一种无人机舵机正向加载及反向力矩组合测试装置及方法与流程
本发明涉及电动舵机测试,具体为一种无人机舵机正向加载及反向力矩组合测试装置及方法。
背景技术:
1、在无人机电动舵机力矩测试过程中,通常使用扭杆、磁粉离合器等作为模拟负载,模拟电动舵机实际使用过程中,驱动舵翼时所承受的风载转化力矩。测试时常常将电动舵机的输出轴通过转接轴将其与扭杆固连,扭杆是一种材料为高强度合金弹簧钢,截面为矩形的长杆状零件,通过扭杆自身的扭转刚度和转动角度,可得到电动舵机所承受的模拟负载大小,扭杆需测试前进行标定,使用过程中无法实时捕捉力矩大小。角度指示通常使用指针、编码器等,在使用过程中难以通用。
2、现阶段,无人机舵机要求在断电等极端情况下,依然保持“跟随”特性。在原有电动舵机正向加载测试基础上,还需对电动舵机反向力矩进行测试,使得电动舵机的反向驱动最大静载荷小于电动舵机在风载转化力矩下的“跟随”力矩阀值。
3、另一方面,电动舵机在加载测试时,模拟负载力矩方向始终与电动舵机旋转方向相反,而在电动舵机实际工作时,风载转化力矩方向与电动舵机旋转方向可能相同,也可能相反。在测试阶段无法完全覆盖同向和反向的电动舵机性能。
技术实现思路
1、本发明目的在于提供一种计算当前档位的方法,以克服现有技术在测试阶段无法完全覆盖同向和反向的电动舵机性能的问题。
2、为实现上述目的,本发明提供如下技术方案:
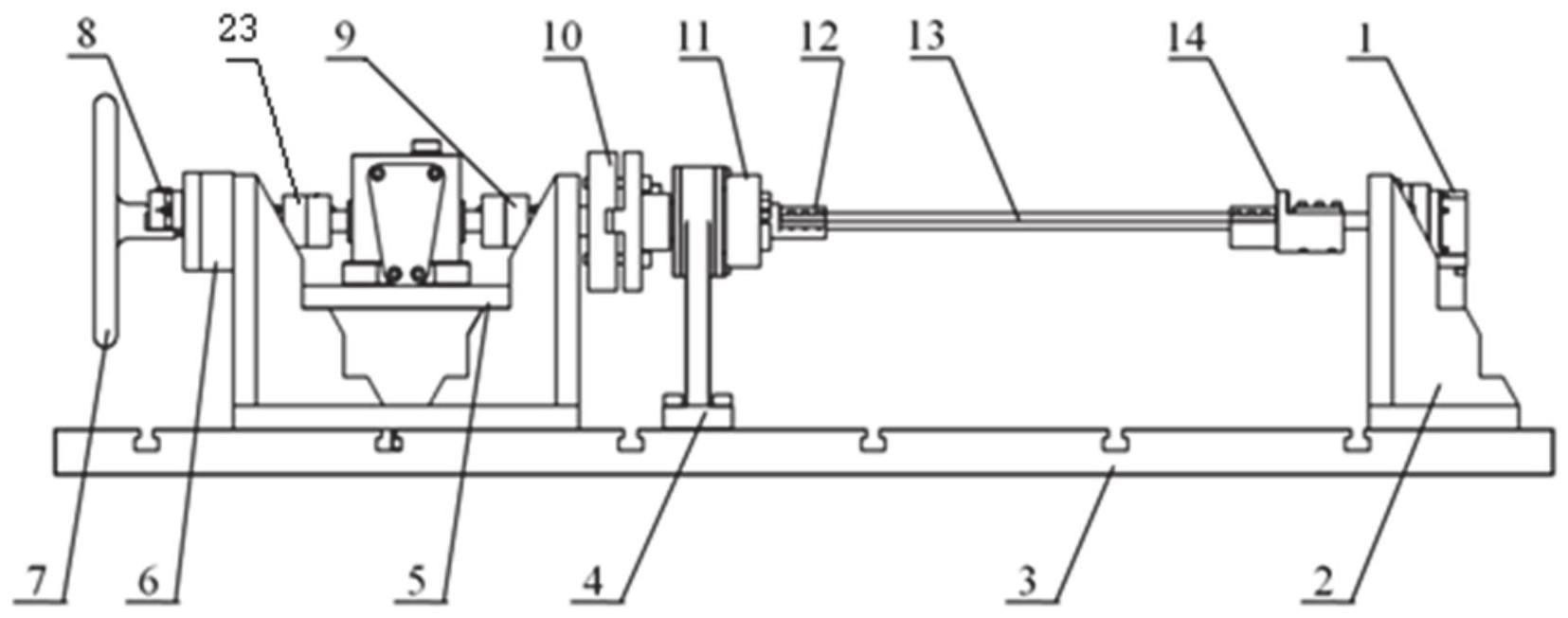
3、一种无人机舵机正向加载及反向力矩组合测试装置,包括安装支架,所述安装支架一侧连接待测电动舵机,所述安装支架另一侧依次连接有扭杆、角编码器、第一联轴器、第二联轴器、扭矩传感器、第三联轴器、行星齿轮减速机构、锁定块和手摇杆机构,所述安装支架固定在固定台上,所述角编码器通过第一支架固定在固定台上,所述扭矩传感器通过第二支架固定在固定台上。
4、优选地,扭杆两端设置有第一活动转接轴和第二活动转接轴,所述第一活动转接轴与安装支架连接,所述第二活动转接轴与第一联轴器连接。
5、优选地,第一活动转接轴和第二活动转接轴均为阶梯轴。
6、优选地,行星齿轮减速机构包括依次连接的第一行星支架、行星轮、第二行星支架和输出中心轮,所述第一行星支架与第三联轴器连接,所述输出中心轮与锁定块连接。
7、优选地,行星轮为两端带阶梯轴的直齿轮。
8、优选地,输出中心轮为一端带阶梯轴的直齿轮,阶梯轴一侧端面带有平扁的孔槽,阶梯轴外圆径向设有m3贯穿孔。
9、优选地,第一行星支架和第二行星支架均为圆盘结构。
10、优选地,锁定块为带两侧耳片的门字型矩形块,每个耳片上下各设有螺纹孔,中间为光孔,两侧耳片对称分布。
11、优选地,手摇杆机构主体为圆盘式转轮,转轮一侧设置有圆轴,圆轴末端平扁且上下对称。
12、一种无人机舵机正向加载及反向力矩组合测试方法,包括三种测试模式:
13、第一种为常规正向加载测试模式,将所有联轴器联通,将锁定块处于锁紧状态,通过角编码器与力矩传感器读取角度与力矩数值;
14、第二种为反向力矩测试模式,将所有联轴器联通,将锁紧块处于松弛状态,转动手摇杆机构,当角编码器开始显示数值时,力矩传感器变化过程中的最大值即为反向驱动最大静载荷;
15、第三种模式为同向载荷加载模式,将所有联轴器联通,将锁紧块处于松弛状态,转动手摇杆机构,转动方向与电动舵机转动方向相同,使力矩传感器数值保持在0至额定力矩范围内,获取当前工况下的电动舵机性能。
16、与现有技术相比,本发明具有以下有益效果:本发明提供了一种无人机舵机正向加载及反向力矩组合测试装置,针对无人机电动舵机正向加载及反向力矩组合测试问题,通过锁紧块、行星齿轮减速机构和手摇杆机构联动设计,同时兼容了电动舵机性能正反向两种功能的测试,弥补了反向力矩测试市场无成熟产品的应用空白,保证电动舵机在断电等极端情况下,通过手摇杆机构依然保持“跟随”特性,同时满足电动舵机在任意偏置角度任意附加载荷情况下实施扫频的需求,本发明将行星齿轮减速机构+手摇杆机构组合装置的结构形式用于扭杆力矩校核,以及电动舵机反向力矩测试领域,操作简便,精确可靠。
17、本发明还提供了一种无人机舵机正向加载及反向力矩组合测试方法,通过调整锁紧块和手摇杆机构,提供了三种测试模式,实现了正向加载和反向力矩的组合测试,提高了测试效率。
技术特征:
1.一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,包括安装支架(2),所述安装支架(2)一侧连接待测电动舵机(1),所述安装支架(2)另一侧依次连接有扭杆(13)、角编码器(11)、第一联轴器(10)、第二联轴器(9)、扭矩传感器(16)、第三联轴器(23)、行星齿轮减速机构(6)、锁定块(8)和手摇杆机构(7),所述安装支架(2)固定在固定台(3)上,所述角编码器(11)通过第一支架(4)固定在固定台(3)上,所述扭矩传感器(16)通过第二支架(5)固定在固定台(3)上。
2.根据权利要求1所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述扭杆(13)两端设置有第一活动转接轴(14)和第二活动转接轴(12),所述第一活动转接轴(14)与安装支架(2)连接,所述第二活动转接轴(12)与第一联轴器(10)连接。
3.根据权利要求2所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述第一活动转接轴(14)和第二活动转接轴(12)均为阶梯轴。
4.根据权利要求1所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,行星齿轮减速机构(6)包括依次连接的第一行星支架(19)、行星轮(21)、第二行星支架(20)和输出中心轮(22),所述第一行星支架(19)与第三联轴器(23)连接,所述输出中心轮(22)与锁定块(8)连接。
5.根据权利要求4所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述行星轮(21)为两端带阶梯轴的直齿轮。
6.根据权利要求4所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述输出中心轮为一端带阶梯轴的直齿轮,阶梯轴一侧端面带有平扁的孔槽,阶梯轴外圆径向设有m3贯穿孔。
7.根据权利要求4所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述第一行星支架(19)和第二行星支架(20)均为圆盘结构。
8.根据权利要求1所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述锁定块(8)为带两侧耳片的门字型矩形块,每个耳片上下各设有螺纹孔,中间为光孔,两侧耳片对称分布。
9.根据权利要求1所述的一种无人机舵机正向加载及反向力矩组合测试装置,其特征在于,所述手摇杆机构(7)主体为圆盘式转轮,转轮一侧设置有圆轴,圆轴末端平扁且上下对称。
10.一种无人机舵机正向加载及反向力矩组合测试方法,其特征在于,包括三种测试模式:
技术总结
本发明公开了一种无人机舵机正向加载及反向力矩组合测试装置及方法,针对无人机电动舵机正向加载及反向力矩组合测试问题,通过锁紧块、行星齿轮减速机构和手摇杆机构联动设计,同时兼容了电动舵机性能正反向两种功能的测试,弥补了反向力矩测试市场无成熟产品的应用空白,保证电动舵机在断电等极端情况下,通过手摇杆机构依然保持“跟随”特性,同时满足电动舵机在任意偏置角度任意附加载荷情况下实施扫频的需求,本发明将行星齿轮减速机构+手摇杆机构组合装置的结构形式用于扭杆力矩校核,以及电动舵机反向力矩测试领域,操作简便,精确可靠。
技术研发人员:左君龙,代永波
受保护的技术使用者:西安微电子技术研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!