六自由度双超卫星气浮台系统的制作方法
本发明属于双超卫星,具体地,涉及六自由度双超卫星气浮台系统,尤其是一种大惯量六自由度双超卫星气浮台系统。
背景技术:
1、近年来,航天技术得到快速发展;地球静止轨道以其相对地球表面位置近似不变而受到青睐。然而,由于地球静止轨道资源有限,地球静止轨道卫星需要具备多样化和复杂化的功能。动静隔离的双超卫星技术是超静、超稳卫星平台的理想解决途径,有利于突破大惯量地球静止轨道卫星指向精度不高、稳定度低等技术瓶颈。然而,大惯量双超卫星地面原理验证面临着惯量大、自由度多、系统复杂、精度要求高等技术难题。
2、现有的相关技术成果主要如下:
3、(1)双五自由度气浮主从式非接触双超卫星地面原理验证系统(专利文献cn106467175a),该专利文献公开了一种双五自由度气浮主从式非接触双超卫星地面原理验证系统,利用平面气浮装置和球面气浮装置设计了载荷舱和平台舱双五自由度地面验证系统,但该系统无法模拟卫星平台的超大惯量。
4、(2)动静隔离主从协同控制的双超卫星平台(专利文献cn104477410a),该专利文献提供了一种动静隔离主从协同控制的双超卫星平台,提出利用多个磁浮机构实现载荷舱和服务舱的非接触设计,但该系统不具备敏捷机动能力。
5、(3)双超卫星八杆六自由度卫星平台及其解耦控制方法(专利文献cn105059568a),该专利文献提供了一种双超卫星八杆六自由度卫星平台及其解耦控制方法,提出利用八个磁浮机构实现系统六自由度运动,这使得该系统设计较为复杂。
6、(3)主从式非接触双超卫星地面原理验证系统(专利文献cn106364699a)提出平台舱和载荷舱分别通过主动气浮和单轴被动气浮或主动气浮于大理石平台,该系统载荷舱仅具有单轴模拟能力,无法模拟轴间串扰影响。
7、(4)随动跟踪型动静隔离式双超卫星平台及其制作方法(专利文献cn105151321a)专利文献,该专利文献提供了一种随动跟踪型动静隔离式双超卫星平台及其制作方法,但该方法的卫星平台转动惯量下、机动能力差。
8、(5)对日惯性定向的主从非接触双超卫星平台(专利文献cn107792405a)提出一种对日惯性定向的主从非接触式双超卫星平台设计方法,该系统无法实现敏捷机动。
9、(6)动静隔离、主从协同控制双超卫星平台设计(cn:31-2169/v),文章公开了八杆触磁浮机构实现载荷舱与平台舱非接触设计,但该系统无法实现等惯量模拟。
10、专利文献cn106516182a受限于平台舱和载荷舱设计,无法实现大惯量模拟,且该专利文献无法直观显示姿态机动效果。此外,该专利文献无法定量评估“双超”卫星平台动静隔离效果。
11、针对大惯量模拟,本发明采用平台舱桁架连接结构,从而拓展平台舱转动惯量,载荷舱采用大惯量的气浮平台;针对姿态机动效果无法直观显示问题,本发明采用激光发射器和地面靶标实现机动效果展示;针对动静隔离效果定量评估问题,本发明采用非接触激光测振仪实现隔振效果定量化评估。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种大惯量六自由度双超卫星气浮台验证系统。
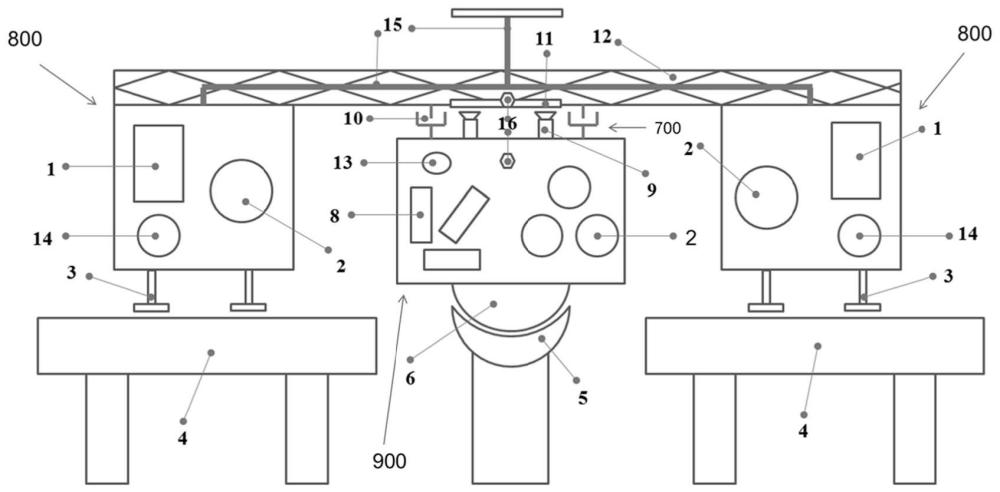
2、根据本发明提供的一种六自由度双超卫星气浮台验证系统,主要由载荷舱900、平台舱800、舱间设备700、桁架12构成;
3、所述舱间设备700,包括:多套磁浮作动器10和多套激光位移传感器9,多套磁浮作动器10和多套激光位移传感器9间隔设置;
4、所述载荷舱900与平台舱800不接触,平台舱800设置于载荷舱900两侧,且多台平台舱800间通过桁架12连接在一起,通过磁浮作动器10实现载荷舱900的稳态控制和姿态机动,激光位移传感器9用于测量并解算载荷舱900和平台舱800之间的相对位置和相对姿态。
5、优选地,所述载荷舱900,包括:激光跟踪仪8、光电自准直仪13、激光发射器17,且与载荷舱900配合设置有气浮球轴承6,载荷舱900通过气浮球轴承6实现三轴转动,由三轴气浮球轴承6支撑于地面。
6、优选地,还包括光纤陀螺2,所述光纤陀螺2用于确定角速度,载荷舱900的角速度确定通过设置于载荷舱900的光纤陀螺2实现;平台舱800姿态角和角速度通过设置在平台舱800的光纤陀螺2积分得到。
7、优选地,所述平台舱800主要由桁架12连接的气浮平台组成,平台舱800依靠气足3浮于大理石平台4;平台舱800的每个舱段均设置有一台光纤陀螺2和一台控制力矩陀螺1。
8、优选地,所述六自由度双超卫星气浮台地面验证系统还包括:飞轮140、非接触激光测振仪(19)、气路(15)、非接触激光测振仪靶标16,其中飞轮14设置于平台舱800;
9、非接触激光测振仪19设置于需要测量其隔振效果的平台舱800和载荷舱900侧;
10、气路15垂直悬吊于载荷舱9000上方,并设置在桁架(12上,用于保障平台舱800均匀气浮供气,平台舱800和载荷舱900上均设置有非接触激光测振仪靶标16。
11、优选地,所述载荷舱900的执行机构为磁浮作动器10,平台舱800的执行机构为控制力矩陀螺1。
12、优选地,所述载荷舱900还包括:激光发射器17;激光发射器17通过地面靶标18指向。
13、优选地,所述六自由度双超卫星气浮台地面验证系统还包括:气足3和大理石浮台4,所述平台舱800依靠气足3浮于大理石平台4。
14、优选地,所述六自由度双超卫星气浮台地面验证系统还包括:激光位移标准反射镜11、气浮球轴承支座5;
15、所述激光位移标准反射镜11设置于桁架12,与激光位移传感器9对应;
16、所述气浮球轴承支座5设置于气浮球轴承6下。
17、根据本发明提供的一种六自由度双超卫星气浮台地面验证方法,采用所述的六自由度双超卫星气浮台地面验证系统,包括如下步骤:
18、步骤s1:对平台舱底部安装气足3并放置于大理石平台4上,用于支撑平台舱800;所有撑杆与层间高度相配合,装配时采用标准垫片加厚调整;舱间连接桁架采用桁架12单元搭建;载荷舱900采用三层结构,各层安装形式与平台舱800相似;载荷舱900底部为气浮球轴承6,气浮球轴承6放置于气浮球轴承支座5上;其中,平台舱800采用三层结构,底层用以安装气瓶,中层与顶层用以安装试验所需单机;其中,顶层也提供标准桁架12固定接口;层与层之间用撑杆加强;
19、步骤s2:在平台舱800设置光纤陀螺2实现平台舱800的姿态角和角速度确定;在平台舱上设置有飞轮14用于模拟挠性振动和液体晃动影响;载荷舱900设置有激光跟踪仪8、光电自准直仪13和光纤陀螺2,采用激光发射器17用于模拟光轴指向,采用靶标18接收激光光斑;载荷舱900上方垂直悬吊有气路15;
20、步骤s3:在光电自准直仪13)工作的范围内,通过光电自准直仪(13)和光纤陀螺2联合定姿,确定当地的地速和陀螺的常值漂移项b,则系统的角速度ωp即为:
21、ωp=ωc-b
22、其中:ωc为陀螺测量值;b为光电自准直仪13和陀螺联合估计得到的地速和常值漂移项;
23、步骤s4:令整体系统模拟平台舱800和载荷舱900绕整星z轴机动;载荷舱900的机动通过四台磁浮作动器10提供控制力矩,平台舱800的姿态机动分别通过两个舱段上的控制力矩陀螺1实现;其中,载荷舱900具备三轴旋转运动能力,平台舱800具备绕整星质心一维旋转,同时具备二维平动能力;其中,卫星的x轴指向卫星所在轨道平面的法向,y轴与x轴垂直且指向卫星运动方向,z轴与x、y轴垂直,形成右手坐标系。
24、与现有技术相比,本发明具有如下的有益效果:
25、与传统双超卫星地面原理验证方法相比,大惯量六自由度双超卫星气浮平台地面原理验证系统具有如下特点:
26、(1)通过桁架相连型平台舱以及超大载荷舱,具备验证整星超大转动惯量能力;
27、(2)通过动静隔离可以实现载荷舱姿态超高稳定度;
28、(3)通过磁浮作动器可以实现载荷舱的敏捷机动验证。
- 还没有人留言评论。精彩留言会获得点赞!