一种基于RTK精准定位的实时图像采集巡检装置的制作方法
本技术涉及实时图像采集巡检装置,具体为一种基于rtk精准定位的实时图像采集巡检装置。
背景技术:
1、rtk载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标,这是一种新的常用的卫星定位测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而rtk是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是gps应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新的测量原理和方法,极大地提高了作业效率。
2、随着现在测绘技术的发展,已有逐渐取代人工测绘的趋势,目前市面上开发了一款基于rtk定位技术的图像采集巡检装置,而针对于基于rtk定位技术的图像采集巡检装置来说,不便于技术人员对搭载在无人机上的rtk测量仪进行快速拆装操作,同时也达不到有效保障无人机的平稳降落效果,造成降落状态下无人机上的rtk测量仪出现触地碰撞故障,给技术人员带来麻烦。
技术实现思路
1、本实用新型的目的在于提供一种基于rtk精准定位的实时图像采集巡检装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
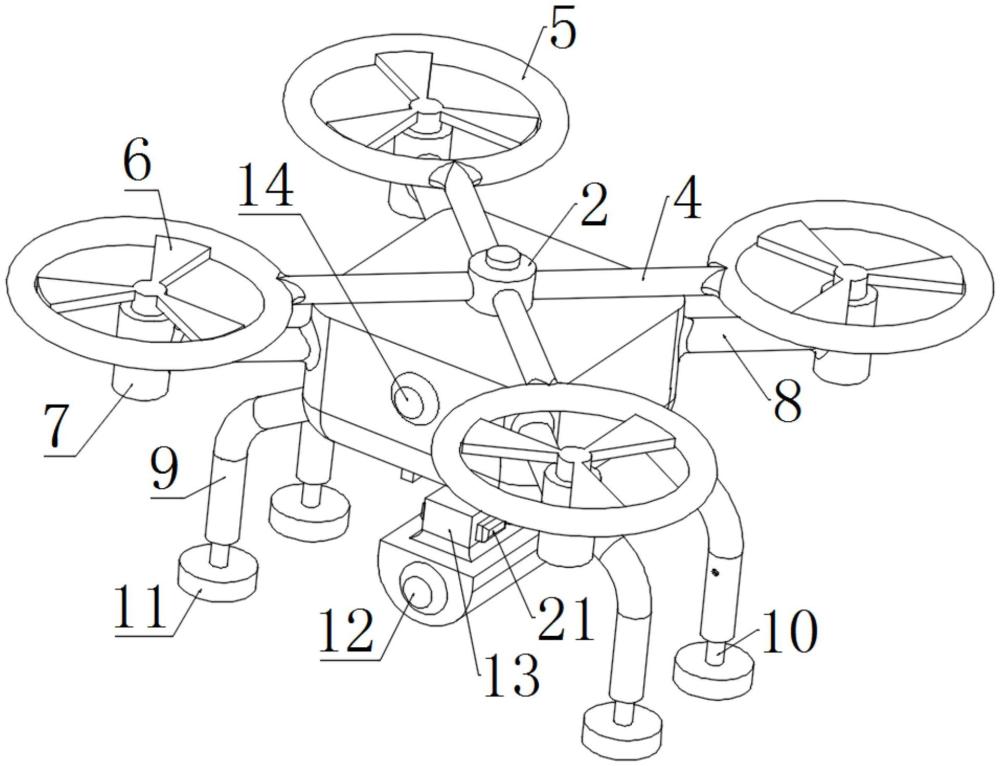
3、一种基于rtk精准定位的实时图像采集巡检装置,包括无人机本体,所述无人机本体上端面插接连接有固定块,所述固定块上端面内部滑动连接有螺栓,且螺栓螺纹连接无人机本体,所述无人机本体外部均匀固定连接有固定柱,所述固定柱远离无人机本体一端固定连接有驱动电机,所述驱动电机通过输出轴固定连接有叶片,所述无人机本体下端面设置有滑槽,所述无人机本体左右端面均固定连接有固定架,所述固定架下端面内部设置有缓冲机构。
4、更进一步的,所述滑槽内腔通过轴承转动连接有双向螺纹杆,所述双向螺纹杆外部螺纹连接有滑块,所述滑块下端面固定连接有夹块,所述夹块相互靠近面均匀设置有卡槽,所述双向螺纹杆右端面固定连接有旋钮。
5、更进一步的,所述卡槽内腔滑动连接有卡块,所述卡块相互靠近面固定连接有安装块,所述安装块下端面固定连接有rtk测量仪。
6、更进一步的,所述rtk测量仪上端面设置有插孔,所述无人机本体下端面固定连接有插柱,所述插柱插接连接插孔内腔,所述无人机本体前端面设置有巡航摄像头。
7、更进一步的,所述缓冲机构包括有收纳槽、进出气孔、弹簧、活塞与滑柱,所述固定架下端面内部设置有收纳槽,所述收纳槽内腔底部固定连接有弹簧,所述固定架外部设置有进出气孔。
8、更进一步的,所述弹簧远离收纳槽内腔底部一端固定连接有活塞,所述活塞远离弹簧一端固定连接有滑柱,所述滑柱下端面固定连接有吸盘。
9、更进一步的,所述固定块外部均匀固定连接有支撑杆,所述支撑杆远离固定块一端固定连接有防护架,所述防护架安装在叶片外部。
10、与现有技术相比,本实用新型的有益效果是:
11、1.本实用新型中,通过人员握住rtk测量仪将安装块贴合无人机本体下端,并使安装块利用插孔与无人机本体下端的插柱插接连接,同时在握住旋钮转动双向螺纹杆螺纹传动滑块,并使滑块滑动连接在滑槽内腔中带动夹块相互靠近,从而使夹块利用卡槽滑入卡块外部对安装块进行夹持固定,然后对rtk测量仪进行安装固定,并且人员再通过将固定块与无人机本体进行插接安装,然后利用螺栓与无人机本体进行螺纹连接对固定块进行固定,从而使固定块带动支撑杆与防护架滑动连接在叶片外部,然后利用防护架对叶片进行防护,进而提高实时图像采集巡检装置的安全性与实用性。
12、2.本实用新型中,在实时图像采集巡检装置巡检完成返航落地时,通过利用吸盘与地面进行吸附,进而提高无人机本体返航落地时的稳定性,而在无人机本体落地后,吸盘与地面吸附固定后,利用吸盘推动滑柱带动活塞滑动连接在收纳槽内腔中,并使活塞挤压收纳槽内腔中的弹簧,同时挤压收纳槽内腔中的空气通过进出气孔进行排出,而在弹簧回弹推动活塞复位时,使活塞通过进出气孔抽动外部空气进入收纳槽内腔中,而空气通过进出气孔进气的效率过低,进而限制弹簧回弹推动活塞复位的速度,从而实现减震缓冲效果,避免无人机本体返航落地后因震动导致吸盘脱离地面翻到的情况。
技术特征:
1.一种基于rtk精准定位的实时图像采集巡检装置,包括无人机本体(1),其特征在于:所述无人机本体(1)上端面插接连接有固定块(2),所述固定块(2)上端面内部滑动连接有螺栓(3),且螺栓(3)螺纹连接无人机本体(1),所述无人机本体(1)外部均匀固定连接有固定柱(8),所述固定柱(8)远离无人机本体(1)一端固定连接有驱动电机(7),所述驱动电机(7)通过输出轴固定连接有叶片(6),所述无人机本体(1)下端面设置有滑槽(23),所述无人机本体(1)左右端面均固定连接有固定架(9),所述固定架(9)下端面内部设置有缓冲机构(10)。
2.根据权利要求1所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述滑槽(23)内腔通过轴承转动连接有双向螺纹杆(17),所述双向螺纹杆(17)外部螺纹连接有滑块(18),所述滑块(18)下端面固定连接有夹块(19),所述夹块(19)相互靠近面均匀设置有卡槽(22),所述双向螺纹杆(17)右端面固定连接有旋钮(20)。
3.根据权利要求2所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述卡槽(22)内腔滑动连接有卡块(21),所述卡块(21)相互靠近面固定连接有安装块(13),所述安装块(13)下端面固定连接有rtk测量仪(12)。
4.根据权利要求3所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述rtk测量仪(12)上端面设置有插孔(15),所述无人机本体(1)下端面固定连接有插柱(16),所述插柱(16)插接连接插孔(15)内腔,所述无人机本体(1)前端面设置有巡航摄像头(14)。
5.根据权利要求1所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述缓冲机构(10)包括有收纳槽(101)、进出气孔(102)、弹簧(103)、活塞(104)与滑柱(105),所述固定架(9)下端面内部设置有收纳槽(101),所述收纳槽(101)内腔底部固定连接有弹簧(103),所述固定架(9)外部设置有进出气孔(102)。
6.根据权利要求5所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述弹簧(103)远离收纳槽(101)内腔底部一端固定连接有活塞(104),所述活塞(104)远离弹簧(103)一端固定连接有滑柱(105),所述滑柱(105)下端面固定连接有吸盘(11)。
7.根据权利要求1所述的一种基于rtk精准定位的实时图像采集巡检装置,其特征在于:所述固定块(2)外部均匀固定连接有支撑杆(4),所述支撑杆(4)远离固定块(2)一端固定连接有防护架(5),所述防护架(5)安装在叶片(6)外部。
技术总结
本技术涉及实时图像采集巡检装置技术领域,尤其为一种基于RTK精准定位的实时图像采集巡检装置,包括无人机本体,所述无人机本体上端面插接连接有固定块,所述固定块上端面内部滑动连接有螺栓,且螺栓螺纹连接无人机本体,所述无人机本体外部均匀固定连接有固定柱,所述固定柱远离无人机本体一端固定连接有驱动电机,所述驱动电机通过输出轴固定连接有叶片,所述无人机本体下端面设置有滑槽,所述无人机本体左右端面均固定连接有固定架,所述固定架下端面内部设置有缓冲机构;本技术实现了可以搭载无人机进行使用,无人机返航落地时的减震缓冲效果,避免无人机本体返航落地后因震动导致吸盘脱离地面翻到的情况。
技术研发人员:田柏栋,李四化,黄一河,张文瑞
受保护的技术使用者:西安地籍不动产勘察测绘有限责任公司
技术研发日:20230816
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!