光电引导设备、飞行器及引导方法与流程
本申请涉及飞行器助降,具体而言,涉及光电引导设备、飞行器及引导方法。
背景技术:
1、飞机降落在短而窄的海上运动平台时,需要助降引导,例如:引导指挥官、光学助降系统或者雷达引导。引导指挥官采用信号旗帜,根据经验和敏捷准确的判断,引导飞机进行准确降落。光学助降技术是利用光学原理,在空中形成中心光柱与甲板成3°左右的五层光柱,飞机降落时,飞行员根据看到的光柱颜色来实时调整飞机的高度。雷达引导采用主动雷达波照射飞机,实时测量飞机的方位、俯仰、距离和速度信息,通过无线电通讯技术将测得的数据传输给飞行员,飞行员根据得到的测量数据进行精确控制飞机,使飞机进行准确降落。
2、现有技术中,信号旗帜和光学助降技术作用距离太近,飞行员的最大可见距离范围在2海里内,不能满足速度更快的飞机降落需求;主动雷达波照射飞机,在电磁静默工况下不被允许,且雷达图像的分辨率不够,画面不够清晰直观,不能呈现背景图像。如何解决上述技术问题,是本领域技术人员需要考虑的。
技术实现思路
1、本申请提供光电引导设备、飞行器及引导方法,以解决如何提升助降引导的测量精度和效率的问题。
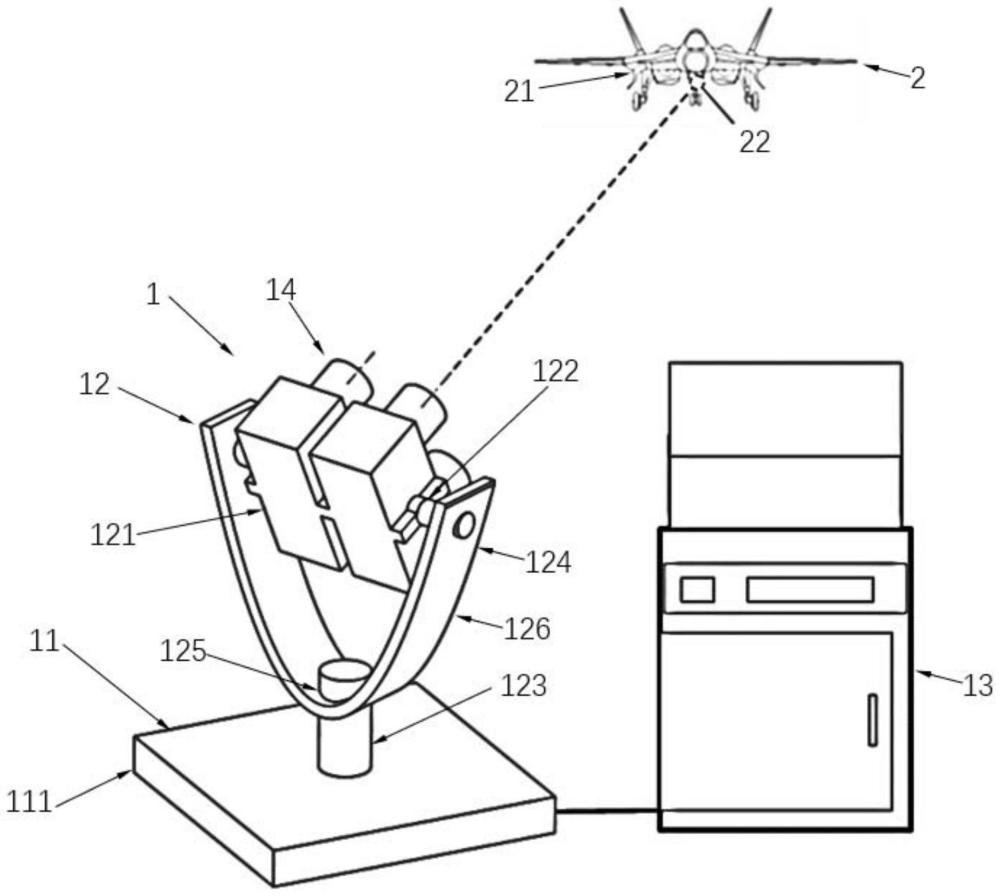
2、第一方面,本申请的实施例提供一种光电引导设备,包括座件、方位组件、俯仰组件、传感器组件。座件包括安装基座。方位组件设于所述安装基座。俯仰组件包括俯仰支架和连接法兰,所述连接法兰设于所述俯仰支架与所述方位组件之间,所述俯仰支架与所述方位组件通过连接法兰连接。传感器组件包括传感器支架以及与所述传感器支架固定连接的中波红外传感器、变焦可见光相机、激光传感器和短波红外传感器,所述传感器支架可活动地设于所述俯仰支架,所述中波红外传感器和所述变焦可见光相机用于捕获飞行器,在所述中波红外传感器和所述变焦可见光相机捕获飞行器后,所述激光传感器用于朝向所述飞行器发射激光,所述短波红外传感器用于接收所述飞行器反射的激光回波。
3、相较于现有技术,本实施例提供的光电引导设备通过安装基座固定安装在平台上,通过方位组件的方位运动以及俯仰组件的俯仰运动带动传感器组件转动以捕获目标飞行器;通过中波红外传感器和变焦可见光相机相互配合以捕获飞行器,并对飞行器进行粗跟踪;通过激光传感器朝向飞行器发射激光,短波红外传感器接收飞行器反射的激光回波,以对飞行器进行精确跟踪,因此光电引导设备能够快速精确跟踪飞行器,以达到提升助降引导的测量精度和效率的效果。
4、在一种可能的实施方式中,所述光电引导设备还包括显控台,所述显控台分别与所述中波红外传感器与所述变焦可见光相机电连接,所述显控台用于处理所述中波红外传感器与所述变焦可见光相机捕获飞行器的图像。
5、在一种可能的实施方式中,所述显控台与所述激光传感器电连接,用于控制开启所述激光传感器以获取所述飞行器的距离信息和速度信息。
6、在一种可能的实施方式中,所述显控台与所述短波红外传感器电连接,用于对所述激光回波进行成像并且对所述飞行器进行跟踪和测量。
7、第二方面,本申请的实施例还提供一种飞行器,所述飞行器用于与光电引导设备配合使用,所述飞行器包括机身和光学合作靶标。机身用于被所述中波红外传感器和所述变焦可见光相机捕获。光学合作靶标设于所述机身,所述光学合作靶标用于反射所述激光传感器发射的激光并且使激光回波进入所述短波红外传感器。
8、在一种可能的实施方式中,所述光学合作靶标包括角锥棱镜、壳体和底座,所述底座一端与所述机身固定连接、另一端与所述壳体连接,所述角锥棱镜固定于所述壳体内。
9、在一种可能的实施方式中,所述光学合作靶标设于所述机身的起落架前臂。所述飞行器还包括紧固螺钉和防转销,所述紧固螺钉和所述防转销沿着竖直方向间隔设于所述起落架前臂,所述光学合作靶标通过所述紧固螺钉和所述防转销与所述起落架前臂固定连接。
10、第三方面,本申请的实施例还提供一种引导方法,提供光电引导设备,所述光电引导设备还包括显控台,所述引导方法包括以下步骤;所述光电引导设备接收到引导命令后,所述变焦可见光相机和所述中波红外传感器搜索飞行器;在所述变焦可见光相机和所述中波红外传感器搜索到所述飞行器时,所述显控台分别对所述变焦可见光相机的图像和所述中波红外传感器的图像进行处理,得到两路图像偏差信息,把两路图像偏差信息进行卡尔曼数据融合,得到所述飞行器的偏差信息,所述飞行器的偏差信息进行目标闭环跟踪控制;在所述变焦可见光相机和所述中波红外传感器稳定跟踪所述飞行器后,所述显控台主动开启所述激光传感器,所述激光传感器获取所述飞行器的径向距离信息,并根据得到的距离信息解算出所述飞行器的速度信息;同时所述短波红外传感器对激光回波进行成像,并判断成像稳定性,在成像稳定后,所述显控台提取激光回波像点的偏差信息,所述显控台过渡为采用短波通道对所述飞行器进行跟踪和测量。
技术特征:
1.一种光电引导设备,其特征在于,包括:
2.根据权利要求1所述的光电引导设备,其特征在于:
3.根据权利要求2所述的光电引导设备,其特征在于:
4.根据权利要求3所述的光电引导设备,其特征在于:
5.一种飞行器,其特征在于,所述飞行器用于与权利要求1至4中任一项所述的光电引导设备配合使用,所述飞行器包括:
6.根据权利要求5所述的飞行器,其特征在于:
7.根据权利要求6所述的飞行器,其特征在于:
8.一种引导方法,其特征在于,包括:
技术总结
本申请涉及飞行器助降技术领域,旨在解决如何提升助降引导的测量精度和效率的问题,提供光电引导设备、飞行器及引导方法。光电引导设备包括座件、方位组件、俯仰组件、传感器组件。座件包括安装基座。俯仰组件包括俯仰支架和连接法兰,俯仰支架与方位组件通过连接法兰连接。传感器组件包括传感器支架以及与传感器支架固定连接的中波红外传感器、变焦可见光相机、激光传感器和短波红外传感器,在中波红外传感器和变焦可见光相机捕获飞行器后,激光传感器朝向飞行器发射激光,短波红外传感器接收回波。本实施例提供的光电引导设备通过对飞行器粗跟踪并通过激光传感器和短波红外传感器对飞行器精确跟踪,以达到提升助降引导的测量精度和效率的效果。
技术研发人员:兰林涛,张东,刘钻东,高尚,刘攀,王波,王杰艳
受保护的技术使用者:华中光电技术研究所(中国船舶集团有限公司第七一七研究所)
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!