主动扭转桨叶振动控制方法、系统、设备及介质
本发明涉及直升机结构设计,特别是涉及一种主动扭转桨叶振动控制方法、系统、设备及介质。
背景技术:
1、与固定翼飞机相比,直升机具有其得天独厚的优势:垂直起降、空中悬停、无需跑道、低空低速飞行等,在快速反应、对地攻击、短距运输、海上反潜等军用领域,和救援救灾、吊装、观光等民用领域都得到了广泛的应用。直升机振动严重影响乘员的舒适性、机载武器的命中精度、结构零件的疲劳寿命和可靠性,很大程度上阻碍了直升机的应用和发展。
2、桨叶驱动控制是通过在桨叶上布置驱动器,驱动桨叶发生扭转,进而改变非定常气动力分布,达到降低振动载荷的目的。主动扭转桨叶(active twist rotor,atr)的诞生得益于压电智能材料的发展,在桨叶上下表面蒙皮铺层中嵌入压电纤维复合材料,驱动桨叶整体发生扭转,并且通过剪裁设计寻求最大扭转驱动。由于桨叶外侧动压高,只需很小的扭转就可以改变桨叶气动载荷分布,从而达到减振的目的。
3、与常规桨叶相比,atr桨叶在蒙皮铺设或者嵌入了主动纤维复合材料(activefiber composite,afc)或粗纤维压电复合材料(macro fiber composite,mfc),压电材料不仅使驱动器驱动结构产生应变,引入了力电耦合的主动力,而且是桨叶承力的一部分,对桨叶的质量特性和刚度特性产生影响。
4、目前对主动扭转桨叶的研究还处在原理验证阶段,还未形成较系统的分析方法。国外采用的直升机综合分析平台如camerad ii等在进行主动扭转桨叶分析建模中仍存在很多局限性。因此,本领域亟需一种适用于主动扭转桨叶的振动控制方法。
技术实现思路
1、针对上述背景技术中提出的问题,本发明提供一种主动扭转桨叶振动控制方法、系统、设备及介质,以实现主动扭转桨叶振动的有效抑制。
2、为实现上述目的,本发明提供了如下方案:
3、一方面,本发明提供一种主动扭转桨叶振动控制方法,包括:
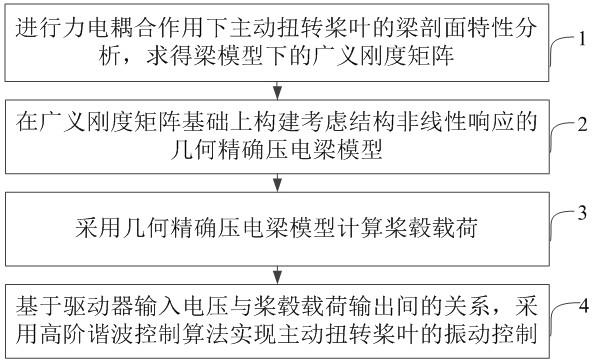
4、进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,求得梁模型下的广义刚度矩阵;
5、在广义刚度矩阵基础上构建考虑结构非线性响应的几何精确压电梁模型;所述几何精确压电梁模型包括梁结构的几何方程、本构方程、平衡方程和电路方程;
6、采用几何精确压电梁模型计算桨毂载荷;
7、基于驱动器输入电压与桨毂载荷输出间的关系,采用高阶谐波控制算法实现主动扭转桨叶的振动控制。
8、可选地,所述进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,求得梁模型下的广义刚度矩阵,具体包括:
9、进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,得到三维线性弹性体的本构关系;其中为应力张量;为电位移张量;为弹性系数张量;为压电系数张量;为介电常数张量;为线性小应变张量;为电场强度;运算符表示双点乘;表示压电系数张量的转置;
10、基于所述三维线性弹性体的本构关系推导出多物理场三维梁控制方程;其中向量和分别为剖面上网格节点的位移和电动势;分别表示沿轴向的一阶与二阶偏导;为相应的电场边界条件离散后的向量;为推导而得的三个系数矩阵;
11、将所述多物理场三维梁控制方程改写为非齐次一阶常微分方程;其中为节点状态变量;;为阶单位矩阵;所述非齐次一阶常微分方程的解由对应的齐次方程的通解和非齐次方程的特解组成;
12、根据所述非齐次一阶常微分方程的解求得梁模型下的广义刚度矩阵;其中为三维梁总装刚度矩阵;,为求解齐次方程的通解所构成的通解矩阵;为求解非齐次方程得到的特解所构成的特解矩阵;;为使得梁的广义力与截面内力形成能量共轭对的坐标变换矩阵;为单位矩阵。
13、可选地,所述在广义刚度矩阵基础上构建考虑结构非线性响应的几何精确压电梁模型,具体包括:
14、在广义刚度矩阵基础上构建梁结构的几何方程;其中为全局坐标系下广义线应变;为全局坐标系下弹性曲率;为剖面旋转张量;为参考轴线曲率;为剖面的转动角速度;表示对时间的导数;表示对弧长坐标的导数;表示物理量表述在材料坐标系下;表示转置;
15、在所述广义刚度矩阵与所述几何方程基础上构建梁结构的本构方程;其中,为截面上的合力;为截面上的合力矩;为单位长度上的电荷量;为广义刚度矩阵的分块矩阵;和分别为与线应变和曲率相关的力电耦合系数;为电容;为作用在电极对上的电势差;
16、基于所述本构方程推导出梁结构的平衡方程;其中为力臂;为位于全局坐标系下的内力和内力矩向量;为包含惯性力的外力和外力矩向量;
17、基于所述本构方程推导出梁结构的电路方程;其中为梁段上电荷量;为梁的展长;为外部负载电阻,为负载两端电压;为梁的单位长度。
18、可选地,所述基于驱动器输入电压与桨毂载荷输出间的关系,采用高阶谐波控制算法实现主动扭转桨叶的振动控制,具体包括:
19、通过递归最小二乘法得到t矩阵递归公式;
20、根据所述t矩阵递归公式建立驱动器输入电压与桨毂载荷输出间的关系;
21、根据所述驱动器输入电压与桨毂载荷输出间的关系计算最优控制电压;
22、根据所述最优控制电压计算每片桨叶上压电驱动器的控制电压;
23、根据所述控制电压驱动桨叶发生扭转,改变非定常气动力分布,实现对主动扭转桨叶的振动抑制。
24、另一方面,本发明提供一种主动扭转桨叶振动控制系统,包括:
25、梁剖面特性分析模块,用于进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,求得梁模型下的广义刚度矩阵;
26、几何精确压电梁模型构建模块,用于在广义刚度矩阵基础上构建考虑结构非线性响应的几何精确压电梁模型;所述几何精确压电梁模型包括梁结构的几何方程、本构方程、平衡方程和电路方程;
27、桨毂载荷计算模块,用于采用几何精确压电梁模型计算桨毂载荷;
28、桨叶振动控制模块,用于基于驱动器输入电压与桨毂载荷输出间的关系,采用高阶谐波控制算法实现主动扭转桨叶的振动控制。
29、可选地,所述梁剖面特性分析模块具体包括:
30、本构关系确定单元,用于进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,得到三维线性弹性体的本构关系;其中为应力张量;为电位移张量;为弹性系数张量;为压电系数张量;为介电常数张量;为线性小应变张量;为电场强度;运算符表示双点乘;表示压电系数张量的转置;
31、多物理场三维梁控制方程推导单元,用于基于所述三维线性弹性体的本构关系推导出多物理场三维梁控制方程;其中向量和分别为剖面上网格节点的位移和电动势;分别表示沿轴向的一阶与二阶偏导;为相应的电场边界条件离散后的向量;为推导而得的三个系数矩阵;
32、非齐次一阶常微分方程改写单元,用于将所述多物理场三维梁控制方程改写为非齐次一阶常微分方程;其中为节点状态变量;;为阶单位矩阵;所述非齐次一阶常微分方程的解由对应的齐次方程的通解和非齐次方程的特解组成;
33、广义刚度矩阵求解单元,用于根据所述非齐次一阶常微分方程的解求得梁模型下的广义刚度矩阵;其中为三维梁总装刚度矩阵;,为求解齐次方程的通解所构成的通解矩阵;为求解非齐次方程得到的特解所构成的特解矩阵;;为使得梁的广义力与截面内力形成能量共轭对的坐标变换矩阵;为单位矩阵。
34、另一方面,本发明还提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的主动扭转桨叶振动控制方法。
35、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现所述的主动扭转桨叶振动控制方法。
36、根据本发明提供的具体实施例,本发明公开了以下技术效果:
37、本发明所提供的主动扭转桨叶振动控制方法、系统、设备及介质,通过进行力电耦合作用下主动扭转桨叶的梁剖面特性分析,求得梁模型下的广义刚度矩阵;在广义刚度矩阵基础上构建考虑结构非线性响应的几何精确压电梁模型;所述几何精确压电梁模型包括梁结构的几何方程、本构方程、平衡方程和电路方程;采用几何精确压电梁模型计算桨毂载荷;基于驱动器输入电压与桨毂载荷输出间的关系,采用高阶谐波控制算法实现主动扭转桨叶振动的有效控制。
- 还没有人留言评论。精彩留言会获得点赞!