一种二维转动抑振装置的制作方法
本发明涉及一种振动抑制装置,尤其涉及一种二维转动抑振装置。
背景技术:
1、弯曲振动在航天器在轨运行环境无处不在,如桁架天线、太阳翼和帆板等部件会在非均匀热载荷下产生弯曲振动。弯曲振动不仅会对部件自身的功能(如对地观测精度)和寿命产生影响,还会影响航天器的姿态稳定度和指向精度。随着桁架天线等部件的大型化,其质量和惯性力也急剧增加,对振动抑制装置的性能如承载能力、能量密度和响应速度提出了新的挑战。
2、近年来,不同构型的集成智能作动器(压电驱动器、音圈电机、磁流变阻尼器)的并联抑振平台被广泛提出和研究,最典型的如基于stewart(六自由度平台)机构的并联抑振平台。这类安装有六根支腿结构的并联平台,具六个方向上的抑振能力,包括三个平动方向和绕三个平动方向的转动方向。然而,该类型并联平台的各支腿之间通常存在严重的耦合关系,会导致动力学解算和控制算法设计十分复杂,进而影响振动控制精度和稳定性。六个支腿结构虽然增加了承载能力,但是也大幅增加了装置的质量。然而,航天环境对装置的质量控制极其严格。质量的增加势必会影响该类装置的实际应用。另外,桁架天线等部件通常产生弯曲振动,对平动方向的抑振能力的需求较小,那么,像stewart机构类的并联平台的多维抑振能力并不能充分发挥出来。
3、在智能作动器方面,压电驱动器由于具有结构简单、出力大、行程精度高等优点,被广泛用于并联抑振装置的作动器。然而,现有设计方案中,通常将压电驱动器单独使用,或者将其与放大机构配合使用,鲜有与非线性弹性元件集成使用的方案。导致传统方案难以协调压电驱动器作动行程和驱动能力的矛盾关系,行程过大会导致驱动能力急剧下降,而小行程下不能充分作动耗能。
技术实现思路
1、本发明为了解决背景技术中的问题,基于主动抑振原理,并结合压电驱动器的实际使用要求,本发明提出了一种二维转动抑振装置,通过以下技术方案实现:
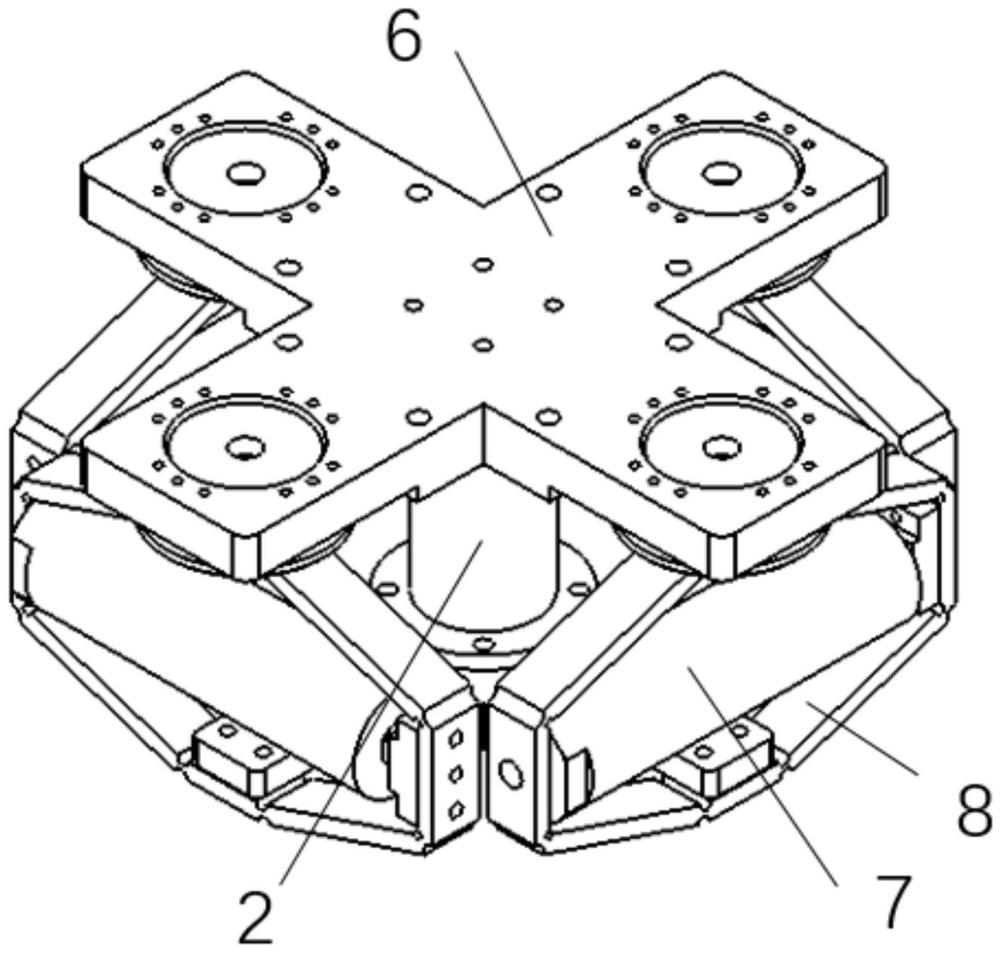
2、一种二维转动抑振装置,包括:基础平台,作为所述二维转动抑振装置的底座;球铰支撑,设置在所述基础平台上;负载平台,其位于所述球铰支撑上,并与所述球铰支撑的一端铰接,所述负载平台相对所述基础平台水平转动;所述负载平台,用于放置待抑振的负载;若干组支腿结构,若干组所述支腿结构环绕所述基础平台间隔设置,位于所述基础平台和所述负载平台之间。每一所述支腿结构包括:驱动单元和非线性弹性单元;所述驱动单元和所述非线性弹性单元串接;所述驱动单元设置在所述基础平台上,通过所述非线性弹性单元与所述负载平台连接。所述驱动单元用于产生转动驱动力,以通过所述非线性弹性单元带动所述负载平台翻转,从而抑制所述负载产生的弯曲振动。
3、可选地,所述球铰支撑包括:支撑筒,设置在所述负载平台上,所述支撑筒的顶端设有螺纹孔;所述负载平台的底面中心设有向顶面凹陷的球面凹槽。球头,所述球头与所述球面凹槽相匹配,且设置在所述球面凹槽内。球头螺杆,所述球头螺杆的一端设置在所述支撑筒的螺纹孔内,另一端与所述球头连接。球头盖,其贯穿所述球头螺杆,所述球头盖将所述球头与所述负载平台压紧。
4、可选地,所述球铰支撑还包括若干压紧螺钉,其用于将所述球头盖压紧在所述负载平台上,所述球头盖和所述负载平台之间的压紧度通过旋转压紧螺钉进行调节。
5、可选地,所述支腿结构为四组,四组所述支腿结构环绕所述基础平台间隔设置。
6、可选地,所述驱动单元包括:菱形放大结构,所述菱形放大结构整体呈菱形,其中包括两个沿竖直方向分布的第一顶角和第二顶角,两个沿水平方向分布的第三顶角和第四顶角。所述菱形放大结构设置在所述基础平台和所述负载平台之间上,所述第一顶角与所述非线性弹性单元连接;所述第二顶角与所述基础平台连接;所述菱形放大结构用于将压电驱动器的作动位移和方向进行放大和转换,以驱动所述非线性弹性单元转动;所述压电驱动器设置在所述菱形放大结构的内部,所述压电驱动器的两端分别与所述第三顶角和所述第四顶角连接,并且所述压电驱动器的水平轴线与所述基础平台的上端面平行;所述压电驱动器用于沿其水平轴线方向做往复的直线运动,以对所述菱形放大结构提供直线驱动力。垫块,设置在所述菱形放大结构和所述压电驱动器之间,用于将所述菱形放大结构和所述压电驱动器紧密贴合。
7、可选地,所述负载平台呈十字架状,每一所述十字架的端部底面设有安装孔。所述非线性弹性单元包括:圆筒,其内部中空,所述圆筒设置在所述安装孔内;端盖,设置在所述圆筒的下端面上,与所述圆筒的内部形成一个容纳空间。球面出力杆,所述球面出力杆的上端面为球面,所述球面出力杆的球面设置在所述容纳空间内,所述球面出力杆的另一端贯穿所述端盖与所述第一顶角固定连接。台阶垫块,位于所述容纳空间内,设置在所述球面出力杆的上端面上,其与所述球面出力杆的球面贴合在一起。上碟簧,位于所述容纳空间内,位于所述圆筒的顶端与所述台阶垫块之间。下碟簧,位于所述容纳空间内,位于所述球面出力杆球面的下部和所述端盖之间;所述下碟簧和上碟簧均处于压缩状态。
8、当所述支腿结构为四组时,四个所述圆筒两两一组,其中一组的两个所述圆筒称为第一圆筒和第二圆筒,对应的所述球面出力杆称为第一球面出力杆和第二球面出力杆;所述第一圆筒和所述第二圆筒之间的连线作为第一翻转轴;另外一组的两个所述圆筒称为第三圆筒和第四圆筒;对应的所述球面出力杆称为第三球面出力杆和第四球面出力杆;所述第三圆筒和所述第四圆筒之间的连线作为第二翻转轴。当所述第一球面出力杆相对所述第一圆筒做背向/相向运动时,所述第一圆筒产生竖直向下/向上的驱动力。所述第二球面出力杆相对所述第二圆筒做相向/背向运动时,所述第二圆筒产生竖直向上/向下的驱动力,以驱动所述负载平台沿所述第二翻转轴左右翻转。当所述第三球面出力杆相对所述第三圆筒做背向/相向运动时,所述第三圆筒产生竖直向下/向上的驱动力。所述第四球面出力杆相对所述第四圆筒做相向/背向运动时,所述第四圆筒产生竖直向上/向下的驱动力,以驱动所述负载平台沿所述第一翻转轴上下翻转。
9、可选地,所述第一负载的重量范围为0nm-20nm,所述第二负载的重量范围为20nm-100nm,当待抑振的所述负载为第一负载时,所述非线性弹性单元的等效刚度为第一等效刚度;当待抑振的所述负载为第二负载时,所述非线性弹性单元的等效刚度为第二等效刚度;所述第二等效刚度大于所述第一等效刚度。
10、可选地,所述非线性弹性单元还包括:垫片,位于所述容纳空间内,位于所述上碟簧与所述圆筒的顶端之间。
11、可选地,所述非线性弹性单元还包括紧定螺钉,所述紧定螺钉与所述圆筒的上端面螺纹连接,旋转所述紧定螺钉以调节所述下碟簧和所述上碟簧的压缩量。
12、可选地,当所述球面出力杆相对所述圆筒做背向运动时,所述下碟簧压缩量增大,所述上碟簧压缩量减小。当所述球面出力杆相对所述圆筒做相向运动时,所述下碟簧压缩量减小,所述上碟簧压缩量增大。
13、本发明至少具有以下技术效果之一:
14、(1)本发明提出的二维转动抑振装置,集成了驱动单元和非线性弹性元件,驱动单元通过菱形放大结构对压电驱动器的作动位移和方向进行放大和转换;非线性弹性单元提供非线性刚度,刚度随压缩量增大而增大,以协调压电驱动器作动行程和驱动能力的矛盾关系。本发明提出的二维转动抑振装置,能够保证压电驱动器在小负载情况能够充分作动以提供较大能量耗散作用,而在大负载情况下能够快速响应以完成驱动任务,具有高能量密度和高动态响应的特性。
15、(2)本发明提出的二维转动抑振装置,通过球铰支撑、菱形放大机构和球面出力杆的配合,将压电驱动器的直线运动转换为负载平台的转动,便于对弯曲振动进行抑制。
16、(3)本发明提出的二维转动抑振装置,驱动单元和非线性弹性单元串接成支腿结构,四组支腿结构绕中轴线均布,各支腿之间不存在耦合作用,相比于stewart平台等并联机构,无需进行动力学解耦运算,具有控制算法设计简单、控制精度高的优势。
- 还没有人留言评论。精彩留言会获得点赞!