路径规划方法、装置、计算机设备和存储介质与流程
本申请涉及人工智能,特别是涉及一种路径规划方法、装置、计算机设备和存储介质。
背景技术:
1、随着人工智能技术的发展,以及对于道路交通的安全管控日益严格,为了缓解不同地区的当地交通压力,出现了设置限行区域,并为不同限行区域设置相应限行时间的方式,以使得在规定限行时间内,减少限行区域的车辆,缓解交通拥堵,维护道路交通安全。
2、传统上,对于存在限行区域的情况下需要进行路径规划时,多采用尽可能避免进入限行区域的方式。其中,路径规划的基本思路在于计算从起点到终点之间经过各个路段的代价,确定出代价最小的最优路线,因此需要挖掘出限行区域内所有的路段,并针对所有路段均设置较大的通行代价,以实现在进行路径规划时,避开限行区域中通行代价大的所有路段。
3、然而,目前的规划方式,由于需要挖掘出限行区域内的所有路段,并进行通行代价设置,导致服务内存消耗巨大,资源浪费。同时,如果存在无法规避的情况,比如终点位于限行区域内部时,为了尽可能避开限行区域,会出现优先规避限行区域,直至无法规避时再进入限行区域的情况,容易出现局部绕路的问题,同时造成总的通行代价提升。因此,传统的规划方式,仍然存在服务内存消耗资源巨大,路线规划不合理的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够减少资源消耗,提升路径规划合理性的路径规划方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种路径规划方法。所述方法包括:
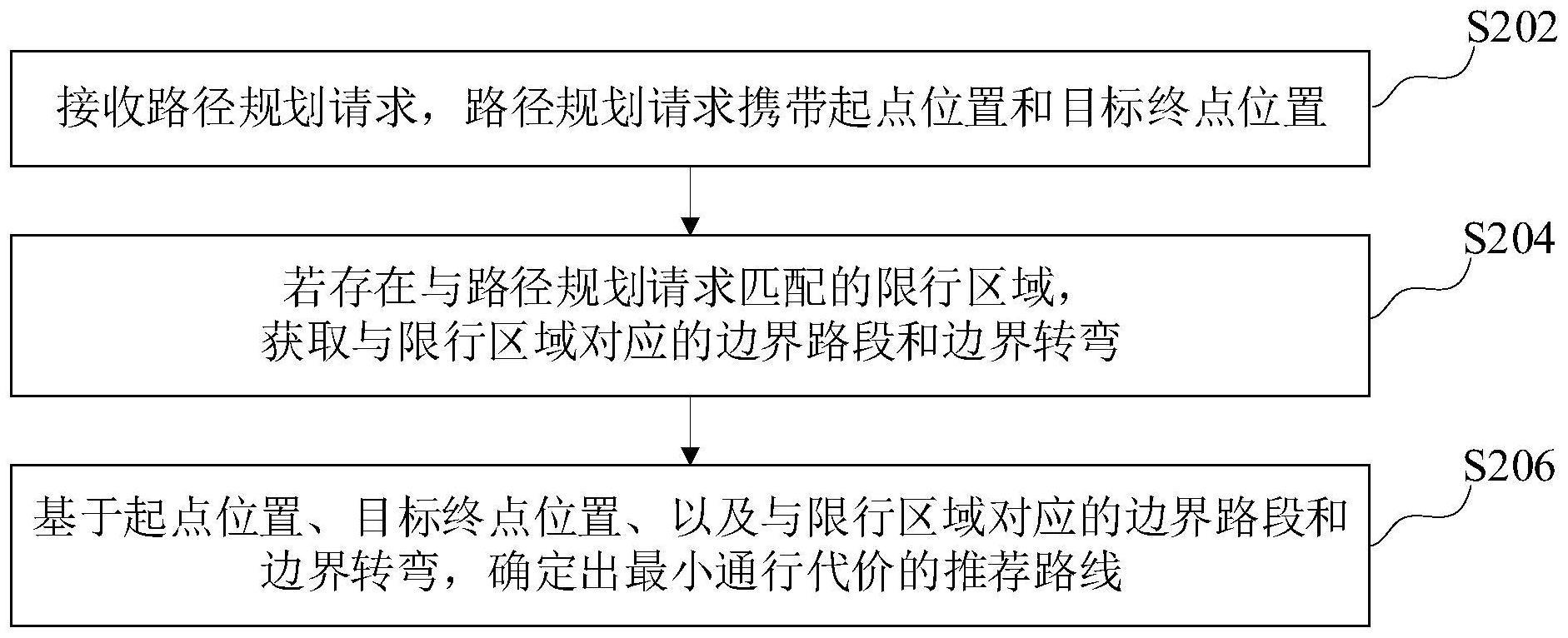
3、接收路径规划请求,所述路径规划请求携带起点位置和目标终点位置;
4、若存在与所述路径规划请求匹配的限行区域,获取与所述限行区域对应的边界路段和边界转弯;
5、基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。
6、在其中一个实施例中,所述基于各所述射线穿过所述区域面的边界的次数,确定所述射线对应的所述有效路段和所述区域面之间的位置关系,包括:
7、当所述射线穿过所述区域面的边界的次数为奇数时,确定所述有效路段和所述区域面之间的位置关系为第一位置关系;所述第一位置关系用于确定出边界路段;
8、当所述射线穿过所述区域面的边界的次数为偶数时,确定所述有效路段和所述区域面之间的位置关系为第二位置关系;所述第二位置关系用于确定出边界转弯。
9、在其中一个实施例中,筛选出与所述最小区域包围盒相交的最小路段包围盒,包括:
10、获取所述最小区域包围盒的第一边界顶点坐标值,以及各所述最小路段包围盒的第二边界顶点坐标值;
11、将各所述第二边界顶点坐标值,分别和所述第一边界顶点坐标值进行比对,确定出与所述最小区域包围盒相交的最小路段包围盒。
12、第二方面,本申请还提供了一种路径规划装置。所述装置包括:
13、路径规划请求接收模块,用于接收路径规划请求,所述路径规划请求携带起点位置和目标终点位置;
14、获取模块,用于若存在与所述路径规划请求匹配的限行区域,获取与所述限行区域对应的边界路段和边界转弯;
15、推荐路线确定模块,用于基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。
16、第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
17、接收路径规划请求,所述路径规划请求携带起点位置和目标终点位置;
18、若存在与所述路径规划请求匹配的限行区域,获取与所述限行区域对应的边界路段和边界转弯;
19、基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。
20、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
21、接收路径规划请求,所述路径规划请求携带起点位置和目标终点位置;
22、若存在与所述路径规划请求匹配的限行区域,获取与所述限行区域对应的边界路段和边界转弯;
23、基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。
24、第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
25、接收路径规划请求,所述路径规划请求携带起点位置和目标终点位置;
26、若存在与所述路径规划请求匹配的限行区域,获取与所述限行区域对应的边界路段和边界转弯;
27、基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。
28、上述路径规划方法、装置、计算机设备和存储介质中,通过接收路径规划请求,并获取路径规划请求携带的起点位置和目标终点位置。当存在与路径规划请求匹配的限行区域时,获取与限行区域对应的边界路段和边界转弯,进而基于起点位置、目标终点位置、以及与限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。该方法由于无需挖掘出限行区域内的所有路段和路段之间的转弯,可大幅度减少对服务资源的占用,而在存在限行区域时,仅针对所确定出位于限行区域边界的边界路段和边界转弯,进行路径规划,避免出现为了规避限行区域导致优先其他路段而出现局部绕路的问题,进一步提升了所确定出的推荐路线的合理性。
技术特征:
1.一种路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,确定出与所述限行区域对应的边界路段和边界转弯的方式,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述限行区域和路网数据中的各路段,确定出有效路段,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述根据所述有效路段和所述限行区域,确定出与所述限行区域对应的边界路段和边界转弯,包括:
5.根据权利要求4所述的方法,其特征在于,所述确定出各所述有效路段和所述限行区域的区域面的位置关系,包括:
6.根据权利要求4所述的方法,其特征在于,所述基于各所述有效路段和所述区域面之间的位置关系,从所述有效路段中筛选出边界路段,包括:
7.根据权利要求4所述的方法,其特征在于,所述基于各所述有效路段和所述区域面之间的位置关系,确定边界转弯,包括:
8.根据权利要求1至3任意一项所述的方法,其特征在于,所述基于所述起点位置、目标终点位置、以及与所述限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线,包括:
9.一种路径规划装置,其特征在于,所述装置包括:
10.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至8中任一项所述的方法的步骤。
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的方法的步骤。
技术总结
本申请涉及一种路径规划方法、装置、计算机设备和存储介质。所述方法应用于自动驾驶领域,包括:接收路径规划请求,路径规划请求携带起点位置和目标终点位置;若存在与路径规划请求匹配的限行区域,获取与限行区域对应的边界路段和边界转弯;基于起点位置、目标终点位置、以及与限行区域对应的边界路段和边界转弯,确定出最小通行代价的推荐路线。采用本方法无需挖掘出限行区域内的所有路段和路段之间的转弯,可减少对服务资源的占用,而存在限行区域时,仅针对所确定出位于限行区域边界的边界路段和边界转弯,进行路径规划,避免出现为了规避限行区域导致优先其他路段而出现局部绕路的问题,进一步提升了所确定出的推荐路线的合理性。
技术研发人员:郭宇峰,赵红超,李伟征,黄炜,吴雨佳
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!