一种四旋翼无人机的跟踪控制器设计方法
本发明涉及四旋翼无人机,具体而言,涉及一种四旋翼无人机的有限时间预设性能弹性轨迹跟踪控制器设计方法。
背景技术:
1、四旋翼无人机在巡逻、地形探索以及人员搜救等方面的突出表现,引起广泛的关注。需要明确的是,四旋翼无人机按照参考轨迹精确飞行是完成上述复杂工作的基础。然而,四旋翼无人机难以避免受到自身强耦合性、不确定性和外部未知扰动的影响,使其跟踪控制器的设计更为复杂,如果没有到达预计跟踪精度,将会带来严重的经济和安全事故。此外,四旋翼无人机的暂态性能也是轨迹跟踪控制问题中重要性能指标,较小的超调量、快速地收敛时间以及较小的稳态误差使得四旋翼无人机迅速、平稳地跟踪参考轨迹。申请公布号为cn 113238552 a的发明专利申请针对四旋翼无人机姿态子系统设计一种基于预设性能控制的预设时间跟踪控制方法,实现预设时间内的跟踪误差收敛约束,但是四旋翼无人机的外环位置子系统影响内环姿态子系统的跟踪性能,该方案仅仅关注四旋翼无人机姿态子系统的跟踪控制问题。申请公布号为cn 112631316 a的发明专利申请针对变负载四旋翼无人机设计有限时间控制方案,但没有考虑到姿态子系统和位置子系统跟踪误差的暂态性能。此外,申请公布号为cn 113238552 a和申请公布号为cn 112631316 a发明专利申请都是基于时间触发通讯策略,控制信号持续地更新,大量消耗有限的机载网络通讯资源,造成执行器的机械磨损;更重要的是,上述发明专利无法保障执行器故障时,四旋翼无人机能够安全、精确地跟踪参考轨迹。
2、因此,亟需设计一种理想轨迹跟踪控制器以提高四旋翼无人机的暂态和稳态性能,并且在机载网络通信带宽受限和执行器故障的情况下,仍然精确地跟踪参考轨迹。
技术实现思路
1、本发明在于提供一种四旋翼无人机的有限时间预设性能弹性轨迹跟踪控制器设计方法,其能够缓解上述问题。
2、为了缓解上述的问题,本发明采取的技术方案如下:
3、本发明提供了一种四旋翼无人机的跟踪控制器设计方法,包括以下步骤:
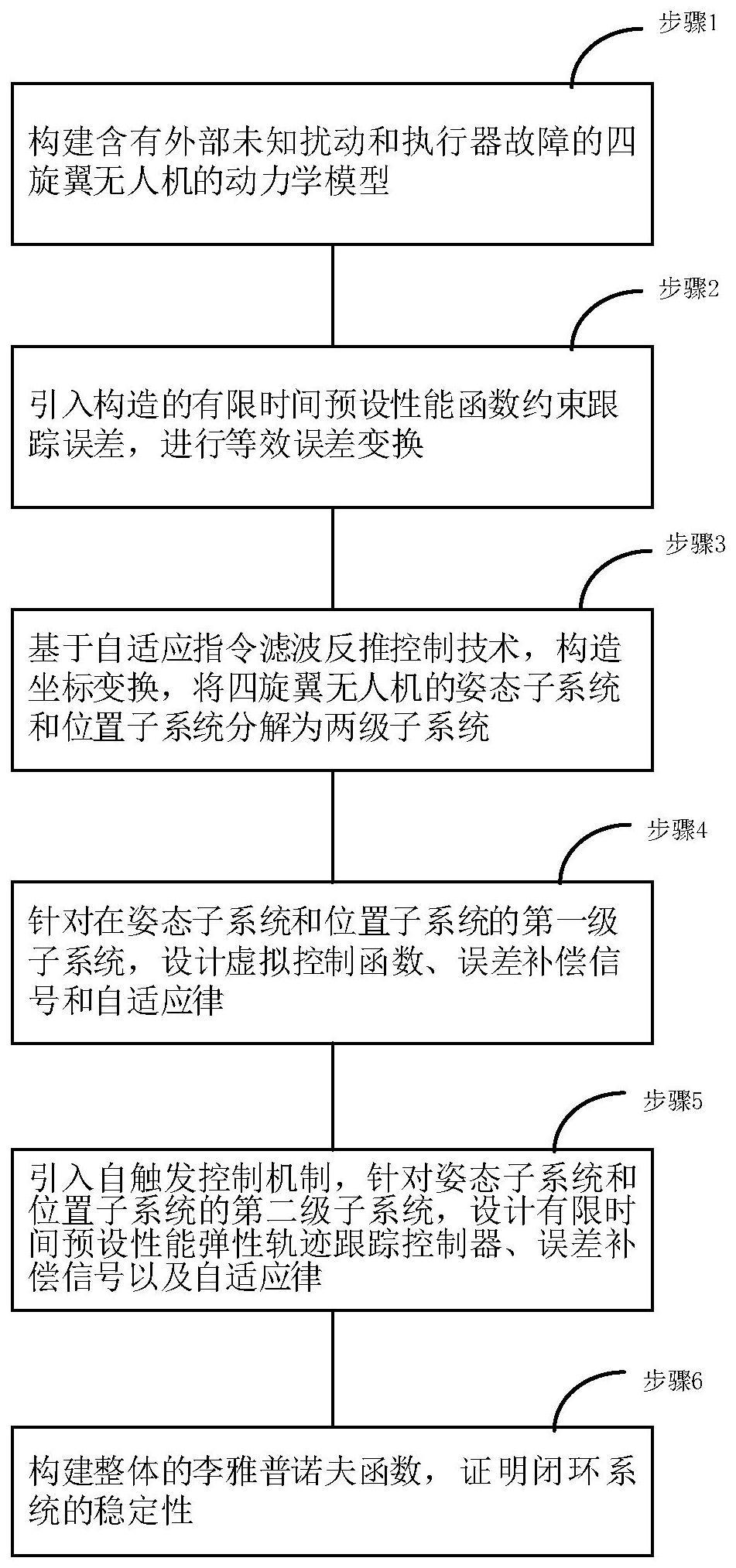
4、s1、建立含有外部未知扰动和执行器故障的四旋翼无人机动力学模型,根据四旋翼无人机动力学模型得到四旋翼无人机的状态空间方程;
5、s2、构建有限时间预设性能函数约束跟踪误差e1i(t),并进行等效误差变换,将受不等式约束的跟踪误差e1i(t)转换为不受约束的等效误差εi(t),跟踪误差e1i(t)与四旋翼无人机的状态空间方程匹配;
6、s3、基于等效误差εi(t)和自适应指令滤波反推控制方法,构造坐标变换方程,将四旋翼无人机的姿态子系统和位置子系统分解为两级子系统;
7、s4、基于坐标变换方程,针对四旋翼无人机姿态子系统和位置子系统的第一级子系统构造李雅普诺夫函数vi,1,设计虚拟控制函数αi、误差补偿信号κi,1、自适应律以及自适应律使得四旋翼无人机姿态子系统和位置子系统的第一级子系统趋于有限时间稳定,获得待设计的控制器增益,通过李雅普诺夫函数vi,1的时间导数确认设计的虚拟控制函数αi、误差补偿信号κi,1、自适应律以及自适应律是否使得四旋翼无人机姿态子系统和位置子系统的第一级子系统趋于有限时间稳定;
8、s5、针对四旋翼无人机姿态子系统和位置子系统的第二级子系统构造李雅普诺夫函数vi,引入自触发控制机制,设计有限时间预设性能弹性轨迹跟踪控制器ωi(t)、误差补偿信号κi,2、自适应律以及自适应律使得四旋翼无人机姿态子系统和位置子系统的第二级子系统趋于有限时间稳定,获得待设计的控制器增益,通过李雅普诺夫函数vi的时间导数确认设计的有限时间预设性能弹性轨迹跟踪控制器ωi(t)、误差补偿信号κi,2、自适应律以及自适应律是否使得四旋翼无人机姿态子系统和位置子系统的第二级子系统趋于有限时间稳定;
9、s6、针对四旋翼无人机姿态子系统和位置子系统构建整体的李雅普诺夫函数
10、
11、基于李雅普诺夫函数有限时间稳定理论,确定设计的有限时间预设性能弹性轨迹跟踪控制器ωi(t)使得整个闭环系统趋于有限时间稳定。
12、在本发明的一较佳实施方式中,步骤s1中,四旋翼无人机动力学模型为:
13、
14、其中,z、x和y分别代表四旋翼无人机在三维空间的z轴坐标、x轴坐标以及y轴坐标;和分别代表z轴方向的速度以及加速度;和分别代表x轴方向的速度以及加速度;和分别代表y轴方向的速度以及加速度;φ、θ和ψ分别代表四旋翼无人机的横滚角、俯仰角以及偏航角;和分别代表横滚角φ的角速度以及角加速度;和分别代表俯仰角θ的角速度以及角加速度;和分别代表偏航角ψ的角速度以及角加速度;uf、uφ、uθ和uψ分别代表四旋翼无人机的总升力、横滚角控制输入力矩、俯仰角控制输入力矩以及偏航角控制输入力矩;sin(·)和cos(·)分别表示正弦函数和余弦函数;m为四旋翼无人机的质量;g为重力加速度;l为四旋翼无人机质心与转子中心之间的距离;px、py和pz分别表示该方向上的旋转惯量;γq为阻力系数;dq为未知的外部扰动,且满足
15、在本发明的一较佳实施方式中,步骤s1中,状态空间方程表述为:
16、
17、其中,(ν1,ν2,ν3,ν4,ν5,ν6)=(φ,θ,ψ,z,x,y),ρ1=l/px,
18、ρ2=l/py,ρ3=l/pz,ρ4=ρ5=ρ6=1/m;τ1=uφ,τ2=uθ,
19、τ3=uψ,τ4=ufcosφcosθ-mg,τ5=uf(cosφsinθcosψ+sinφsinψ),τ6=uf(cosφsinθsinψ-sinφcosψ),d1=dφ,d3=dψ,d4=dz,d5=dx,d6=dy,为考虑的执行器故障模型;代表期望的控制输入;ai∈(0,1]代表执行器效率系数;bi代表执行器偏执故障。
20、在本发明的一较佳实施方式中,步骤s2具体包括:构造单调递减连续且可导的有限时间预设性能函数约束跟踪误差e1i(t),有限时间预设性能函数表示为
21、
22、其中,和分别是有限时间性能函数的初始值和稳态值,ti为待设计的收敛时间,构造等式关系和误差转换函数将受不等式约束的跟踪误差e1i(t)转换为不受约束的等效误差εi(t)。
23、在本发明的一较佳实施方式中,步骤s3中,坐标变换方程为
24、
25、其中,zi,1和zi,2代表误差变量,si,1=εi(t),ki,1和ki,2为误差补偿信号,αi,c为分数阶滤波器的输出信号,分数阶滤波器表示为
26、
27、其中,为待设计的控制参数,为分数算子,且满足αi,c(0)和αi(0)表示其初始值,αi为分数阶滤波器的输入信号。
28、在本发明的一较佳实施方式中,步骤s4中,针对四旋翼无人机姿态子系统和位置子系统的第一级子系统构造的李雅普诺夫函数vi,1为
29、
30、其中,λi,1为正常数,和为估计误差,和为参数φi,1和ψi,1的估计值。
31、在本发明的一较佳实施方式中,步骤s4中,虚拟控制函数αi、误差补偿信号κi,1、自适应律和自适应律设计公式如下:
32、
33、
34、
35、
36、
37、其中,δi,1,li,1,i,1,mi,1,λi,1,和为待设计的正控制器增益,κi,1(t)为待设计的时变函数,且β1和β2为正奇整数,为νid的时间导数。
38、在本发明的一较佳实施方式中,步骤s5中,针对四旋翼无人机姿态子系统和位置子系统的第二级子系统构造的李雅普诺夫函数vi为
39、
40、其中,和代表估计误差,且满足和为参数φi,2和ψi,2的估计值,λi,2为正常数。
41、在本发明的一较佳实施方式中,步骤s5中,自触发控制机制的触发规则表示为:
42、
43、
44、
45、
46、其中,ti,k,ti,k+1∈z+;ξi,li,2,li,2,ιi,mi,2,γi,1,γi,2和χi为待设计控制器增益,κi,2(t)为待设计的时变函数,为两次连续触发的时间间隔,ai为执行器效率系数,和χi表示控制信号间隔的变化率,为αi,c的时间导数。
47、在本发明的一较佳实施方式中,步骤s5中,误差补偿信号ki,2、自适应律以及自适应律的设计公式如下:
48、
49、
50、
51、其中,li,2,λi,2,和为待设计的控制器增益。
52、与现有技术相比,本发明的有益效果是:
53、1)区别于现有的渐进稳定控制器设计方法和传统的预设性能控制器设计方法,基于本发明设计方法设计的有限时间预设性能弹性轨迹跟踪控制器能保证整个四旋翼无人机姿态子系统和位置子系统的所有信号都是有限时间有界;跟踪误差在给定的有限时间内收敛至预设的稳态误差区间,且绝不会违反该区域的边界;有效改善四旋翼无人机系统的暂态性能和稳态性能;有限时间预设性能函数的参数可以任意设计,可满足不同情况下的性能需求。
54、2)通过设计误差补偿信号和自适应律,解决滤波器误差、未知的偏执故障和近似误差对四旋翼无人机跟踪性能造成的不利影响,并有效地提高四旋翼无人机对执行器故障的适应性;通过有限时间预设性能函数的收敛特性约束执行器发生故障时跟踪误差产生的瞬时波动;保证四旋翼无人机发生执行器故障的情况下,仍然迅速、精准地跟踪参考轨迹。
55、3)将自触发机制纳入到有限时间预设性能弹性轨迹跟踪控制器的设计中,使控制信号严格按照预先规划的触发条件间歇性更新,有效避免系统控制信号的持续更新,降低了控制信号的更新频率和执行器的磨损,保证控制信号间断性更新的情况下,四旋翼无人机仍然能够精确跟踪参考轨迹。
56、为使本发明的上述目的、特征和优点能更明显易懂,下文特举本发明实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!