地质灾害重建用的自稳型无人机的制作方法
本技术涉及无人机领域,尤其是涉及地质灾害重建用的自稳型无人机。
背景技术:
1、无人机的全称是无人驾驶飞机(unmanned aerial vehicle),英文缩写为“uav”,是一种利用无线电遥控操纵或自主程序控制、机上无人驾驶的可重复使用的航空器。
2、无人机由五大部分组成:
3、一、机身:是无人机的主要骨架,一般采用轻物料制造为主,以减轻无人机的负载量,其他零部件都需要按照机身的布局进行安装。
4、二、动力系统:包括两部分,一部分是电源模块,一个是动力输出系统。电源就是为电机提供能量的,而电机是通过电调的控制带动桨叶旋转,为无人机提供动力。由螺旋桨、电机、电子调速器和动力电源组成,具体如下:
5、1、螺旋桨:无人机产生推力的主要部件,常见的多旋翼无人机一般搭配4个螺旋桨,两个顺时针旋转,两个逆时针旋转。对于一种电机来说螺旋桨过大或过小都不太好,多轴飞行器的操纵主要就是依靠改变电机的转速,使每个螺旋桨产生不同的升力来进行操纵。
6、2、电机:俗称马达,能将电能转化为机械能,带动螺旋桨旋转,从而产生推力。在微型无人机当中使用的动力电机可以分为两类:有刷电动机和无刷电动机。其中有刷电动机由于效率较低,且会产生摩擦,在快速旋转时难以控制,在无人机领域已逐渐不再使用。无刷电机里面的电刷不转被称为定子,外面的永磁体转动被称为转子。无刷电机需要用交流电来驱动所以外面需要接上一个电子调速器。
7、电动机的技术指标很多,与无人机动力特性最相关的两个是转速和功率。转速一般用kv来表示,所谓kv是指每伏特(v)能达到的空载每分钟转速。比如,使用kv1000的电机,11.1v电池,电机转速应该是1000x11.1=11100.即每分钟11100转。即每增加1v电机空载转速增加1000转。
8、3、电子调速器:不仅可以调节电机转速,也可以为遥控接收器上其他通道的舵机供电,还能将电池提供的直流电转换为可直接驱动电机的三相交流电。动力电机的调速系统称为电调,全称为电子调速器,英文为electronic spedcotoller,简称esc,它根据控制信号调节电动机的转速。
9、4、动力电源:为多旋翼无人机提供能量,直接关系到无人机的悬停时长、最大负载重量和飞行距离等重要指标。通常采用化学电池来作为电动无人机的动力电源,综合重量、能量密度等原因,现用锂聚合物动力电池作为动力电源,锂聚合物的电池的标称电压是3.7v,满电电压是4.2v,储存电压是3.8v,放电后的保护电压为3.6v。
10、三、飞行控制系统:又称为飞行管理和控制系统,是无人机的大脑,是核心模块。它的工作流程是先接受收地面遥控器的指令,然后将这些指令分发到无人机上各个控制模块,再接受各个模块反馈回来的信息,最后将反馈信息传回到地面遥控器上,不断地重复这个流程保证无人机在空中完美地执行飞手的任务命令。一般会内置控制器、陀螺仪、加速度计和气压计等传感器,已实现无人机数据传输的可靠性和精确度。
11、控制无人机的方式有很多,最传统的就是遥控器了,此外地面站用的数传电台。另外还有不是特别主流的蓝牙、wifi、3g/4g等。无人机的遥控器一般成对出售,一个发射机,一个接收机,需配对使用,但不同厂家之间的设备可能不能通用,遥控器有美国手、日本手之说。美国手与日本手是指无人机的操控方式,美国手是左手油门,日本手是右手油门,对应不同的操控器油门方向杆的不同布局。中国手:也有人称作“反美国手”,因为其与“美国手”完全相反。几种操作方式只不过是不同人的习惯不同而已,并无优劣之分。
12、在地质灾害重建过程中,需要高空获取灾后地质面貌,于是会在无人机上设置摄像机和图传系统,进而方便建模进行灾后重建设计。
13、其中,无人机图传系统的视频压缩技术、信号处理技术、信道编码技术及调制解调技术,将无人机在空中拍摄的视频以无线的方式实时传送给地面遥控器显示端上。
14、但是现有的摄像机直接安装在无人机上,而且地质灾害面积比较大,现有的无人机拍摄范围有限,无法充分获取地质灾害前后方的景象,无法实现水平和竖直的灵活旋转,即使设计了云台,体积大,占用空间大制造成本高,而且旋转的稳定性不佳。
技术实现思路
1、为了解决上述问题,本实用新型提供了一种地质灾害重建用的自稳型无人机,能实现水平和竖直的灵活旋转,体积小,结构紧凑,旋转稳定性好。
2、为实现上述目的,本实用新型提供如下技术方案:一种地质灾害重建用的自稳型无人机,包括机身和安装机身上的四个螺旋桨、驱动4个螺旋桨旋转的第一电机、以及安装于机身上的摄像机,所述机身下方中间下方设有云台,云台连接摄像机,所述云台包括安装于机身下表面的顶板、可水平转动安装于顶板下方的旋转体、驱动旋转体旋转的第二电机、可上下翻转安装于旋转体前面的翻转体,可以驱动翻转体上下翻转的第三电机,所述摄像机安装于翻转体前面,所述顶板下方连接限位板,所述限位板套设于旋转体外围,所述顶板和限位板之间设有若干可沿着旋转体表面水平滚动的滚轮。使用时,第二电机驱动旋转体沿着顶板水平旋转,进而带动翻转体和摄像机水平旋转;第三电机带动翻转体和摄像机上下翻转,进而实现摄像机水平旋转和上下翻转,获取图像范围更广,而且所述旋转体能沿着限位板和滚轮旋转,提高了摄像机旋转的稳定性,其次,该设计结构简单、紧凑,制造成本低,容易实现。
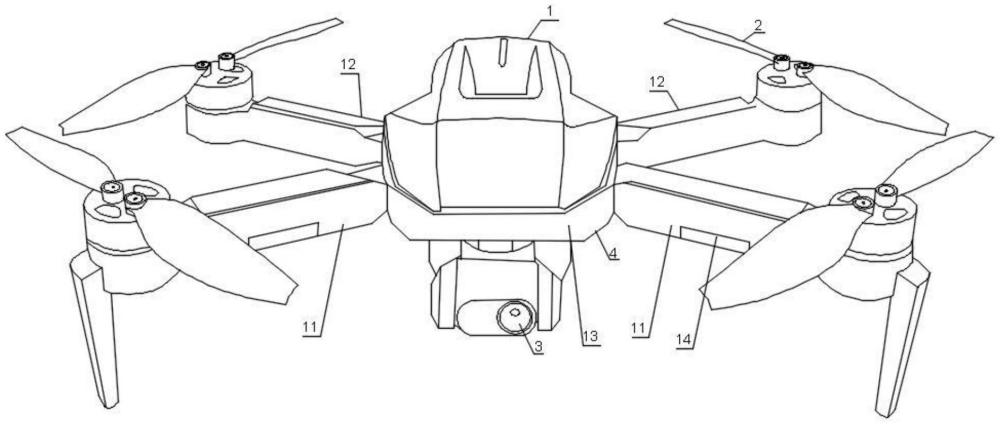
3、进一步地,所述机身前面设有第一灯体,所述机身前面两侧设有水平的前杆,所述机身后面两侧设有水平的后杆,所述其中两个螺旋桨设于两个前杆末端,另外两个螺旋桨设于两个后杆末端,所述两个前杆侧面设有第二灯体。所述第一灯体和第二灯体的设计,能够实现在黑夜起到警示作用,方便观察控制,避免撞到,提高使用安全性。
4、综上所述,本实用新型的有益效果:能实现摄像机的水平旋转和上下翻转,进而在出现倾斜时能够在竖直和水平方向上灵活调整,达到了自稳的效果,进而获取更大的摄影范围,而且所述云台设计结构简单、紧凑,制造成本低,旋转的稳定性好。
技术特征:
1.一种地质灾害重建用的自稳型无人机,包括机身(1)和安装机身(1)上的四个螺旋桨(2)、驱动4个螺旋桨(2)旋转的第一电机、以及安装于机身(1)上的摄像机(3),其特征在于:所述机身(1)下方中间下方设有云台(4),云台(4)连接摄像机(3),所述云台(4)包括安装于机身(1)下表面的顶板(41)、可水平转动安装于顶板(41)下方的旋转体(42)、驱动旋转体(42)旋转的第二电机、可上下翻转安装于旋转体(42)前面的翻转体(43),可以驱动翻转体(43)上下翻转的第三电机,所述摄像机(3)安装于翻转体(43)前面,所述顶板(41)下方连接限位板(44),所述限位板(44)套设于旋转体(42)外围,所述顶板(41)和限位板(44)之间设有若干可沿着旋转体(42)表面水平滚动的滚轮(45)。
2.根据权利要求1所述的地质灾害重建用的自稳型无人机,其特征在于:所述机身(1)前面设有第一灯体(13),所述机身(1)前面两侧设有水平的前杆(11),所述机身后面两侧设有水平的后杆(12),所述其中两个螺旋桨设于两个前杆(11)末端,另外两个螺旋桨设于两个后杆末端,所述两个前杆侧面设有第二灯体(14)。
技术总结
本技术涉及无人机领域,具体公开了一种地质灾害重建用的自稳型无人机,机身下方中间下方设有云台,云台连接摄像机,云台包括安装于机身下表面的顶板、可水平转动安装于顶板下方的旋转体、驱动旋转体旋转的第二电机、可上下翻转安装于旋转体前面的翻转体,可以驱动翻转体上下翻转的第三电机,摄像机安装于翻转体前面,顶板下方连接限位板,限位板套设于旋转体外围,顶板和限位板之间设有若干可沿着旋转体表面水平滚动的滚轮。能实现摄像机的水平旋转和上下翻转,进而获取更大的摄影范围,而且所述云台设计结构简单、紧凑,制造成本低,旋转的稳定性好。
技术研发人员:刘国卿,王新富,蒋葛会
受保护的技术使用者:浙江地博勘测设计有限公司
技术研发日:20230428
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!