一种适用于快速降落的仿生起落架及无人机
本发明属于无人机配件,具体涉及一种适用于快速降落的仿生起落架及无人机。
背景技术:
1、无人机起落架是无人机底部用于起飞降落或地面时支撑无人机的部件。无人机起落架是支撑整架无人机的重要部件,是无人机不可缺少的一部分。
2、目前,现有常见的无人机起落架一般是四个支撑杆顶部设置卡扣装置,用于和无人机壳体的底部对接,四个支撑杆起到支撑无人机的作用。这种支撑杆在无人机降落,特别是质量较大的无人机降落时,在较大的冲击力作用下,会对起落架造成很大的反冲力,严重的甚至对无人机的结构造成损伤。因此,传统的起落架存在环境适应能力差、无法满足多旋翼无人机在复杂环境,例如斜面降落面或者高敏机动背景下着陆的需求。
3、通过观察蝗虫、蜻蜓等昆虫,不难发现,他们着陆腿是多着地的,并且在起降时采用脚感知和腿协调的方法,可在树枝、草地等任意复杂地形上稳定降落。考虑到多旋翼无人机的降落与鸟类、飞行类昆虫的栖息有着相似的需求,将仿生学的方法应用到新型无人机起落架的设计中,可以很好的解决传统起落架存在的问题并将其应用在高敏机动下的多旋翼无人机的降落场景中。
技术实现思路
1、本发明的目的是:旨在提供一种适用于快速降落的仿生起落架,用来解决现有的起落架结构缺陷导致的无人机降落时,对起落架造成很大的反冲力,严重的甚至对无人机的结构造成损伤的问题。
2、为实现上述技术目的,本发明采用的技术方案如下:
3、一种适用于快速降落的仿生起落架,包括:
4、连接座;
5、主臂,所述主臂与连接座固定连接;
6、副臂,所述副臂上端与主臂连接;
7、脚爪,所述脚爪包括铰接臂、爪体和爪尖,所述爪体的两端分别设有第一铰接轴和第二铰接轴,所述爪体经第一铰接轴与爪尖铰接,所述爪体经第二铰接轴与铰接臂铰接,所述副臂的下端设有第三铰接轴,所述副臂经第三铰接轴与铰接臂的中部铰接;
8、所述铰接臂上设有第一凸块,所述第一凸块沿铰接臂的长度方向开设有第一穿孔,所述第三铰接轴位于第一凸块和第二铰接轴之间;
9、所述爪尖上设有第二凸块,所述第二凸块沿爪尖的长度方向开设有第二穿孔,所述第二凸块位于第一铰接轴和第二铰接轴之间;
10、第三线性拉力机构,所述第三线性拉力机构的一端与主臂固定连接,所述第三线性拉力机构的自由端依次穿设在第一穿孔和第二穿孔内、且与爪尖固定连接。
11、进一步限定,所述副臂为包括筒体和杆体的弹簧阻尼器,所述杆体穿设在筒体内。这样的结构设计,通过将弹簧阻尼器作为副臂,在完成主臂与脚爪的连接的基础上,利用弹簧阻尼器的阻尼作用,对无人机降落时的冲击进行二次吸收,可进一步加强起落架的缓冲性能,实用性较强。
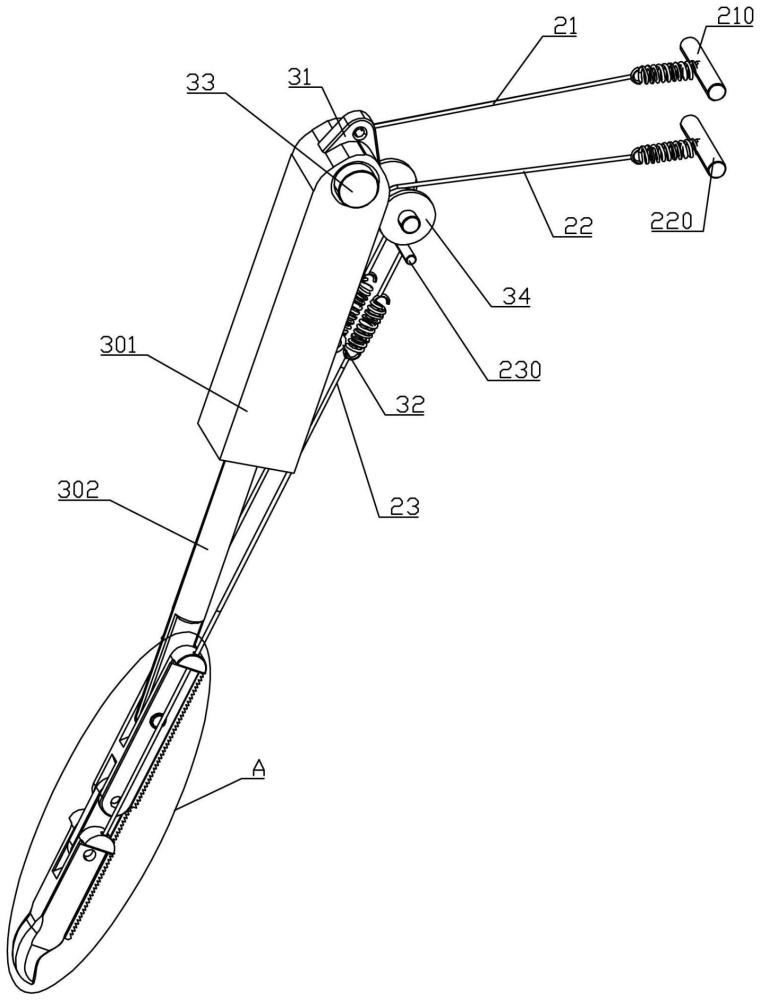
12、进一步限定,所述副臂的上端与主臂铰接,所述主臂与副臂之间设有弹性定位机构,所述弹性定位机构用于在副臂相对于主臂转动时,为副臂提供相反方向的拉力。这样的结构设计,通过副臂与主臂的铰接,配合弹性定位机构,形成一组新的缓冲机构,进一步加强起落架的缓冲性能,实用性较强。
13、进一步限定,所述副臂远离脚爪一端穿设有铰接柱,所述副臂经铰接柱与主臂铰接;
14、所述弹性定位机构包括第一线性拉力机构和第二线性拉力机构,所述第一线性拉力机构和第二线性拉力机构均与主臂固定连接;
15、所述第一线性拉力机构用于在副臂围绕铰接柱逆时针转动时,为副臂提供顺时针转动的拉力;
16、所述第二线性拉力机构用于在副臂围绕铰接柱顺时针转动时,为副臂提供逆时针转动的拉力。这样的结构设计,通过第一线性拉力机构和第二线性拉力机构构成弹性定位机构,在未受外力作用时,保持主臂与副臂之间的铰接角度,同时在副臂产生相对于主臂转动时,为副臂提供相反方向的拉力的目的,结构简单,安装方便。
17、进一步限定,所述第一线性拉力机构和第二线性拉力机构均包括弹簧和绳体。这样的结构设计,通过弹簧和绳体构成第一线性拉力机构、第二线性拉力机构,结构简单,安装方便,实用性较强。
18、进一步限定,所述弹性定位机构还包括第一固定柱、第二固定柱、第一连接块和第二连接块,所述第一固定柱、第二固定柱均固定安装在主臂上;
19、所述第一连接块固定安装在副臂上、且位于铰接柱与第二固定柱之间连线的上方,所述第一线性拉力机构的两端分别与第一固定柱、第一连接块固定连接;
20、所述第二连接块固定安装在副臂上、且位于铰接柱与第二固定柱之间连线的下方,所述第二线性拉力机构的两端分别与第二固定柱、第二连接块固定连接。这样的结构设计,通过弹性定位机构对第一连接块、第二连接块的拉动,实现在副臂相对于主臂转动时,为副臂提供相反方向的拉力的目的,结构简单,安装方便,实用性较强。
21、进一步限定,所述主臂上转动安装有定滑轮,所述第二线性拉力机构绕设在定滑轮上。这样的结构设计,通过定滑轮对第二线性拉力机构的路径进行限定,使得第二线性拉力机构尽可能的贴近主臂和副臂,避免第二线性拉力机构外露而造成的安全隐患问题,实用性较强。
22、进一步限定,所述第三线性拉力机构包括弹簧和绳体。这样的结构设计,通过弹簧和绳体构成第三线性拉力机构,结构简单,安装方便,实用性较强。
23、进一步限定,所述铰接臂、爪体和爪尖的下端面均为粗糙面。这样的结构设计,通过粗糙面的设置,可加大脚爪与着陆平台的摩擦力,起防滑作用,实用性较强。
24、本发明还公开了一种无人机,包括机身和四个上述的一种适用于快速降落的仿生起落架,四个所述连接座与机身固定连接、且对称分布于机身两侧的底部。
25、采用上述技术方案的发明,具有如下优点:
26、1、通过铰接臂、爪体、爪尖和第三线性拉力机构的相互配合,形成一组多级式缓冲结构,对无人机着陆时,承受的反冲力进行吸收,结构简单,缓冲效果好,可减小对无人机结构造成损伤的概率;
27、2、缓冲机构由铰接臂、爪体、爪尖三段相互铰接而成,在不平整、倾斜的地面上,具有较好的停止效果,实用性强;
28、3、通过将弹簧阻尼器作为副臂,在完成主臂与脚爪的连接的基础上,利用弹簧阻尼器的阻尼作用,对无人机降落时的冲击进行二次吸收,可进一步加强起落架的缓冲性能,实用性较强;
29、4、通过副臂与主臂的铰接,配合弹性定位机构,形成一组新的缓冲机构,进一步加强起落架的缓冲性能,实用性较强;
30、5、通过三组相互配合的缓冲机构,仿照昆虫的腿部结构,共同实现对无人机着陆时的缓冲,进一步加强缓冲效果,对无人机进行进一步保护,实用性较强;
31、6、通过第一线性拉力机构和第二线性拉力机构构成弹性定位机构,在未受外力作用时,保持主臂与副臂之间的铰接角度,同时在副臂产生相对于主臂转动时,为副臂提供相反方向的拉力的目的,结构简单,安装方便;
32、7、通过弹簧和绳体构成第一线性拉力机构、第二线性拉力机构、第三线性拉力机构,结构简单,安装方便,实用性较强;
33、8、通过弹性定位机构对第一连接块、第二连接块的拉动,实现在副臂相对于主臂转动时,为副臂提供相反方向的拉力的目的,结构简单,安装方便,实用性较强;
34、9、通过粗糙面的设置,可加大脚爪与着陆平台的摩擦力,起防滑作用,实用性较强。
- 还没有人留言评论。精彩留言会获得点赞!