万向节转向机构仿生蝴蝶飞行器
本发明涉及飞行机器人,尤其涉及一种仿生蝴蝶飞行器。
背景技术:
1、随着科技不断进步,仿生学作为一门研究生物形态、功能和行为的学科,吸引了越来越多的关注和研究。在仿生学的领域中,仿生蝴蝶作为一种研究对象具有重要意义。
2、蝴蝶作为昆虫界的美丽代表之一,拥有独特的翅膀结构和飞行方式,引发了人们的好奇心和探索欲望。仿生蝴蝶的研究旨在通过对蝴蝶翅膀的结构和形态进行分析,借鉴其特点来改进工程设计和技术应用,有助于提高飞行器的性能和效率。
3、仿生蝴蝶的研究主要集中在两个方面:翅膀结构和飞行机制。蝴蝶翅膀的结构具有轻盈、坚韧和柔性的特点,这使得蝴蝶能够在空中快速、灵活地飞行。
4、现有的仿生蝴蝶飞行器在进行姿态控制时,例如偏航滚转,通常采用增大单侧机翼面积或采用多动力源进行机翼差速扑动的方式来实现,对于目前增大单侧基因面积,实现姿态控制的方式,由于其增大的基因面积较少,在实际运动过程中产生的偏航滚转力仍有所不足。而对于差速扑动往往会面临在未进行姿态调整时就已经出现升力不对等,扑动幅度不一致的现象。
技术实现思路
1、本发明要解决的技术问题是:现有技术中的仿生蝴蝶飞行器不能够很好适应不同的飞行环境,在空中没有足够的机动性和稳定性,对于姿态控制缺乏有效解决方式。
2、为了解决上述技术问题,本发明提供了一种仿生蝴蝶飞行器,该仿生蝴蝶机器人提供如下技术方案,其包括。
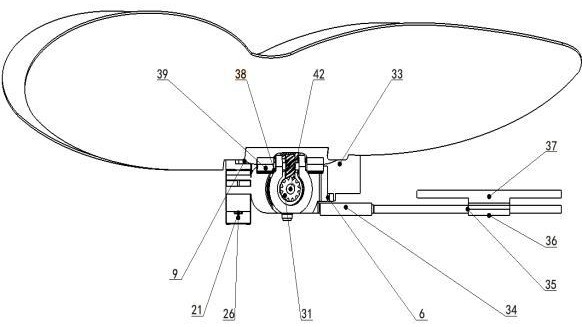
3、机架(6)。
4、一对机翼(28),安装在整个机架的左右两侧,嵌入在与其连接的翼夹板中。
5、六连杆-万向节转向装置,包括摇杆(8)(9)(10),双向万向节(1)(2)(3)(40),其中,六连杆由六支摇杆组成,安装于机架上侧,通过连接轴分别于位于机架(6)最前方的舵机(26)和机架(6)两侧固定双向万向节的套筒(7)相固连。双向万向节(1)(2)(3)位于机架的内部,同时穿过机架分布在两侧,由套筒固定,通过一根主连接轴(40)相互连接。
6、斜齿轮传动装制,包括位于机架最上方的主齿轮(32)以及与主齿轮相互啮合的副齿轮(43)和分布在两侧的4个小型斜齿轮(31)。主齿轮位于机架(6)上方,与舵机2(33)相固连,同时,通过与副齿轮的啮合,与位于两侧的双向万向轴相连接。位于机架两侧的两个小型斜齿轮(31)相互啮合,被固定在套筒内部,同时通过万向节-齿轮连接轴(38)与翼夹板(39)相固连。
7、平衡装置,其包括一根软管(34)方形轴(35)以及驱动控制板(37),软管位于整个机架的底部,与机架外壳相嵌合连接。同时,方形轴又嵌入在软管之内,驱动控制板通过套筒(36)与方形轴相固连。
8、优选的是,所述齿轮(31)(32)(43)皆为斜齿轮,且位于机架左侧的齿轮为左旋向,位于机架右侧的为右旋向。
9、优选的是,所述转向机制由双向万向节(1)(2)(3)与六连杆(8)(9)(10),舵机1(26)组成,双向万向节位于支架内部,六连杆位于整个机架的最上侧,通过连接轴与固定万向节的套筒和舵机1(26)相固连。
10、优选的是,所述斜齿轮传动机制由六个齿轮以及舵机2(33)组成。主齿轮在机架上侧通过连接轴与舵机2(33)相固连,四个小型斜齿轮位于机架两侧,固定在套筒(7)内部通过连接轴(38)与翼夹板(39)相连接。
11、优选的是,所述平衡机制,由软管(34)方形轴(35)和一块控制板(37)组成,三者嵌合连接,同时,软管又与机架底部嵌合。
12、优选的是,所述翼夹板(39)开设有缝隙,所述机翼(28)插于缝隙之中。
13、优选的是,在正常飞行过程中,舵机2(33)的转速是不会发生改变的。
14、与现有技术相比,本发明的仿生飞行器有如下增益效果。
15、(1)在机架内部设有双向万向节转向机制,万向节通过与相互啮合的五个传动齿轮相连接,五个传动齿轮又与翼夹板相连接,进而同时控制位于机架两侧的机翼互动情况,保证了在正常飞行过程中机翼的同速率扑动。而在机架的上侧设有六连杆传动机制,六连杆与最前方的舵机以及固定双向万向节的两侧套筒相固连。舵机转动带动六连杆,进而带动了万向节的前后旋转,使得与翼夹板相嵌合的机翼前后摆动,实现了在正常飞行过程中的灵活转向具有良好的可操纵性和稳定性。
16、(2)在机架内部设有双向万向节转向机制,万向节通过与相互啮合的五个传动齿轮相连接,五个传动齿轮又与翼夹板相连接,进而同时控制位于机架两侧的机翼互动情况,保证了在正常飞行过程中机翼的同速率扑动。而在机架的上侧设有六连杆传动机制,六连杆与最前方的舵机以及固定双向万向节的两侧套筒相固连。舵机转动带动六连杆,进而带动了万向节的前后旋转,使得与翼夹板相嵌合的机翼前后摆动,实现了在正常飞行过程中的灵活转向具有良好的可操纵性和稳定性。
17、(3)该仿生蝴蝶飞行器设置有特有的平衡装置,该装置的设计使得仿生蝴蝶飞行器能够适应不同的飞行条件。在机架的后侧设置有长软管,软管与驱动控制板相连接,软管内充填轻质气体,通过调整软管的弯曲程度,可以实现飞行器的平衡调节,保持在飞行过程中的稳定性。同时可以根据飞行器的实际情况进行自适应调节,具有良好的响应性。
技术特征:
1.一种仿生蝴蝶飞行器,其特征在于,包括。
2.机架(6)。
3.一对机翼(28),安装在整个机架的左右两侧,嵌入在与其连接的翼夹板中。
4.六连杆-万向节转向装置,包括摇杆(8)(9)(10),双向万向节(1)(2)(3)(40),其中,六连杆由六支摇杆组成,安装于机架上侧,通过连接轴分别于位于机架(6)最前方的舵机(26)和机架(6)两侧固定双向万向节的套筒(7)相固连。双向万向节(1)(2)(3)位于机架的内部,同时穿过机架分布在两侧,由套筒固定,通过一根主连接轴(40)相互连接。
5.斜齿轮传动装制,包括位于机架最上方的主齿轮(32)以及与主齿轮相互啮合的副齿轮(43)和分布在两侧的4个小型斜齿轮(31)。主齿轮位于机架(6)上方,与舵机2(33)相固连,同时,通过与副齿轮的啮合,与位于两侧的双向万向轴相连接。位于机架两侧的两个小型斜齿轮(31)相互啮合,被固定在套筒内部,同时通过万向节-齿轮连接轴(38)与翼夹板(39)相固连。
6.平衡装置,其包括一根软管(34)方形轴(35)以及驱动控制板(37),软管位于整个机架的底部,与机架外壳相嵌合连接。同时,方形轴又嵌入在软管之内,驱动控制板通过套筒(36)与方形轴相固连。
7.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:所述齿轮(31)(32)(43)皆为斜齿轮,且位于机架左侧的齿轮为左旋向,位于机架右侧的为右旋向。
8.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:所述转向机制由双向万向节(1)(2)(3)与六连杆(8)(9)(10),舵机1(26)组成,双向万向节位于支架内部,六连杆位于整个机架的最上侧,通过连接轴与固定万向节的套筒和舵机1(26)相固连。
9.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:所述斜齿轮传动机制由六个齿轮以及舵机2(33)组成。主齿轮在机架上侧通过连接轴与舵机2(33)相固连,四个小型斜齿轮位于机架两侧,固定在套筒(7)内部通过连接轴(38)与翼夹板(39)相连接。
10.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:所述平衡机制,由软管(34)方形轴(35)和一块控制板(37)组成,三者嵌合连接,同时,软管又与机架底部嵌合。
11.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:所述翼夹板(39)开设有缝隙,所述机翼(28)插于缝隙之中。
12.根据权利要求一所述的仿生蝴蝶飞行器,其特征在于:在正常飞行过程中,舵机2(33)的转速是不会发生改变的。
技术总结
本发明提供了一种仿生蝴蝶飞行器,其包括机架,一对机翼,驱动装置,舵机,斜齿轮传动装置,六连杆‑万向节转向装置,软管。该六连杆‑万向节转向机制,位于整个机架的前侧,万向节嵌在机架之内,在平稳正常飞行过程中呈对称镜像分布,由分布在机架两侧的套筒将其固定并控制。所述六连杆通过连接轴与套筒和位于机架前侧的舵机相连,前侧舵机带动连杆旋转,将转矩通过套筒传递至万向节,从而控制机翼产生偏航,所述万向节在产生偏航的过程中保证了两端扑翅频率一致,实现飞行过程中的平稳转向。所述斜齿轮传动机制,由六个斜齿轮组成,通过斜齿轮之间的相互啮合,传递舵机力矩,巧妙的斜齿轮设计减小了传动空间,使其能在更小的转弯半径内转弯。值得提及的是,本发明通过软管将翅膀分为前翅与后翅,在飞行过程中,通过前翅带动后翅可更好地模拟蝴蝶的飞行,从而提高整个系统性能。该仿生蝴蝶飞行器,拥有独特巧妙的转向机制,实现了低耗能状态下的机动与稳定,成本低,具有创新性。
技术研发人员:李文阳,吴天晨,代高权,杨帆,沈梓泓,王鸿菲,钟祖成
受保护的技术使用者:西南科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!