一种星载GNSS接收机抗空间单粒子翻转加固系统及方法
本发明属于航天器空间复杂环境下的可靠性结构设计,具体涉及一种星载gnss接收机抗空间单粒子翻转加固系统及方法。
背景技术:
1、星载gnss接收机,是一种将多种卫星导航信号集成应用的星上接收设备,星载gnss接收机工作在太空环境中,一直处于宇宙空间带电粒子的辐射环境下。因此,当发生单粒子翻转时,通常会引起星载gnss接收机的某些功能异常,进而影响航天任务,具有可靠性不高的问题。
技术实现思路
1、针对现有技术存在的缺陷,本发明提供一种星载gnss接收机抗空间单粒子翻转加固系统及方法,可有效解决上述问题。
2、本发明采用的技术方案如下:
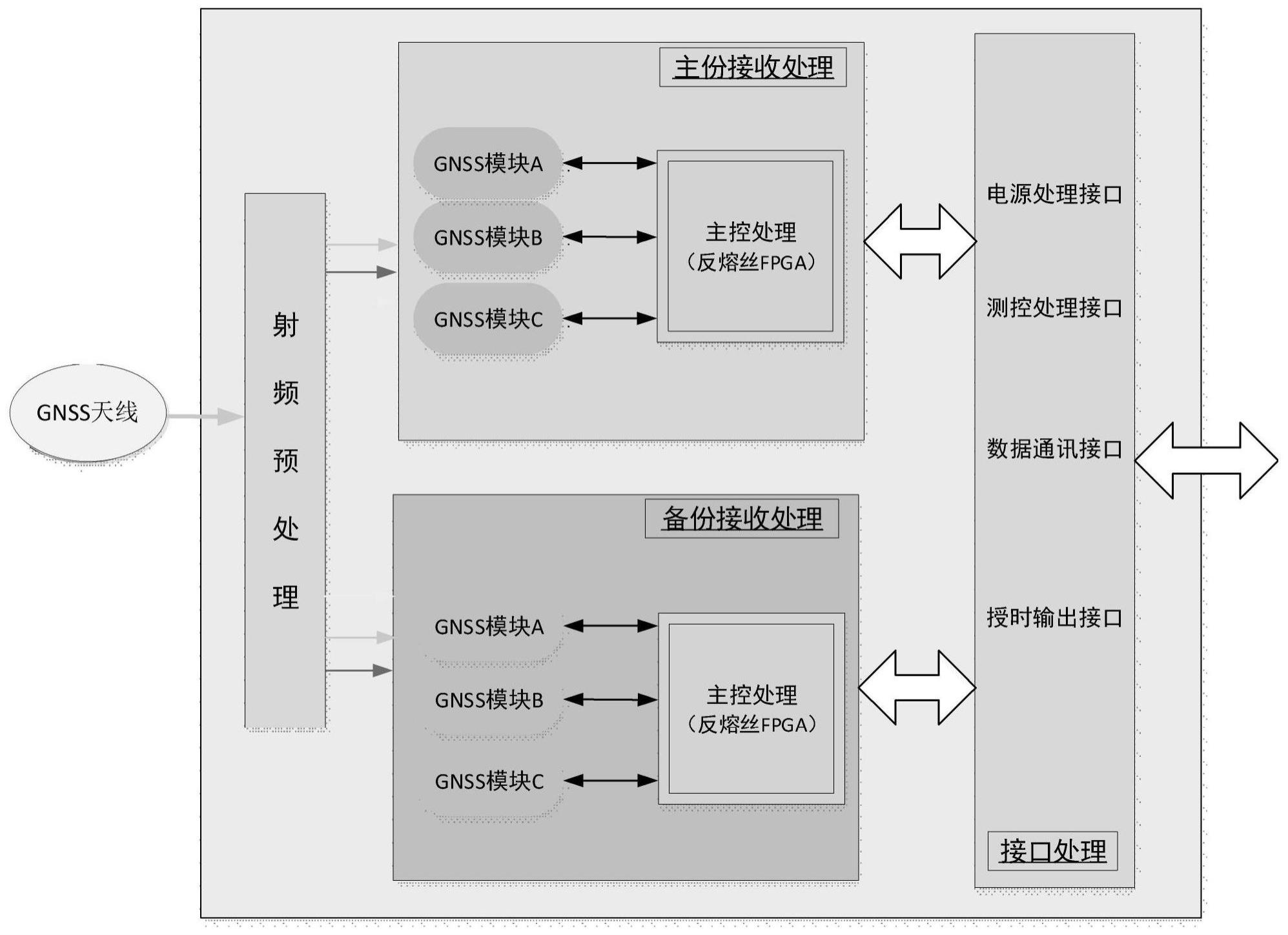
3、本发明提供一种星载gnss接收机抗空间单粒子翻转加固系统,所述星载gnss接收机抗空间单粒子翻转加固系统安装于gnss天线和接口处理单元之间,包括主份接收机处理单元和备份接收机处理单元;
4、所述主份接收机处理单元和所述备份接收机处理单元的结构相同,均包括:电源处理器、第1gnss模块通道、第2gnss模块通道、第3gnss模块通道和主控处理器;
5、所述电源处理器和所述主控处理器之间,并联安装所述第1gnss模块通道、所述第2gnss模块通道和所述第3gnss模块通道;
6、其中:
7、所述第1gnss模块通道包括第0电子开关、第1电子开关和第1gnss模块;其中,所述第0电子开关和所述第1电子开关并联后,与所述第1gnss模块串联;
8、所述第2gnss模块通道包括第2电子开关、第3电子开关和第2gnss模块;其中,所述第2电子开关和所述第3电子开关并联后,与所述第2gnss模块串联;
9、所述第3gnss模块通道包括第4电子开关、第5电子开关和第3gnss模块;其中,所述第4电子开关和所述第5电子开关并联后,与所述第3gnss模块串联。
10、优选的,所述主控处理器采用反熔丝fpga。
11、本发明还提供一种星载gnss接收机抗空间单粒子翻转加固系统的方法,包括以下步骤:
12、步骤1,主份接收机处理单元和备份接收机处理单元采用主备工作模式,具体的,正常情况下,主份接收机处理单元为工作状态,备份接收机处理单元为不工作状态,由主份接收机处理单元进行定位信息的接收工作;当主份接收机处理单元出现故障时,由自动将备份接收机处理单元切换为工作状态,由备份接收机处理单元进行定位信息的接收工作;
13、主份接收机处理单元和备份接收机处理单元的工作过程相同;均执行步骤2;
14、步骤2,主控处理器根据来自于地面的控制指令调整工作模式,当能源紧张时,控制系统进入单模块工作模式,即:仅一个gnss模块为工作模式,其他两个gnss模块进入冷备状态;当出现单粒子现象引起工作模式下的gnss模块异常时,主控处理器将该gnss模块关闭,开启另外一个gnss模块进入工作状态,实现自主故障检测,保证系统的可用性;
15、当能源充足时,控制系统进入三模块工作模式,即:三个gnss模块均为工作模式,当其中一个gnss模块出现单粒子现象时,主控处理器根据三个gnss模块同时发送的定位信息进行裁决,选择出状态好的gnss模块的定位信息输送出去,保证系统不间断的输出完好、正确的定位信息;
16、三模块工作模式具体方式如下:
17、步骤2.1,主控处理器和三个gnss模块采用主从工作模式,即:主控处理器为主节点,第1gnss模块、第2gnss模块和第3gnss模块均为从节点;
18、第1gnss模块、第2gnss模块和第3gnss模块,均配置有寄存器,通过所述寄存器,实时获取对应gnss模块的状态参数gnss_state,包括:定位数据、工作状态nstate、秒计数wsec、定位精度因子gdop、定位钟差dt、定位钟漂df和指令cmdlist;其中,所述工作状态nstate包括定位状态和未定位状态;
19、步骤2.2,所述主控处理器预设定状态监控处理时刻为:以接收到当班gnss模块的pps后500ms为基准,每秒执行1次状态监控处理过程;
20、步骤2.3,所述主控处理器判断是否达到设定的状态监控处理时刻,如果没有达到,则持续等待,直到达到设定的状态监控处理时刻,然后执行步骤2.4;如果达到,则执行步骤2.4;
21、步骤2.4,所述主控处理器执行状态监控处理过程,包括:
22、步骤2.4.1,所述主控处理器通过spi,分别读取第1gnss模块、第2gnss模块和第3gnss模块的状态参数;
23、步骤2.4.2,根据指令cmdlist,执行对相关gnss模块的相关指令;
24、步骤2.4.3,根据每个gnss模块的状态参数,生成主控状态表,所述主控状态表包括:
25、1)记录每个gnss模块的开关状态,即:如果gnss模块能够采集到定位数据,并且,秒计数wsec递加1,则记录其开关状态mstate为1;否则,记录其开关状态mstate为0;
26、2)判定当班gnss模块:
27、如果记录的三个gnss模块的开关状态mstate均为0,则表明系统无当班gnss模块,退出判定当班gnss模块的流程;
28、如果读取到的三个gnss模块的工作状态nstate均为未定位状态,则:如果上次的当班gnss模块的开关状态mstate为1,则本次的当班gnss模块保持不变;否则,如果上次的当班gnss模块的开关状态mstate为0,则任意指定开关状态mstate为1的gnss模块作为本次的当班gnss模块,退出判定当班gnss模块的流程;
29、如果读取到的三个gnss模块的工作状态nstate中,只有1个gnss模块的工作状态nstate为定位状态,则:如果该gnss模块为上次的当班gnss模块,则本次的当班gnss模块保持不变;否则,指定该gnss模块为本次的当班gnss模块,退出判定当班gnss模块的流程;
30、如果读取到的三个gnss模块的工作状态nstate中,有且仅有2个gnss模块的工作状态nstate为定位状态,则在该2个gnss模块中,如果其定位精度因子gdop相差5以上,则选取定位精度因子gdop较小的gnss模块,作为候选当班gnss模块;否则,任意选1个gnss模块为候选当班gnss模块;若候选当班gnss模块为上次的当班gnss模块,则本次的当班gnss模块保持不变;否则,指定候选当班gnss模块为本次的当班gnss模块,退出判定当班gnss模块的流程;
31、如果读取到的三个gnss模块的工作状态nstate中,3个gnss模块的工作状态nstate均为定位状态,则执行3取2操作决定候选当班gnss模块,即:如果读取的秒计数wsec字段在计数,定位钟差dt为0且定位钟漂df为0,则将该gnss模块作为候选当班gnss模块,否则,该gnss模块不作为候选当班gnss模块;对于得到的候选当班gnss模块,如果为两个以上,则进一步判断其定位精度因子gdop的差值是否大于5,如果是,则取定位精度因子gdop值较小的gnss模块,作为候选当班gnss模块;否则,任意选1个gnss模块为候选当班gnss模块;退出判定当班gnss模块的流程;
32、3)配置反映当班gnss模块选定状态的pwm遥测输出电压:如果本次确认的当班gnss模块和上次的当班gnss模块有变化,则配置反映当班gnss模块选定状态的pwm遥测输出电压,同时将本次确认的当班gnss模块输入的io选通为向接口处理单元的输出;
33、4)从非当班gnss模块读入的状态参数gnss_state;
34、步骤2.4.4,所述主控处理器,通过spi向每个gnss模块发送所述主控状态表。
35、本发明提供的一种星载gnss接收机抗空间单粒子翻转加固系统及方法具有以下优点:
36、本发明利用低成本工业级器件结合软硬件冗余备份+高可靠反熔丝器件控制选通输出的系统实现方案,当发生单粒子翻转时仍能通过冗余信息及控制措施保障系统的可用性,提高系统的可靠性和星载接收机的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!