机器人行走环境检测方法、行走控制方法、机器人及芯片与流程
本发明涉及机器人行走表面识别的,特别是在多种类型的行走环境下,结合超声波传感器和惯性传感器的的机器人行走环境检测方法、行走控制方法、机器人及芯片。
背景技术:
1、智能机器人在行走过程中难免遇到打滑、轮子空转等问题,目前一般会采用陀螺仪和加速度计推算航向角,使用码盘进行位移计算,通过航向角和位置得出机器人的位置。一般而言,所述智能机器人感知到行走环境发生变化,主要包括智能机器人在行走过程中检测到从地板进入地毯或者从地毯进入地板等行走环境发生变化,有时智能机器人的前方会存在高度较低的凸起;在这些变化的行走环境下,智能机器人的驱动轮会出现打滑或空转,与码盘实际测得的里程距离不一致,导致位移计算有偏差,这种偏差如果不及时修正就会导致地图建立有偏差。而且,现有技术会通过检测地面反馈的超声波信号的强弱来检测地面介质的类型,但不能区分出地面覆盖上地毯还是凸出较高的障碍物,因为机器人在跨越部分过高的障碍物时,检测到的超声波反射信号的强度范围与检测到地毯区域所对应的强度范围比较接近,由于信号强度都比较弱,不容易被区分出来。
技术实现思路
1、为了解决上述技术问题,本发明公开机器人行走环境检测方法、行走控制方法、机器人及芯片,让机器人及时避开地毯表面和过高的障碍物,减少机器人的打滑现象的发生,具体的技术方案如下:
2、机器人行走环境检测方法,其特征在于,机器人行走环境检测方法适用于装配惯性传感器和超声波传感器的机器人,其中,超声波传感器装配在机器人的底部的前方;机器人行走环境检测方法包括机器人结合超声波传感器接收到的超声波反射信号的强度和惯性传感器测得的角度信息,在超声波反射信号的一个信号强度范围内检测机器人前方的区域和跨越障碍物的状态。
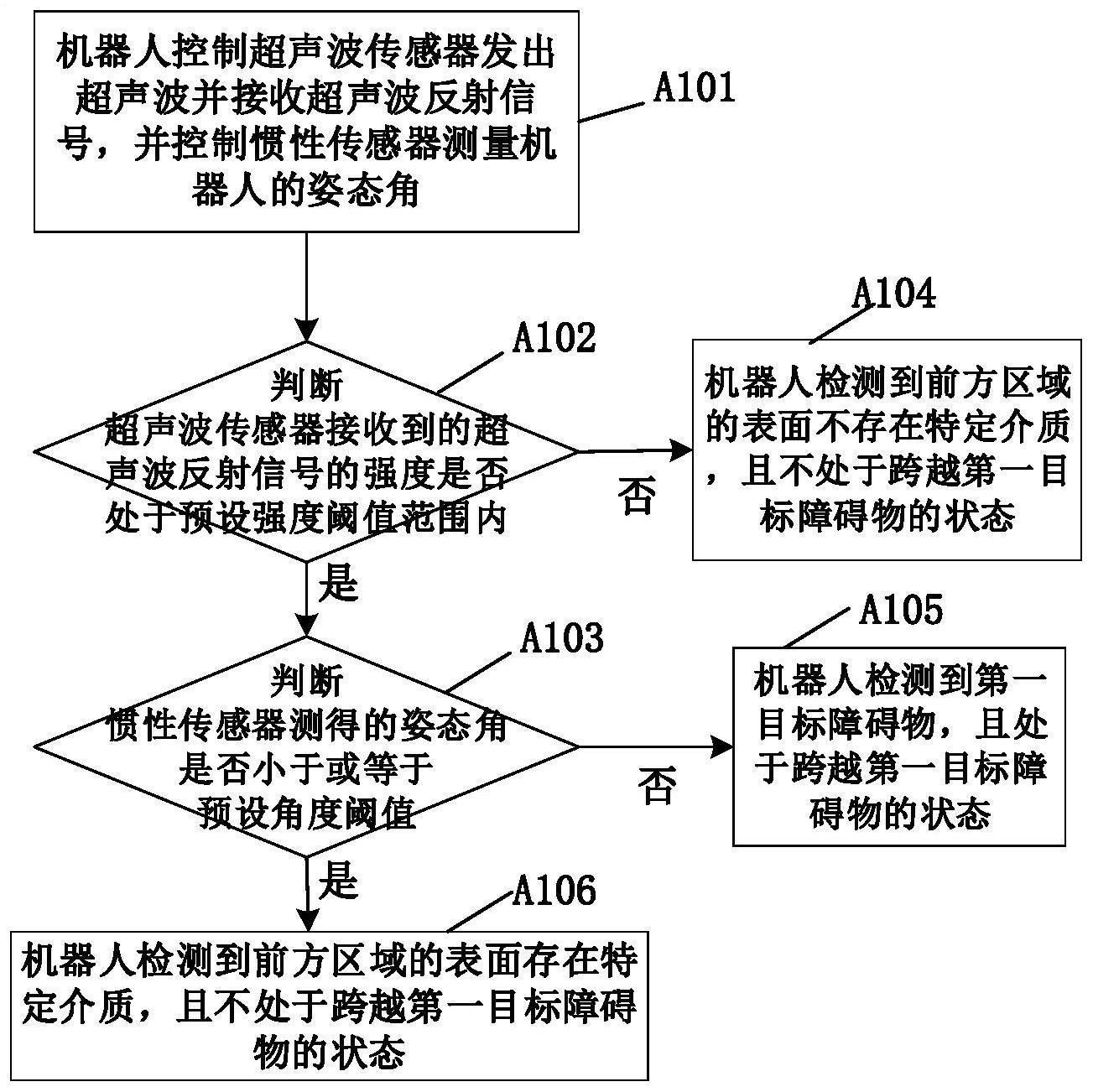
3、进一步地,所述机器人结合超声波传感器接收到的超声波反射信号的强度和惯性传感器测得的角度信息,在超声波反射信号的一个信号强度范围内检测机器人前方的区域和跨越障碍物的状态的具体方法包括机器人控制超声波传感器发出超声波并接收超声波反射信号,并控制惯性传感器测量机器人的姿态角;当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内时,机器人检测到前方区域的表面不存在特定介质,且不处于跨越第一目标障碍物的状态;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角处于第一预设角度阈值范围时,机器人检测到前方区域的表面存在特定介质,且不处于跨越第一目标障碍物的状态;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角处于第二预设角度阈值范围时,机器人检测到第一目标障碍物,且处于跨越第一目标障碍物的状态;其中,机器人处于跨越障碍物的状态是相对于水平平面,机器人的机体倾斜设置在障碍物的表面;障碍物包括第一目标障碍物;其中,第一预设角度阈值范围内的值小于第二预设角度阈值范围内的值;其中,第一目标障碍物是凸出于水平平面,且第一目标障碍物的高度是大于机器人跨越障碍物所允许的最大可跨越高度。
4、进一步地,当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人检测到前方区域的表面存在特定介质,且不处于跨越第一目标障碍物的状态;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角大于预设角度阈值时,机器人检测到第一目标障碍物,且处于跨越第一目标障碍物的状态;其中,小于或等于预设角度阈值的角度范围是第一预设角度阈值范围,大于预设角度阈值的角度范围是第二预设角度阈值范围。
5、进一步地,预设角度阈值是由机器人跨越障碍物所允许的最大可跨越高度的反三角函数结果决定;其中,预设角度阈值是配置为预先设定的误差数量级下的一个数值。
6、进一步地,当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人检测到第二目标障碍物并处于跨越第二目标障碍物的状态;或者,当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人不处于跨越障碍物的状态;其中,障碍物还包括第二目标障碍物;第二目标障碍物是凸出于水平平面,且第二目标障碍物的高度是小于或等于机器人跨越障碍物所允许的最大可跨越高度。
7、进一步地,所述惯性传感器包括六轴陀螺仪,惯性传感器测得的姿态角是俯仰角或翻滚角,以获得机器人在所述障碍物上的角度信息;其中,俯仰角用于表示机器人与障碍物的接触面与水平平面所成的夹角;其中,翻滚角用于表示机器人的轮轴线与水平平面所成的夹角;机器人的轮轴线是机器人的机体两侧的安装的驱动轮的轴线。
8、进一步地,所述特定介质是地毯;其中,超声波传感器接收到的超声波反射信号的强度是超声波在机器人行走环境的表面的反射信号,经过模数转换得到的电平数值;其中,机器人的行走环境包括表面覆盖所述特定介质的平面区域和所述障碍物的表面。
9、行走控制方法,行走控制方法适用于装配惯性传感器和超声波传感器的机器人,其中,超声波传感器装配在机器人的底部的前方;行走控制方法包括机器人结合超声波传感器接收到的超声波反射信号的强度和惯性传感器测得的角度信息,在超声波反射信号的一个信号强度范围内检测特定介质区域和第一目标障碍物,并在全局地图中标记出对应的栅格,同时检测到机器人在第一目标障碍物上的状态,然后调整行走策略,以使得机器人不进入特定介质区域。
10、进一步地,所述行走控制方法具体包括机器人控制超声波传感器发出超声波并接收超声波反射信号,并控制惯性传感器测量机器人的姿态角;当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内时,机器人没有检测到特定介质区域且不处于跨越第一目标障碍物的状态;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角处于第一预设角度阈值范围时,机器人检测到特定介质区域且不处于跨越障碍物的状态,并在全局地图中标记出该特定介质区域的边界点对应的栅格;然后调整行走方向,使得机器人不进入特定介质区域;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角处于第二预设角度阈值范围时,机器人检测到第一目标障碍物且处于跨越第一目标障碍物的状态,同时在全局地图中标记第一目标障碍物对应的栅格,然后机器人不继续跨越第一目标障碍物;其中,机器人处于跨越障碍物的状态是相对于水平平面,机器人的机体倾斜设置在障碍物的表面;障碍物包括第一目标障碍物;其中,所述全局地图是属于栅格地图,预存在机器人的存储器中;其中,第一预设角度阈值范围内的值小于第二预设角度阈值范围内的值。
11、进一步地,当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人检测到特定介质区域且不处于跨越障碍物的状态,并在全局地图中标记出该特定介质区域的边界点对应的栅格;然后调整行走方向,使得机器人不进入检测到的特定介质区域;其中,特定介质区域是属于平面区域;当超声波传感器接收到的超声波反射信号的强度处于预设强度阈值范围内,且惯性传感器测得的姿态角大于预设角度阈值时,机器人检测到第一目标障碍物且处于跨越第一目标障碍物的状态,再在全局地图中标记第一目标障碍物对应的栅格,然后机器人不继续跨越该第一目标障碍物;其中,第一目标障碍物是凸出于水平平面,且第一目标障碍物的高度是大于机器人跨越障碍物所允许的最大可跨越高度;其中,小于或等于预设角度阈值的角度范围是第一预设角度阈值范围,大于预设角度阈值的角度范围是第二预设角度阈值范围。
12、进一步地,预设角度阈值是由机器人跨越障碍物所允许的最大可跨越高度的反三角函数结果决定;其中,预设角度阈值是配置为预先设定的误差数量级下的一个数值。
13、进一步地,当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人检测到第二目标障碍物并处于跨越第二目标障碍物的状态,再在全局地图中标记第二目标障碍物对应的栅格,然后机器人继续前进以跨越该第二目标障碍物;或者,当超声波传感器接收到的超声波反射信号的强度没有处于预设强度阈值范围内,且惯性传感器测得的姿态角小于或等于预设角度阈值时,机器人不处于跨越障碍物的状态,机器人按照预设规划路径行走;其中,障碍物还包括第二目标障碍物;第二目标障碍物是凸出于水平平面,且第二目标障碍物的高度是小于或等于机器人跨越障碍物所允许的最大可跨越高度。
14、进一步地,还包括:每当机器人在全局地图中搜索邻域中除了已检测到的所述特定介质区域之外的未遍历位置点对应的栅格时,机器人先行走至该未遍历位置点,再从该未遍历位置点继续按照预设规划路径进行行走,但不进入特定介质区域;当机器人遍历完除特定介质区域之外的区域时,确定剩下的未遍历区域是所述特定介质区域,其中,所述特定介质区域是由所述边界点连接形成的一个或多个闭合区域组成,每个闭合区域的边界点都是所述特定介质区域的边界点;所述特定介质区域在全局地图中是表示为由所述边界点对应的栅格围成的一个或多个闭合的栅格区域组成;其中,每当机器人行走到一个位置点,则确定机器人遍历到该位置点,并将该位置点设置为已遍历的位置点,且在全局地图中将该位置点对应的栅格标记为已遍历的栅格。
15、进一步地,所述惯性传感器包括六轴陀螺仪,惯性传感器测得的姿态角是俯仰角或翻滚角,以获得机器人在所述障碍物上的角度信息;其中,俯仰角用于表示机器人与障碍物的接触面与水平平面所成的夹角;其中,翻滚角用于表示机器人的轮轴线与水平平面所成的夹角;机器人的轮轴线是机器人的机体两侧的安装的驱动轮的轴线。
16、进一步地,所述特定介质区域是地毯覆盖的区域;所述预设规划路径是弓字形路径;其中,超声波传感器接收到的超声波反射信号的强度是超声波在机器人行走环境的表面的反射信号,经过模数转换得到的电平数值;机器人的行走环境包括所述特定介质区域和所述障碍物的表面。
17、一种机器人,所述机器人装配惯性传感器、超声波传感器和处理器,其中,超声波传感器装配在机器人的底部的前方;所述处理器用于控制机器人执行所述机器人行走环境检测方法,或控制机器人执行所述行走控制方法。
18、一种芯片,所述芯片上存储有程序,所述程序被芯片执行时实现如所述机器人行走环境检测方法,或实现如所述机器人行走环境检测方法。
19、针对常规情况下机器人行走环境变化,如地毯等介质不同和跨过障碍物等导致的机器人轮子打滑进而影响位置推算的问题,本发明技术方案利用惯性传感器测得的俯仰角度或翻滚角度信息与机器人最大可跨越高度换算出相应角度值进行比较,排除掉超声波传感器反馈的信号强度较弱情况下形成的地毯区域检测误差,进而区别出障碍物和地毯区域,并作出适应的行走策略,让机器人及时规避打滑误识别的风险,从而在机器人建立的地图更加接近真实的环境地图,更有利于后面的路径规划。
- 还没有人留言评论。精彩留言会获得点赞!