一种基于计算机视觉处理的地质环境监测无人机
本发明涉及无人机,具体为一种基于计算机视觉处理的地质环境监测无人机。
背景技术:
1、地质环境监测是对地球上的自然环境和人类活动造成的影响进行监测、评估和管理的过程。其包括对地表和地下水、土壤、大气、岩石、海洋、地震等方面的监测和评估,旨在了解环境变化的趋势和规律,及时发现和预测环境污染和自然灾害等问题,并采取相应的措施进行治理和修复,因监测的项目不同在环境监测过程中很容易受到各方面的限制和影响,因此在监测时大多是人工与无人机进行配合监测,以提高监测效率。
2、然而目前,地质环境监测工作主要通过人工巡查和传统遥感技术进行,这些方法存在着工作效率低下、成本高昂以及监测范围有限等不足之处,同时在针对一些特殊环境监测时,上述的方式方法中很容易受到限制,并且现有的无人机进行起降的过程中很容易因为飞行不稳定而造成损伤,因此,本领域的技术人员提供了一种基于计算机视觉处理的地质环境监测无人机,以解决上述背景技术中提出的问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于计算机视觉处理的地质环境监测无人机,解决了现有监测方式中存在工作效率低下和成本高昂以及很容易受到环境限制的问题。
3、(二)技术方案
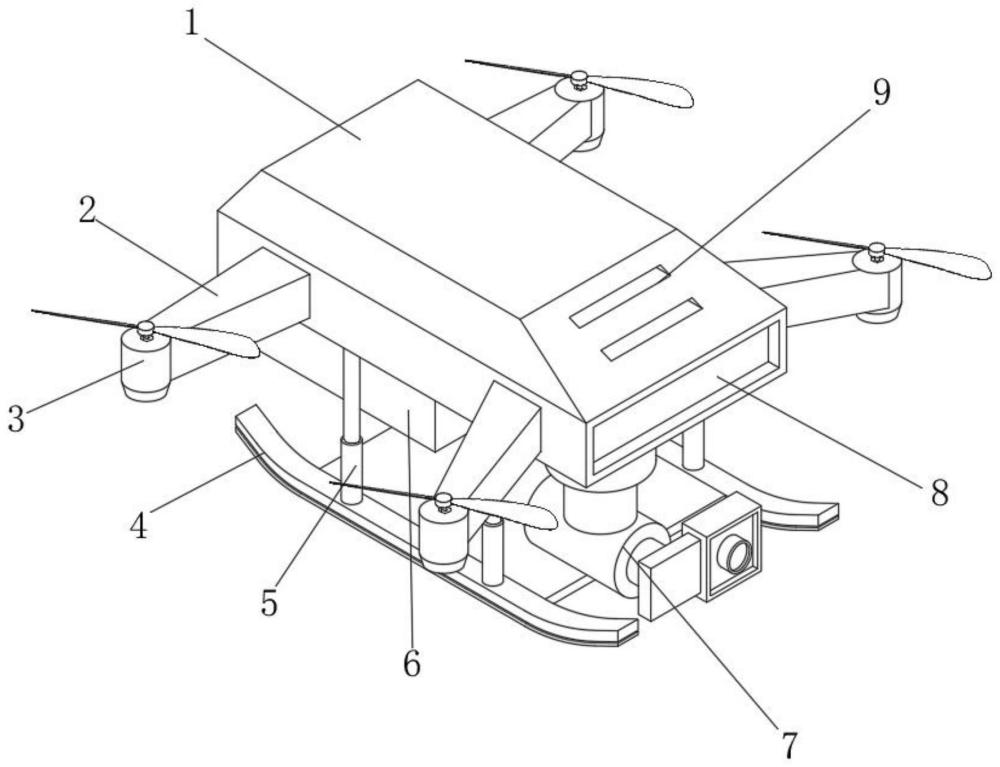
4、为实现以上目的,本发明通过以下技术方案予以实现:一种基于计算机视觉处理的地质环境监测无人机,包括本机,所述本机的两侧壁上分别对称固定连接有支臂,四个所述支臂的另一端分别固定连接有螺旋桨结构,所述本机的下端面中心靠后端处设置有电池包结构,所述本机的内部设置有控制系统,所述本机的下端设置有减震结构,所述减震结构的上端设置有四个电动伸缩杆,四个所述电动伸缩杆的上端分别固定连接在本机的下端面上,所述本机的下端面中心靠前侧边缘处设置有拍摄结构。
5、优选的,所述减震结构包括两个底架,两个所述底架的上内壁上分别固定连接有连接板,两个所述连接板的下端分别设置有底板,两个所述连接板的下端面中心处分别固定连接有多个弹簧,位于两侧多个所述弹簧两侧两个底架的两内侧壁上分别设置有滑槽,两个所述底板的两侧壁分别配合滑动连接在两个底架两内侧壁上的滑槽的内部,两侧多个所述弹簧的下端分别固定连接在底板的上端面上,两个所述底架之间设置有两个漂浮板,两个所述漂浮板的两端分别固定连接在两个底架的一侧壁上,两个所述漂浮板的内部分别设置有填充物。
6、优选的,所述控制系统包括mcu、定位模块、飞控系统、数据传输模块、控制中心、空气质量检测模块和超声波测距模块,所述定位模块、飞控系统、数据传输模块、控制中心、空气质量检测模块和超声波测距模块均与mcu电性连接。
7、优选的,所述拍摄结构包括视觉处理系统,所述视觉处理系统的下端设置有图像采集模块,所述图像采集模块包括红外热像仪和可见光成像设备,所述图像采集模块的下端设置有图像预处理模块,所述图像预处理模块的下端设置有特征提取模块,所述特征提取模块的下端设置有分类器模块,所述分类器模块的下端设置有应用模块,所述应用模块的下端设置有算法优化模块。
8、优选的,所述本机的前端面中心处设置有照明灯。
9、优选的,所述本机的上端靠前的侧壁上设置有多个采集孔,多个所述采集孔分别贯穿本机的侧壁并通至内部,且与空气质量检测模块的位置互相对应。
10、优选的,所述填充物的材质为泡沫。
11、优选的,两个所述底板的材质均为橡胶。
12、工作原理:本申请为一种基于计算机视觉处理的地质环境监测无人机,通过在无人机上搭载有红外热像仪703、可见光成像设备704,可以全方位、无遗漏地对环境进行监测,确保监测数据的全面性,无人机上超声波测距模块107,能保证在特殊环境中使用时无人机不会受到撞毁,可以采用自主飞行或人工控制飞行的方式进行操作,在飞行过程中,计算机视觉处理系统701将持续接收图像数据,并进行处理和分析,最终将监测结果反馈给用户,使得监测环境不受限制,同时监测数据更加准确,当受到下端的冲击时,内部的弹簧406将受到的冲击进行缓冲,同时与底板402和滑槽407进行配合,能最大程度减少弹簧406受到的冲击力反弹,从而起到良好的缓冲和减震效果,同时与两个漂浮板403配合使用,使其能短暂的停留在水面进行监测,适用范围更广。
13、(三)有益效果
14、本发明提供了一种基于计算机视觉处理的地质环境监测无人机。具备以下有益效果:
15、1、本发明中,通过设置拍摄结构,可以采用自主飞行或人工控制飞行的方式进行操作,在飞行过程中,计算机视觉处理系统将持续接收图像数据,并进行处理和分析,最终将监测结果反馈给用户,使得监测环境不受限制,同时监测数据更加准确。
16、2、本发明中,无人机上搭载有红外热像仪、可见光成像设备,可以全方位、无遗漏地对环境进行监测,确保监测数据的全面性,无人机上超声波测距模块,能保证在特殊环境中使用时无人机不会受到撞毁。
17、3、本发明中,通过在本机的下端设置有减震结构,使得使用时通过两个底板与地面接触配合内部的弹簧和与底架内侧壁进行滑动摩擦,从而可以有效的减少起降过程中产生的震动,能最大程度减少无人机受到的损伤,并且与两个漂浮板配合使用,使其能短暂的停留在水面进行监测,适用范围更广。
技术特征:
1.一种基于计算机视觉处理的地质环境监测无人机,包括本机(1),所述本机(1)的两侧壁上分别对称固定连接有支臂(2),四个所述支臂(2)的另一端分别固定连接有螺旋桨结构(3),所述本机(1)的下端面中心靠后端处设置有电池包结构(6),其特征在于:所述本机(1)的内部设置有控制系统,所述本机(1)的下端设置有减震结构(4),所述减震结构(4)的上端设置有四个电动伸缩杆(5),四个所述电动伸缩杆(5)的上端分别固定连接在本机(1)的下端面上,所述本机(1)的下端面中心靠前侧边缘处设置有拍摄结构(7)。
2.根据权利要求1所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述减震结构(4)包括两个底架(401),两个所述底架(401)的上内壁上分别固定连接有连接板(404),两个所述连接板(404)的下端分别设置有底板(402),两个所述连接板(404)的下端面中心处分别固定连接有多个弹簧(406),位于两侧多个所述弹簧(406)两侧两个底架(401)的两内侧壁上分别设置有滑槽(407),两个所述底板(402)的两侧壁分别配合滑动连接在两个底架(401)两内侧壁上的滑槽(407)的内部,两侧多个所述弹簧(406)的下端分别固定连接在底板(402)的上端面上,两个所述底架(401)之间设置有两个漂浮板(403),两个所述漂浮板(403)的两端分别固定连接在两个底架(401)的一侧壁上,两个所述漂浮板(403)的内部分别设置有填充物(405)。
3.根据权利要求1所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述控制系统包括mcu(101)、定位模块(102)、飞控系统(103)、数据传输模块(104)、控制中心(105)、空气质量检测模块(106)和超声波测距模块(107),所述定位模块(102)、飞控系统(103)、数据传输模块(104)、控制中心(105)、空气质量检测模块(106)和超声波测距模块(107)均与mcu(101)电性连接。
4.根据权利要求1所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述拍摄结构(7)包括视觉处理系统(701),所述视觉处理系统(701)的下端设置有图像采集模块(702),所述图像采集模块(702)包括红外热像仪(703)和可见光成像设备(704),所述图像采集模块(702)的下端设置有图像预处理模块(705),所述图像预处理模块(705)的下端设置有特征提取模块(706),所述特征提取模块(706)的下端设置有分类器模块(707),所述分类器模块(707)的下端设置有应用模块(708),所述应用模块(708)的下端设置有算法优化模块(709)。
5.根据权利要求1所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述本机(1)的前端面中心处设置有照明灯(8)。
6.根据权利要求3所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述本机(1)的上端靠前的侧壁上设置有多个采集孔(9),多个所述采集孔(9)分别贯穿本机(1)的侧壁并通至内部,且与空气质量检测模块(106)的位置互相对应。
7.根据权利要求2所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:所述填充物(405)的材质为泡沫。
8.根据权利要求2所述的一种基于计算机视觉处理的地质环境监测无人机,其特征在于:两个所述底板(402)的材质均为橡胶。
技术总结
本发明提供一种基于计算机视觉处理的地质环境监测无人机,涉及无人机领域。该基于计算机视觉处理的地质环境监测无人机,包括本机,所述本机的两侧壁上分别对称固定连接有支臂,四个所述支臂的另一端分别固定连接有螺旋桨结构,所述本机的内部设置有控制系统,所述本机的下端设置有减震结构,所述减震结构的上端设置有四个电动伸缩杆,四个所述电动伸缩杆的上端分别固定连接在本机的下端面上,所述本机的下端面中心靠前侧边缘处设置有拍摄结构。通过设置拍摄结构,在飞行过程中,计算机视觉处理系统将持续接收图像数据,并进行处理和分析,最终将监测结果反馈给用户,使得监测环境不受限制,同时监测数据更加准确。
技术研发人员:苟杨斯宇,周先前
受保护的技术使用者:西南石油大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!