一种多旋翼搜救无人机
本发明涉及无人机,尤其涉及一种多旋翼搜救无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主操作。当灾情或事故发生时,会伴随着人员受伤、被困等情况,搜救无人机通常能够起到很重要的作用。
2、现有的搜救无人机在长期工作时,镜头容易沾染较多的灰尘,且不便于清理,导致不能及时发现待营救人员,严重影响了搜救效果,降低了搜救效率,同时,由于灾情或事故现场情况通常较为复杂,时常会出现道路不通的情况,导致救援物资不能及时输送到位,易错过最佳的救援时机,降低了救援的成功率。为此,现提出一种多旋翼搜救无人机。
技术实现思路
1、本发明的目的在于提供一种多旋翼搜救无人机,解决了背景技术中提出的技术问题。
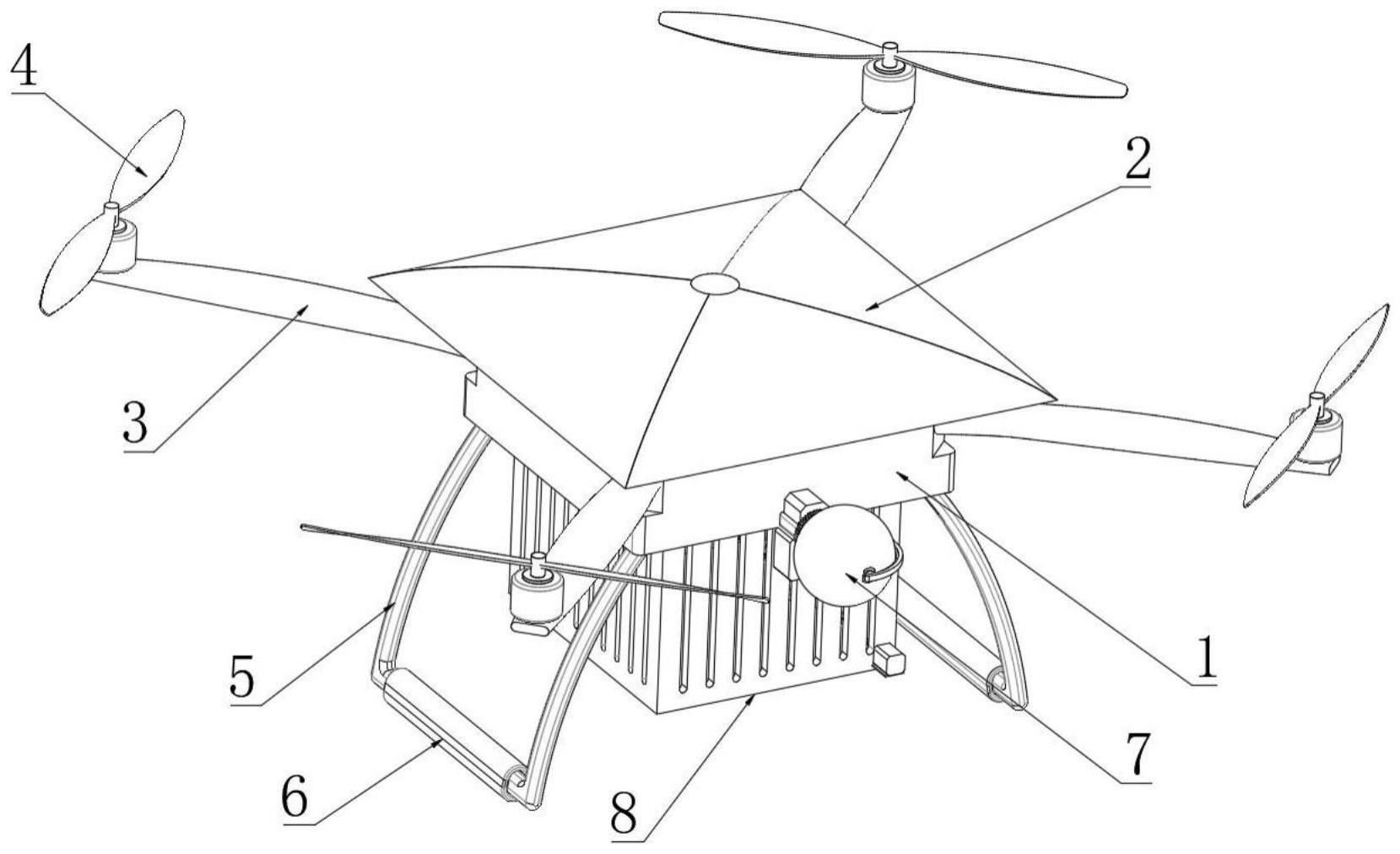
2、为实现上述目的,本发明提供如下技术方案:一种多旋翼搜救无人机,包括无人机主体,所述无人机主体的外侧端固定连接有若干个连杆,所述连杆远离无人机主体的一端设置有螺旋动力装置,所述无人机主体的左右两侧外壁对称固定连接有支撑架,所述支撑架上设置有减震套管,所述无人机主体的前侧端固定连接有监控机构,所述无人机主体内设置有储水腔,所述无人机主体上端设置有安装槽;
3、所述监控机构包括连接板、监控角度调节装置和摄像机,所述连接板固定在无人机主体的前侧端,所述连接板的前侧端与监控角度调节装置固定连接,所述摄像机固定在监控角度调节装置上,所述连接板上固定连接有防护罩,所述监控角度调节装置和摄像机均位于防护罩的内侧,所述连接板上套设有旋转环,所述连接板的左右两侧壁与旋转环的内侧壁滑动连接,所述旋转环上固定连接有清洗架。
4、优选的,所述清洗架呈弧形设置,所述清洗架的前侧端延伸至防护罩的前侧,所述防护罩的前侧端固定连接有角度传感器,所述角度传感器的测量端与清洗架的侧壁固定连接,所述清洗架靠近防护罩的侧壁上固定连接有清理刮板,所述清理刮板远离清洗架的侧壁与防护罩的外侧壁抵接,所述连接板的下端固定连接有清理电机,所述清理电机的输出端固定连接有主动齿轮,所述主动齿轮与旋转环传动连接。
5、优选的,所述连接板上固定连接有清洗水泵,所述清洗水泵的输入端与储水腔连通,所述清洗架内中空设置,所述清洗架的靠近防护罩的侧壁上开设有若干个喷水孔,所述喷水孔与清洗水泵的输出端连通。
6、优选地,所述安装槽内设置有控制器、设备电源、无线传输模块和远程控制模块,所述无人机主体的上端固定连接有光伏板。
7、优选的,所述无人机主体的下端固定连接有储物框,所述储物框的下端开口设置,所述储物框下端开口处设置有挡板,所述挡板左侧端的前后两侧分别与储物框前后两侧内侧转动连接,且挡板和储物框之间设置有扭力弹簧。
8、优选的,所述挡板的右侧设置有移动块,所述移动块的下端固定连接有卡板,所述卡板的右侧端与储物框的右侧内壁通过限位滑槽滑动连接,所述挡板上表面右侧端开设有抵接槽,所述抵接槽的前侧内壁开设有卡接槽,所述卡接槽与卡板相适配。
9、优选的,所述储物框的前侧外壁固定连接有投放电机,所述投放电机的输出端固定连接有转动丝杆,所述转动丝杆的后侧端依次贯穿储物框的前侧壁和移动块,并与储物框的后侧内壁转动连接,所述转动丝杆与储物框的前侧壁转动连接,所述转动丝杆与移动块螺纹连接。
10、与相关技术相比较,本发明提供的一种多旋翼搜救无人机具有如下有益效果:
11、1、本发明提供一种多旋翼搜救无人机,本装置中将监控机构中的监控角度调节装置和摄像机均设置在防护罩内侧,起到一定的防护作用,防护罩采用透明材质,保证外部装置不影响摄像机的正常使用,当外部灰尘等对防护罩造成污染时,通过清理电机带动主动齿轮转动,利用主动齿轮和旋转环配合带动清洗架转动,利用清洗架带动清理刮板转动,利用清理刮板对防护罩外侧表面的灰尘进行清理,同时利用清洗水泵将储水腔内的水导入到清洗架内,并从喷水孔喷出,对防护罩喷水操作,更利于防护罩表面污渍的清理,从而解决现有装置中摄像镜头上积灰影响摄像装置正常使用的问题。
12、2、本发明提供一种多旋翼搜救无人机,在进行物资投放时,控制投放电机带动转动丝杆转动,转动丝杆与移动块配合,带动移动块和卡板从卡接槽中移动至抵接槽位置处,在投放物资重力作用下带动挡板与储物框之间发生相对转动,当挡板处于竖直状态时,物资进行投放,当投放结束后,在扭力弹簧作用下,挡板转动,抵接槽移动至卡板的外侧,在投放电机的作用下带动转动丝杆转动,将卡板与卡接槽配合,完成对挡板位置的固定,利用储物框以及投放电机配合使用,在搜救过程中能够对被困人员进行救援物资的投放,解决了救援物资不能及时输送到位,易错过最佳的救援时机的问题。
13、3、本发明提供一种多旋翼搜救无人机,本装置中在无人机主体上端设置有光伏板,利用光伏板对设备电源进行电力补充,从而保证本装置在光照情况下时提供更多的电力支持,进而保证搜救工作稳定进行。
技术特征:
1.一种多旋翼搜救无人机,包括无人机主体(1),其特征在于:所述无人机主体(1)的外侧端固定连接有若干个连杆(3),所述连杆(3)远离无人机主体(1)的一端设置有螺旋动力装置(4),所述无人机主体(1)的左右两侧外壁对称固定连接有支撑架(5),所述支撑架(5)上设置有减震套管(6),所述无人机主体(1)的前侧端固定连接有监控机构(7),所述无人机主体(1)内设置有储水腔(33),所述无人机主体(1)上端设置有安装槽(9);
2.根据权利要求1所述的一种多旋翼搜救无人机,其特征在于:所述清洗架(20)呈弧形设置,所述清洗架(20)的前侧端延伸至防护罩(15)的前侧,所述防护罩(15)的前侧端固定连接有角度传感器(21),所述角度传感器(21)的测量端与清洗架(20)的侧壁固定连接,所述清洗架(20)靠近防护罩(15)的侧壁上固定连接有清理刮板(25),所述清理刮板(25)远离清洗架(20)的侧壁与防护罩(15)的外侧壁抵接,所述连接板(14)的下端固定连接有清理电机(17),所述清理电机(17)的输出端固定连接有主动齿轮(18),所述主动齿轮(18)与旋转环(19)传动连接。
3.根据权利要求1所述的一种多旋翼搜救无人机,其特征在于:所述连接板(14)上固定连接有清洗水泵(16),所述清洗水泵(16)的输入端与储水腔(33)连通,所述清洗架(20)内中空设置,所述清洗架(20)的靠近防护罩(15)的侧壁上开设有若干个喷水孔(24),所述喷水孔(24)与清洗水泵(16)的输出端连通。
4.根据权利要求1所述的一种多旋翼搜救无人机,其特征在于:所述安装槽(9)内设置有控制器(10)、设备电源(11)、无线传输模块(12)和远程控制模块(13),所述无人机主体(1)的上端固定连接有光伏板(2)。
5.根据权利要求4所述的一种多旋翼搜救无人机,其特征在于:所述无人机主体(1)的下端固定连接有储物框(8),所述储物框(8)的下端开口设置,所述储物框(8)下端开口处设置有挡板(26),所述挡板(26)左侧端的前后两侧分别与储物框(8)前后两侧内侧转动连接,且挡板(26)和储物框(8)之间设置有扭力弹簧。
6.根据权利要求5所述的一种多旋翼搜救无人机,其特征在于:所述挡板(26)的右侧设置有移动块(29),所述移动块(29)的下端固定连接有卡板(30),所述卡板(30)的右侧端与储物框(8)的右侧内壁通过限位滑槽滑动连接,所述挡板(26)上表面右侧端开设有抵接槽(31),所述抵接槽(31)的前侧内壁开设有卡接槽(32),所述卡接槽(32)与卡板(30)相适配。
7.根据权利要求5所述的一种多旋翼搜救无人机,其特征在于:所述储物框(8)的前侧外壁固定连接有投放电机(27),所述投放电机(27)的输出端固定连接有转动丝杆(28),所述转动丝杆(28)的后侧端依次贯穿储物框(8)的前侧壁和移动块(29),并与储物框(8)的后侧内壁转动连接,所述转动丝杆(28)与储物框(8)的前侧壁转动连接,所述转动丝杆(28)与移动块(29)螺纹连接。
技术总结
本发明公开了一种多旋翼搜救无人机,涉及无人机技术领域。无人机主体的左右两侧外壁对称固定连接有支撑架,无人机主体的前侧端固定连接有监控机构,无人机主体内设置有储水腔,无人机主体上端设置有安装槽,安装槽内设置有控制器、设备电源、无线传输模块和远程控制模块,无人机主体的上端固定连接有光伏,无人机主体的下端固定连接有储物框。当外部灰尘等对防护罩造成污染时,清理电机带动主动齿轮转动,主动齿轮和旋转环配合带动清洗架转动,利用清洗架带动清理刮板转动,利用清理刮板对防护罩外侧表面的灰尘进行清理,同时利用清洗水泵将储水腔内的水导入到清洗架内,并从喷水孔喷出,对防护罩喷水操作,更利于防护罩表面污渍的清理。
技术研发人员:周薇,周临震,刘大琨,袁铁军,张广冬,蒋刘义,管文,成玉群,金兴豪
受保护的技术使用者:盐城工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!