于停放的支架,机体上设置车轮、驱动车轮转动的驱动装置、磁吸装置,所述车轮和磁吸装置位于机体同侧,且同时位于支架的相反侧,磁吸装置吸附磁性对象表面时,车轮与磁性对象表面接触,且驱动装置驱动车轮转动时,机体相对磁性对象表面运动。
3、进一步的,所述磁吸装置包括磁吸块和伸缩杆,所述伸缩杆一端与机体连接,另一端与磁吸块连接,伸缩杆伸缩带动磁吸块靠近或远离机体。
4、进一步的,所述磁吸装置包括设置于车轮上的均匀分布的若干磁吸块。所述磁吸块为电磁块。
5、该系统还包括检测分析系统,检测分析系统设置于机体上,检测分析系统包括高清摄像头、信号处理器和无线通信模块,所述高清摄像头用于摄取检测对象的图像,并将摄取的图像传输给信号处理器,信号处理器用于将接收到的图像进行处理并通过无线通信模块发送至后台。进行表面的裂纹检测任务时,操作人员在地面端,以地面控制系统为控制端、数据接收端和视频处理端,包括遥控器、数据接收模块和显示屏,利用遥控器遥控启动飞行系统,控制旋翼无人车到达指定的桥面待检测位置,需要对机体进行吸附时,操作人员遥控启动电磁吸附系统,电池提供的电流使电磁块带有磁吸力,调整好机体桥体表面的相对位置,将机体平滑吸附在桥体表面,随后启动无人车移动系统,控制无人车车轮在桥体表面行动,遥控启动检测分析系统,裂纹检测分析可分为图像采集、数据传输和裂纹检测三部分,采用高清摄像头作为图像采集平台,采用基于视频信号转换、无线信号传输和智能手机的无线数据传输方法,通过检测高清摄像头对表面进行裂纹检测并将采集到的数据信息传回到地面控制系统,使地面端接收高清摄像头的视频信号,记录并存储高清像素的视频,为进一步的裂纹分析提供了数据基础。
6、该系统还包括地面控制系统,所述机体上还包括指令执行系统,地面控制系统用于向指令执行系统发送控制指令,指令执行系统控制旋翼的启停和飞行方向、控制车轮的启停和运行方向、控制磁吸装置的吸附和放开。在使用时,可通过遥控器操控无人车的起飞、降落、悬停和飞行等动作以及磁吸附装置的开启和关闭。进行无人车检测任务时,地面控制系统向飞行系统发送指令,飞行系统接收到指令后,自主飞行或者遥控飞行到达指定检测位置。到达指定位置后,启动电磁吸附系统,将旋翼无人车吸附在待检测物体表面。之后启动无人车移动系统,控制旋翼无人车在待检测表面移动,检测物体表面的裂纹等缺陷信息。
7、进一步的,所述旋翼周身设有防护罩,确保旋翼安全工作,提高飞行安全性,防止在狭隘环境中进行检测任务时,旋翼与周围环境发生碰撞导致机体损坏。
8、进一步的,所述机体底部设置支架,用于稳定停放所述的磁吸附式旋翼无人车。若需要跨越障碍去别处检测,地面控制系统可以向飞行系统发送指令,飞行系统调整旋翼无人车的位置,跨越障碍。
9、进一步的,所述机体采用轻质材料,包括碳纤维、铝合金,具有良好的强度和刚度,同时可以降低无人车的重量。
10、进一步的,所述旋翼设置负载传感器,负载传感器用于检测旋翼的状态。该传感器可以检测旋翼的状态,并向无人机控制装置提供实时的数据反馈。
11、进一步的,所述磁吸装置还设置散热装置,防止电磁块在工作时温度过高引发故障。
12、有益效果:本发明相对于现有技术,其显著优点是通过磁吸附装置,使得旋翼无人车能够吸附在铁磁性表面上进行自主运动和检测,具有较高的安全性和稳定性。同时,所述的磁吸附式旋翼无人车的结构简单、紧凑,重量轻,搭载能力强,能够适应各种复杂环境下的实际应用需求。
13、在实际应用中,本发明的可电磁吸附的旋翼无人车可以广泛应用于建筑物、桥梁、船舶等领域的检测和维护、危险区域的勘测等。例如,在铁磁性建筑物表面,磁吸附式旋翼无人车可以利用其电磁吸附装置,在建筑物表面上进行检测和维护工作,可以避免工人高空作业的风险,提高检测效率。
- 还没有人留言评论。精彩留言会获得点赞!