一种仿生扑翼机器人
本发明属于飞行器,具体涉及一种仿生扑翼机器人。
背景技术:
1、扑翼机器人是一类模仿生物扑翼运动原理的机器人,具有出色的机动性和适应性,被广泛应用于空中勘察、救援任务、环境监测等领域。然而,在扑翼机器人的动力传输组件方面,传统的连杆传动和曲柄摇杆机构存在一些技术问题,限制了其性能和应用的进一步提升。
2、传统的连杆传动结构虽然简单,但存在着不同步、不一致的动作问题。这是由于翅膀的弹性和飞行过程中的气动载荷等因素导致的,这可能导致机器人的飞行稳定性下降。此外,连杆传动结构还需要复杂的机械部件来实现同步运动,增加了机构的复杂性和重量。
3、曲柄摇杆机构是另一种常用的扑翼机器人动力传输结构,它包括单曲柄摇杆机构、双曲柄摇杆机构和空间曲柄摇杆机构。单曲柄摇杆机构具有高效、轻量化和易于微小化的特点,但其左右扑翼运动存在不对称和相位差的问题。双曲柄摇杆机构能够实现完全对称的双侧翅膀扑动,但由于引入了齿轮副或滑动副,传动效率会有所损失,同时也增加了结构体积和重量。
技术实现思路
1、本发明实施方式的目的在于提供一种仿生扑翼机器人,其结构简单,使用方便,能够较好的改善上述问题。
2、本发明的实施方式是这样实现的:
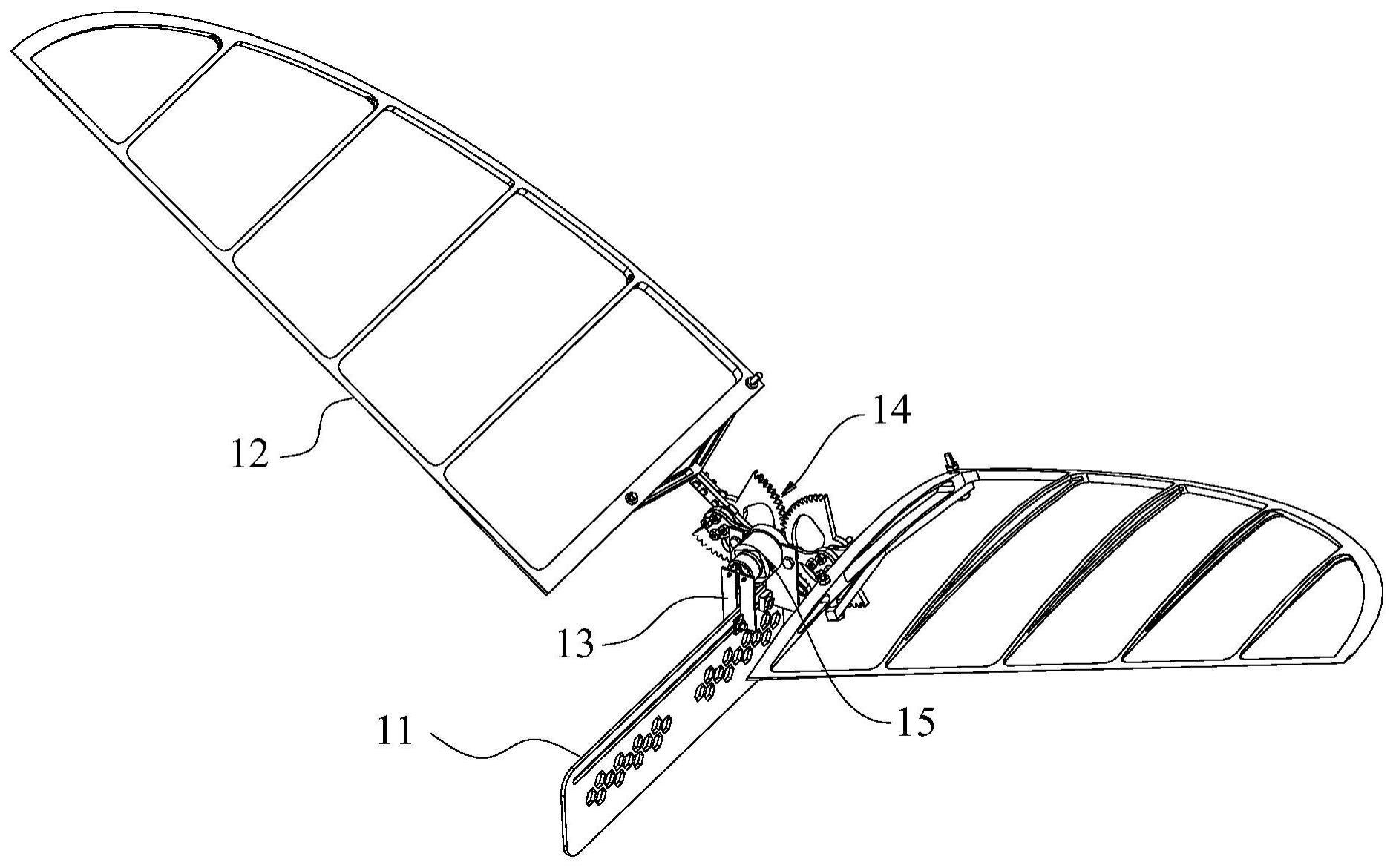
3、本发明的实施方式提供了一种仿生扑翼机器人,包括机身、机翼、固定架、摆动机构和驱动机构,所述固定架设置于所述机身上,所述驱动机构设置于所述固定架上,所述摆动机构包括支撑板、支撑轴、摆动齿轮、曲柄和摇杆,所述支撑板固定于所述固定架上且位于所述驱动机构的前端,所述支撑轴的数量为两根且对称设置于所述支撑板的两端,所述摆动齿轮的数量为两个且分别转动设置于两根所述支撑轴上,两个所述摆动齿轮相互啮合,所述摇杆的一端转动支撑于一根所述支撑轴上且与同轴的所述摆动齿轮固定连接,所述摇杆与其连接的所述摆动齿轮能够同步转动,所述摇杆的另一端为自由端,所述曲柄的一端与所述驱动机构连接,所述曲柄的另一端与所述摇杆滑动配合构成曲柄摇杆机构,所述机翼的数量为两个且对称分布于所述机身的两侧,两个所述机翼分别与两个所述摆动齿轮连接。
4、进一步的,所述摇杆上设有滑槽,所述曲柄的远离所述驱动机构的一端设有滑块,所述滑块滑动卡设于所述滑槽内。
5、进一步的,所述驱动机构包括驱动电机和减速器,所述驱动电机和所述减速器均固定于所述固定架上,所述驱动电机的输出轴与所述减速器的输入轴连接,所述减速器的输出轴与所述曲柄的一端连接。
6、进一步的,所述摆动齿轮上设有向外延伸的连接杆,所述机翼与所述连接杆可拆卸连接。
7、进一步的,两个所述摆动齿轮相对于机身中心呈对称分布。
8、进一步的,所述摇杆位于所述摆动齿轮与所述支撑板之间。
9、进一步的,所述摆动齿轮为扇形结构。
10、进一步的,所述摆动齿轮上设有减重孔。
11、本发明的有益效果为:
12、本发明实施方式提供的仿生扑翼机器人,摆动机构结构简单、重量轻、体积小、传动损耗也小,两侧的机翼能够完全同步摆动,较好的保证了飞行的稳定性和机动性。
技术特征:
1.一种仿生扑翼机器人,其特征在于:包括机身、机翼、固定架、摆动机构和驱动机构,所述固定架设置于所述机身上,所述驱动机构设置于所述固定架上,所述摆动机构包括支撑板、支撑轴、摆动齿轮、曲柄和摇杆,所述支撑板固定于所述固定架上且位于所述驱动机构的前端,所述支撑轴的数量为两根且对称设置于所述支撑板的两端,所述摆动齿轮的数量为两个且分别转动设置于两根所述支撑轴上,两个所述摆动齿轮相互啮合,所述摇杆的一端转动支撑于一根所述支撑轴上且与同轴的所述摆动齿轮固定连接,所述摇杆与其连接的所述摆动齿轮能够同步转动,所述摇杆的另一端为自由端,所述曲柄的一端与所述驱动机构连接,所述曲柄的另一端与所述摇杆滑动配合构成曲柄摇杆机构,所述机翼的数量为两个且对称分布于所述机身的两侧,两个所述机翼分别与两个所述摆动齿轮连接。
2.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述摇杆上设有滑槽,所述曲柄的远离所述驱动机构的一端设有滑块,所述滑块滑动卡设于所述滑槽内。
3.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述驱动机构包括驱动电机和减速器,所述驱动电机和所述减速器均固定于所述固定架上,所述驱动电机的输出轴与所述减速器的输入轴连接,所述减速器的输出轴与所述曲柄的一端连接。
4.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述摆动齿轮上设有向外延伸的连接杆,所述机翼与所述连接杆可拆卸连接。
5.根据权利要求1所述的仿生扑翼机器人,其特征在于:两个所述摆动齿轮相对于机身中心呈对称分布。
6.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述摇杆位于所述摆动齿轮与所述支撑板之间。
7.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述摆动齿轮为扇形结构。
8.根据权利要求1所述的仿生扑翼机器人,其特征在于:所述摆动齿轮上设有减重孔。
技术总结
本发明属于飞行器技术领域,公开了一种仿生扑翼机器人,包括机身、机翼、固定架、摆动机构和驱动机构,固定架设置于机身上,驱动机构设置于固定架上,摆动机构包括支撑板、支撑轴、摆动齿轮、曲柄和摇杆,支撑板固定于固定架上,支撑轴的数量为两根且对称设置于支撑板的两端,摆动齿轮的数量为两个且分别转动设置于两根支撑轴上,两个摆动齿轮相互啮合,摇杆的一端转动支撑于一根支撑轴上且与同轴的摆动齿轮固定连接,曲柄的一端与驱动机构连接,曲柄的另一端与摇杆滑动配合,机翼的数量为两个且对称分布于机身的两侧。其摆动机构结构简单、重量轻、体积小、传动损耗也小,两侧的机翼能够完全同步摆动,较好的保证了飞行的稳定性和机动性。
技术研发人员:赵武,白露露,张凯,于淼,郭鑫
受保护的技术使用者:四川大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!