一种用于鸟类仿生机器人的肩-翅膀关节机构
本申请涉及仿生机械设计,尤其涉及一种用于鸟类仿生机器人的肩-翅膀关节机构。
背景技术:
1、扑翼飞行是自然界中绝大多数生物的飞行方式,其与固定翼飞行与旋翼飞行相比,具备灵活、高效、隐蔽等优点。扑翼飞行运动不但将悬停、高速前进、飞行、后退、栖息、快速起飞集于一体,而且具有隐蔽性好、体积小、灵活、轻质等特点,可在复杂空间环境中飞行,不受地面地形环境的限制。能够完成传统飞行器所无法完成的工作。可以类似于昆虫实现超低空飞行,在复杂地形和狭窄空间中高效地执行特定任务,在军事侦查、危险探测、灾难搜救、电子干扰及反恐监视等军事和民用领域具有不可估量的应用潜力。
2、然而,鸟类在地面上时,其翅膀处于下垂收拢状态还能够拍打,比如:孔雀在地面开屏时,它的翅膀要在下垂收拢状态下进行拍打;鸟类在飞行时翅膀会从下垂收拢状态变换到水平展开状态并扑翼飞行。鸟类翅膀姿态变换和扑翼动作相当于肩-翅膀关节运动,而传统的对称曲柄摇杆扑翼机构仅模仿了飞鸟翅膀在展开状态下的扑翼动作,无法完成翅膀下垂收拢动作,且扑翼动作的灵活度较低,无法满足鸟类仿生机器人的实验要求。因此亟需开发一种用于鸟类仿生机器人的肩-翅膀关节机构来解决上述问题。
技术实现思路
1、本申请的主要目的在于提供一种用于鸟类仿生机器人的肩-翅膀关节机构,旨在解决现有的对称曲柄摇杆扑翼机构仅模仿了飞鸟翅膀在展开状态下的扑翼动作,无法完成翅膀下垂收拢动作,且扑翼动作的灵活度较低,无法满足鸟类仿生机器人的实验要求的问题。
2、为实现上述目的,本申请提供一种用于鸟类仿生机器人的肩-翅膀关节机构,包括:展翅机构、翅膀机构、扑翼机构,所述展翅机构、翅膀机构、扑翼机构均为左右对称结构,所述翅膀机构和扑翼机构安装在所述展翅机构上并以所述展翅机构的对称轴对称设置;所述翅膀机构与所述扑翼机构连接,所述扑翼机构与所述展翅机构连接。
3、可选地,所述展翅机构包括:第一驱动组件、机架、传动组件、连杆、摇杆、支撑杆、支撑板,所述第一驱动组件安装在所述机架上,所述传动组件与所述第一驱动组件连接,所述传动组件与所述连杆组件转动连接,所述连杆组件与所述摇杆转动连接,所述摇杆与所述支撑杆一端转动连接,所述支撑杆的另一端与所述支撑板连接,所述支撑板安装在所述机架上。
4、可选地,所述传动组件为齿轮,所述连杆与所述齿轮的非中心点转动连接。
5、可选地,所述齿轮有两个,两个齿轮相互啮合并分别与两侧对称设置的连杆转动连接。
6、可选地,所述第一驱动组件为电动机。
7、可选地,所述翅膀机构包括:翅膀主杆、翅膀移动杆、第一平行杆、中翅主杆、第二平行杆、中翅尾杆,所述翅膀主杆与所述扑翼机构转动连接;所述翅膀移动杆一端与所述扑翼机构转动连接,所述翅膀移动杆另一端与所述翅膀主杆转动连接;所述第一平行杆与所述翅膀主杆平行,所述第一平行杆的一端与所述翅膀移动杆转动连接,所述第一平行杆的另一端与所述第二平行杆转动连接;所述第二平行杆与所述翅膀移动杆平行,所述第二平行杆与所述翅膀主杆转动的连接;所述中翅主杆与所述第二平行杆平行,所述中翅主杆一端与所述翅膀主杆转动连接,所述中翅主杆的另一端与所述中翅尾杆转动连接;所述中翅尾杆与所述翅膀主杆平行,所述中翅尾杆与所述中翅主杆和所述第二平行杆转动连接。
8、可选地,所述扑翼机构包括:第二驱动组件、第一导向组件、导向槽、推板组件、动力块、导向销、连接块、固定块、第二导向组件,所述第一导向组件上开设有导向槽,所述第二驱动组件通过所述推杆与所述推板组件连接,所述动力块和固定块套设安装在所述第一导向组件上,所述动力块与所述第一导向组件滑动连接,所述固定块与所述第一导向组件固定连接,所述连接块与所述动力块连接,所述翅膀机构与所述连接块和固定块连接,所述推板组件与所述动力块连接,所述导向销安装在所述动力块内,所述导向销与所述导向槽相适配,所述第二导向组件与所述第一导向组件平行设置并与所述动力块滑动连接,所述第一导向组件与所述展翅机构连接。
9、可选地,所述导向槽呈螺旋状开设在所述第一导向组件的表面上。
10、可选地,所述第二驱动组件为直线电机。
11、可选地,所述中翅尾杆呈三叉状。
12、本申请实施例提出的一种用于鸟类仿生机器人的肩-翅膀关节机构,通过展翅机构、翅膀机构、扑翼机构的共同协作,使扑翼动作更加稳定,得到更加灵活的鸟类仿生机器人扑翼机构。
技术特征:
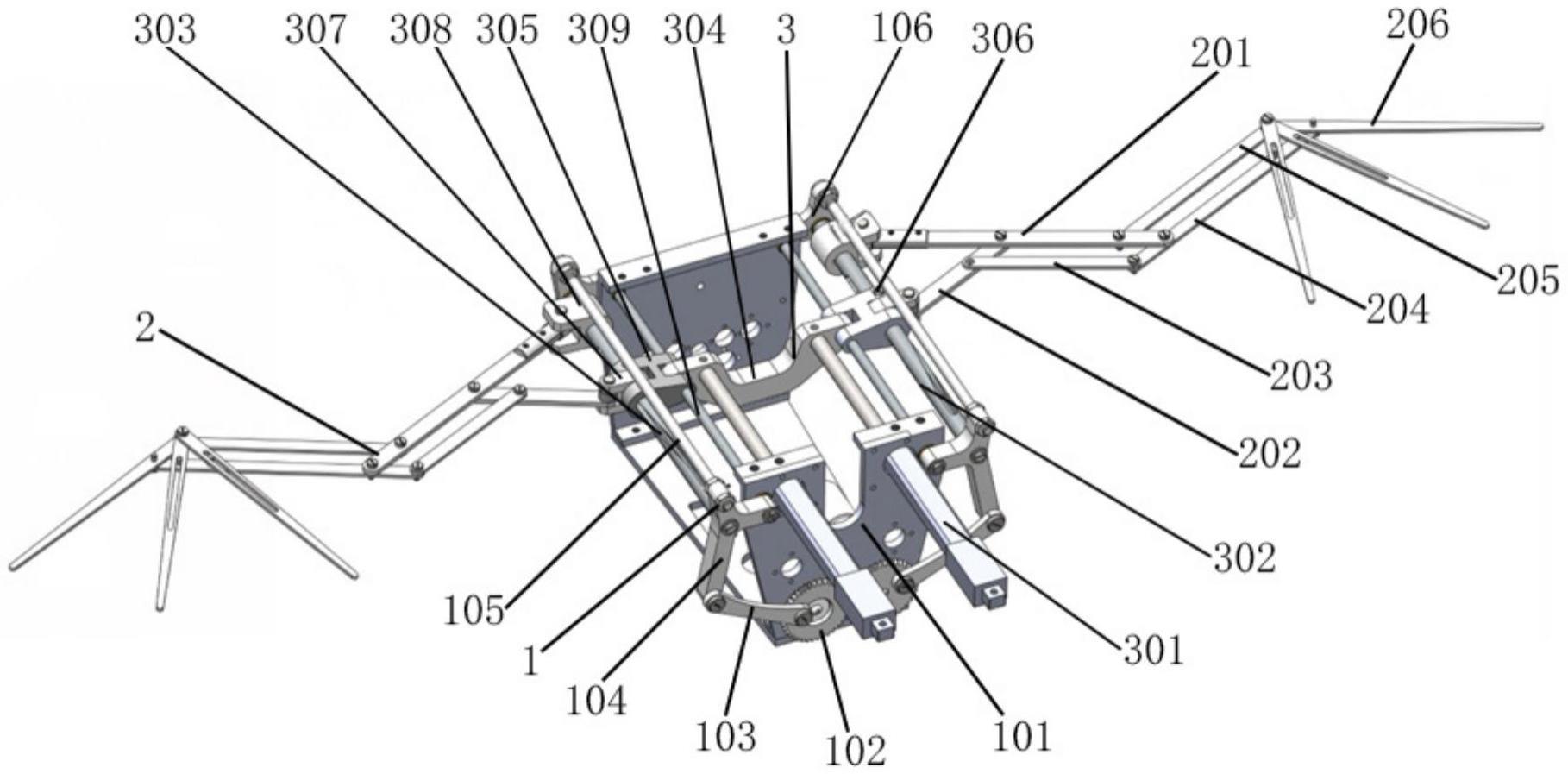
1.一种用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,包括:展翅机构(1)、翅膀机构(2)、扑翼机构(3),所述展翅机构(1)、翅膀机构(2)、扑翼机构(3)均为左右对称结构,所述翅膀机构(2)和扑翼机构(3)安装在所述展翅机构(1)上并以所述展翅机构(1)的对称轴对称设置;所述翅膀机构(2)与所述扑翼机构(3)连接,所述扑翼机构(3)与所述展翅机构(1)连接。
2.如权利要求1所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述展翅机构(1)包括:第一驱动组件、机架(101)、传动组件(102)、连杆(103)、摇杆(104)、支撑杆(105)、支撑板(106),所述第一驱动组件安装在所述机架(101)上,所述传动组件(102)与所述第一驱动组件连接,所述传动组件(102)与所述连杆(103)转动连接,所述连杆(103)与所述摇杆(104)转动连接,所述摇杆(104)与所述支撑杆(105)一端转动连接,所述支撑杆(105)的另一端与所述支撑板(106)连接,所述支撑板(106)安装在所述机架(101)上。
3.如权利要求2所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述传动组件(102)为齿轮,所述连杆(103)与所述齿轮的非中心点转动连接。
4.如权利要求3所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述齿轮有两个,两个齿轮相互啮合并分别与两侧对称设置的连杆(103)转动连接。
5.如权利要求2所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述第一驱动组件为电动机。
6.如权利要求1所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述翅膀机构(2)包括:翅膀主杆(201)、翅膀移动杆(202)、第一平行杆(203)、中翅主杆(204)、第二平行杆(205)、中翅尾杆(206),所述翅膀主杆(201)与所述扑翼机构(3)转动连接;所述翅膀移动杆(202)一端与所述扑翼机构(3)转动连接,所述翅膀移动杆(202)另一端与所述翅膀主杆(201)转动连接;所述第一平行杆(203)与所述翅膀主杆(201)平行,所述第一平行杆(203)的一端与所述翅膀移动杆(202)转动连接,所述第一平行杆(203)的另一端与所述第二平行杆(205)转动连接;所述第二平行杆(205)与所述翅膀移动杆(202)平行,所述第二平行杆(205)与所述翅膀主杆(201)转动的连接;所述中翅主杆(204)与所述第二平行杆(205)平行,所述中翅主杆(204)一端与所述翅膀主杆(201)转动连接,所述中翅主杆(204)的另一端与所述中翅尾杆(206)转动连接;所述中翅尾杆(206)与所述翅膀主杆(201)平行,所述中翅尾杆(206)与所述中翅主杆(204)和所述第二平行杆(205)转动连接。
7.如权利要求1所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述扑翼机构包括:第二驱动组件(301)、第一导向组件(302)、导向槽(303)、推板组件(304)、动力块(305)、导向销(306)、连接块(307)、固定块(308)、第二导向组件(309)、推杆,所述第一导向组件(302)上开设有导向槽(303),所述第二驱动组件(301)通过所述推杆与所述推板组件(304)连接,所述动力块(305)和固定块(308)套设安装在所述第一导向组件(302)上,所述动力块(305)与所述第一导向组件(302)滑动连接,所述固定块(308)与所述第一导向组件(302)固定连接,所述连接块(307)与所述动力块(305)连接,所述翅膀机构(2)与所述连接块(307)和固定块(308)连接,所述推板组件(304)与所述动力块(305)连接,所述导向销(306)安装在所述动力块(305)内,所述导向销(306)与所述导向槽(303)相适配,所述第二导向组件(309)与所述第一导向组件(302)平行设置并与所述动力块(305)滑动连接,所述第一导向组件(302)与所述展翅机构(1)连接。
8.如权利要求7所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述导向槽(303)呈螺旋状开设在所述第一导向组件(302)的表面上。
9.如权利要求7所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述第二驱动组件(301)为直线电机。
10.如权利要求6所述的用于鸟类仿生机器人的肩-翅膀关节机构,其特征在于,所述中翅尾杆(206)呈三叉状。
技术总结
本申请公开了一种用于鸟类仿生机器人的肩‑翅膀关节机构,包括:展翅机构、翅膀机构、扑翼机构,所述展翅机构、翅膀机构、扑翼机构均为左右对称结构,所述翅膀机构和扑翼机构安装在所述展翅机构上并以所述展翅机构的对称轴对称设置;所述翅膀机构与所述扑翼机构连接,所述扑翼机构与所述展翅机构连接。本申请通过展翅机构、翅膀机构、扑翼机构的共同协作,使扑翼动作更加稳定,得到更加灵活的鸟类仿生机器人扑翼机构。
技术研发人员:杨雨婷,王会中,王月坤,李海燕,王杰,罗耀烨
受保护的技术使用者:四川工程职业技术学院
技术研发日:20230608
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!