卫星调轨时定轨滤波器自主初始化方法、系统、介质及设备与流程
本发明涉及卫星轨道,具体地,涉及一种卫星调轨时定轨滤波器自主初始化方法、系统、介质及设备。
背景技术:
1、卫星轨道摄动的力学因素包括:地球引力场的不均匀性、地球大气层阻力、天体引力、太阳光压、地磁场等,因此卫星的轨道需要定期调整。以某型号400km轨道卫星为例,半长轴每天衰减约600m,每天需进行2次自主轨控,每2周地面发令调整1次轨道。随着电推力器技术发展,卫星广泛采用自主调轨技术,以减少地面发令干预的频率。
2、星载导航接收机可实时解算定位数据和定轨数据,用于代替地面测控系统测定轨和轨道上注。为提高定轨定位精度,定轨滤波器普遍采用卡尔曼滤波器的设计方案,适用于正常轨道运行时的定轨定位数据处理。由于定轨滤波器精度和收敛时间相互矛盾,滤波后的定位定轨数据无法及时反应推力器点火时轨道的变化,导致输出的定位定轨数据无法满足载荷对位置精度的要求。
3、基于上述技术现状,在卫星调轨时需要对定轨滤波器进行初始化,清除累积的先验参数,实现定轨滤波器重新快速收敛的功能,以保证导航接收机输出定位定轨数据的精度。目前,定轨滤波器初始化主要包括两种方法:接收调轨遥测自主初始化、接收地面指令被动初始化,两种方法均需要提供外界输入参数。
4、专利文献cn101435863a公开了一种导航卫星实时精密定轨的方法,将卫星轨道按观测时间分割成连续等时长的短弧段,按照短弧段进行滑动处理,建立该弧段上卫星初始状态、力学模型参数等短弧段观测方程,提高定轨的精度。而本发明未对卫星调轨时的定轨精度分析,与型号实际应用存在差别。
5、专利文献cn102305630a公开了基于扩展卡尔曼滤波的sar卫星自主定轨方法,建立基于轨道动力学的卫星运动方程,建立以sar到地面标识点之间的距离和sar与地面标识之间的多普勒频移为观测量的观测方程,建立扩展卡尔曼滤波的递推方程,得到卫星的状态信息。而本发明用于实现卫星自主定轨,未设计卫星调轨时的定轨精度分析。
6、专利文献cn10200221a公开了一种利用定轨数据标定加速度计的方法,利用定轨数据标定加速度计,对轨控过程中脉冲当量进行修正,保证控制精度。而本发明利用加速度差对定轨滤波器进行初始化操作,实现导航接收机定轨滤波器的重新收敛,快速输出高精度的定位定轨数据。
7、专利文献cn103424116a公开了一种适应轨道机动的地球同步卫星精密定轨方法,计算机动加速度、观测量及观测残差序列,得到地面测控站系统偏差,扣除系统差后使用观测数据重新进行轨道改进。而本发明未使用地面测站数据,由导航接收机全自主对卫星进行测定轨,同时在卫星调轨后及时修正导航接收机滤波器误差,能够快速输出高精度的定位定轨数据。
8、专利文献cn1959430a公开了一种中低轨卫星的精密定位系统及其实现方法,利用galileo定位系统、卫星激光测距技术和卫星通信技术组合的精密定轨新方法,未涉及卫星调轨后的定轨方法。而本发明主要用于减小卫星调轨后的定轨误差和滤波收敛时间,以保证定位定轨数据输出的时效性。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种卫星调轨时定轨滤波器自主初始化方法、系统、介质及设备。
2、根据本发明提供的卫星调轨时定轨滤波器自主初始化方法,包括:
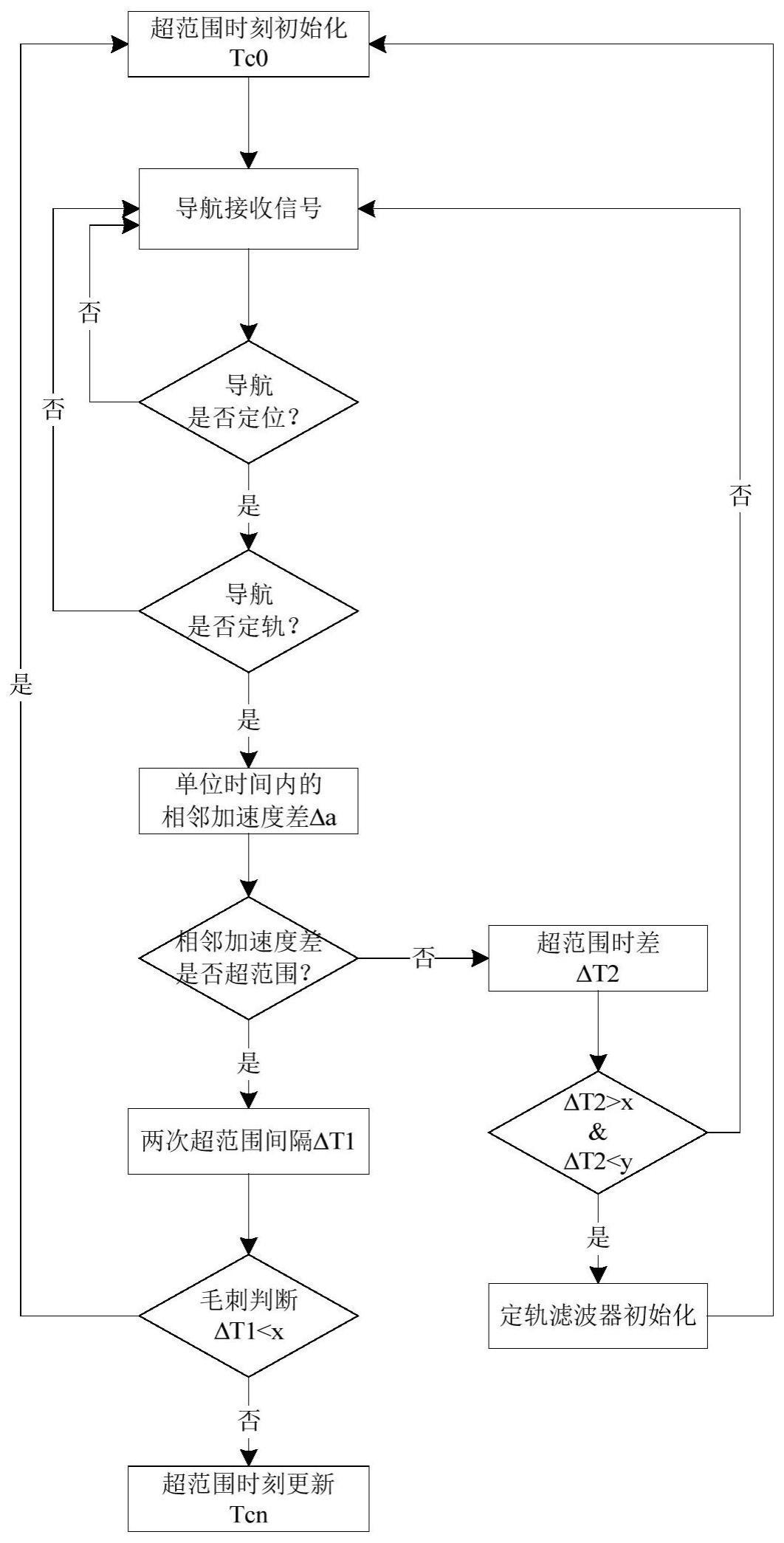
3、步骤1:进行单位时间内的相邻加速度差超范围事件识别;
4、步骤1.1:持续对导航接收机定位定轨后的相邻单点定位加速度做差,并除以相邻时间间隔,实时得到单位时间内的相邻加速度差;
5、步骤1.2:设定单位时间内的相邻加速度差的超范围门限;
6、步骤1.3:实时判断定位定轨条件下单位时间内的单点定位相邻加速度差是否大于超范围门限;
7、步骤1.4:单位时间内的相邻加速度差大于超范围门限时进行毛刺识别与处置,相邻加速度差不大于超范围门限时进行推力器点火或推力器熄火事件识别;
8、步骤2:进行超范围事件的毛刺识别与处置;
9、步骤2.1:设定单位时间内的相邻加速度差大于超范围门限时的滤波门限;
10、步骤2.2:两次单位时间内的相邻加速度差超范围事件的时差小于滤波门限被判定为毛刺;
11、步骤2.3:单位时间内的相邻单位时间内加速度差超范围事件为毛刺时,对单位时间内加速度差超范围时刻进行初始化,将单位时间内加速度差超范围时刻设为固定参考值;
12、步骤2.4:单位时间内的相邻加速度差为非毛刺跳变时,对加速度差超范围时刻进行更新;
13、步骤3:进行推力器点火或推力器熄火事件识别与处置;
14、步骤3.1:在单位时间内相邻加速度差不大于超范围门限时,对当前时刻与超差时刻做差得到超范围持续时间;
15、步骤3.2:设定超范围持续时间相对应的时差门限;
16、步骤3.3:在单位时间内相邻加速度差出现1次跳变时,后续加速度差保持跳变后的稳定变化状态,持续时间处于时差门限范围内识别卫星为调轨时的推力器点火事件或推力器熄火事件,并自主对定轨滤波器进行初始化操作,同时自主对单位时间内加速度差超范围时刻进行初始化。
17、优选的,所述步骤1.3中,以卫星最小推力器点火时单位时间内的加速度差值作为超范围门限。
18、优选的,所述步骤2.1中,以卫星推力器最短点火时长的1/2作为毛刺事件的滤波门限。
19、优选的,所述步骤3.2中,以卫星推力器最短点火时长的1/2作为时差门限的下限,以卫星发射时间与固定参考值的差值作为时差门限的上限。
20、根据本发明提供的卫星调轨时定轨滤波器自主初始化系统,包括:
21、模块m1:进行单位时间内的相邻加速度差超范围事件识别;
22、模块m1.1:持续对导航接收机定位定轨后的相邻单点定位加速度做差,并除以相邻时间间隔,实时得到单位时间内的相邻加速度差;
23、模块m1.2:设定单位时间内的相邻加速度差的超范围门限;
24、模块m1.3:实时判断定位定轨条件下单位时间内的单点定位相邻加速度差是否大于超范围门限;
25、模块m1.4:单位时间内的相邻加速度差大于超范围门限时进行毛刺识别与处置,相邻加速度差不大于超范围门限时进行推力器点火或推力器熄火事件识别;
26、模块m2:进行超范围事件的毛刺识别与处置;
27、模块m2.1:设定单位时间内的相邻加速度差大于超范围门限时的滤波门限;
28、模块m2.2:两次单位时间内的相邻加速度差超范围事件的时差小于滤波门限被判定为毛刺;
29、模块m2.3:单位时间内的相邻单位时间内加速度差超范围事件为毛刺时,对单位时间内加速度差超范围时刻进行初始化,将单位时间内加速度差超范围时刻设为固定参考值;
30、模块m2.4:单位时间内的相邻加速度差为非毛刺跳变时,对加速度差超范围时刻进行更新;
31、模块m3:进行推力器点火或推力器熄火事件识别与处置;
32、模块m3.1:在单位时间内相邻加速度差不大于超范围门限时,对当前时刻与超差时刻做差得到超范围持续时间;
33、模块m3.2:设定超范围持续时间相对应的时差门限;
34、模块m3.3:在单位时间内相邻加速度差出现1次跳变时,后续加速度差保持跳变后的稳定变化状态,持续时间处于时差门限范围内识别卫星为调轨时的推力器点火事件或推力器熄火事件,并自主对定轨滤波器进行初始化操作,同时自主对单位时间内加速度差超范围时刻进行初始化。
35、优选的,所述模块m1.3中,以卫星最小推力器点火时单位时间内的加速度差值作为超范围门限。
36、优选的,所述模块m2.1中,以卫星推力器最短点火时长的1/2作为毛刺事件的滤波门限。
37、优选的,所述模块m3.2中,以卫星推力器最短点火时长的1/2作为时差门限的下限,以卫星发射时间与固定参考值的差值作为时差门限的上限。
38、根据本发明提供的存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现所述的卫星调轨时定轨滤波器自主初始化方法的步骤。
39、根据本发明提供的电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被处理器执行时实现所述的卫星调轨时定轨滤波器自主初始化方法的步骤。
40、与现有技术相比,本发明具有如下的有益效果:
41、(1)本发明解决了导航接收机定轨滤波器重新收敛时间较长的问题,保证导航接收机及时自主输出高精度的定位数据和定轨数据,满足载荷成像对位置精度的要求;
42、(2)本发明无需外界输入参数,使用实时定位的加速度数据自主识别卫星是否发生调轨事件,并识别加速度跳变是否为毛刺信号,以实现推力器点火和推力器熄火时自主对定轨滤波器进行初始化操作。
- 还没有人留言评论。精彩留言会获得点赞!