一种矢量多旋翼无人机结构
本技术涉及旋翼无人机,具体涉及一种矢量多旋翼无人机结构。
背景技术:
1、多轴飞行器(multirotor aircraft),是一种具有超过两个旋翼轴的旋翼航空器。由每个轴末端的电动机转动,带动旋翼从而产生上升动力。旋翼的角度固定而不像直升飞机那样可变。透过改变不同旋翼之间的相对速度可以改变推进力的扭矩,从而控制飞行器的运行轨迹。
2、四旋翼飞行器(quadrotor aircraft)是用四个旋翼产生升力的多轴飞行器。和固定翼飞机不同,它通过旋翼提供的推力使飞机垂直起降、悬停、进行各种飞行。它的四个旋翼大小相同,分布位置接近对称,其中两个旋翼与另两个转动方向相反。通过调整不同旋翼之间的相对速度来调节不同位置的推力,并克服每个旋翼之间的反扭力矩,就可以控制飞机维持姿态、或完成平飞、转向、翻滚、倒飞和侧飞等各种机动飞行。存在的缺点是由于只有四个旋翼,无人机的推力较小,载重比较小;旋翼角度是固定的,必须通过改变电机的转速来调整角度、速度,因此不能在空中指定位置随意改变姿态,不易避障。
3、六旋翼无人机是一种多轴飞行器,利用六个旋翼产生升力和推力来实现飞行。与四旋翼无人机相比,六旋翼无人机具有更高的稳定性和负载能力。六旋翼无人机的旋翼布局包括六个旋翼,大小相同,并呈六边形或类似形状的分布。其中相邻的旋翼旋转方向相反,以平衡反扭力矩。通过调节不同旋翼之间的相对速度,可以调节不同位置的推力,从而控制无人机的姿态和飞行。六旋翼无人机的稳定性和抗风等性能均要优于同等配置的4轴无人机,更适合进行农业、应急、城市通勤、军事和货物运输等场景的运用。存在的缺点是六旋翼飞行器的旋翼角度是固定的,必须通过改变电机的转速来调整角度、速度。不能在空中指定位置随意改变姿态,不易避障,机动性不足;六旋翼无人机的体积较大,无法在较为狭小的地方作业。
技术实现思路
1、针对上述问题,本实用新型提供一种矢量多旋翼无人机结构。
2、本实用新型采用下述的技术方案:
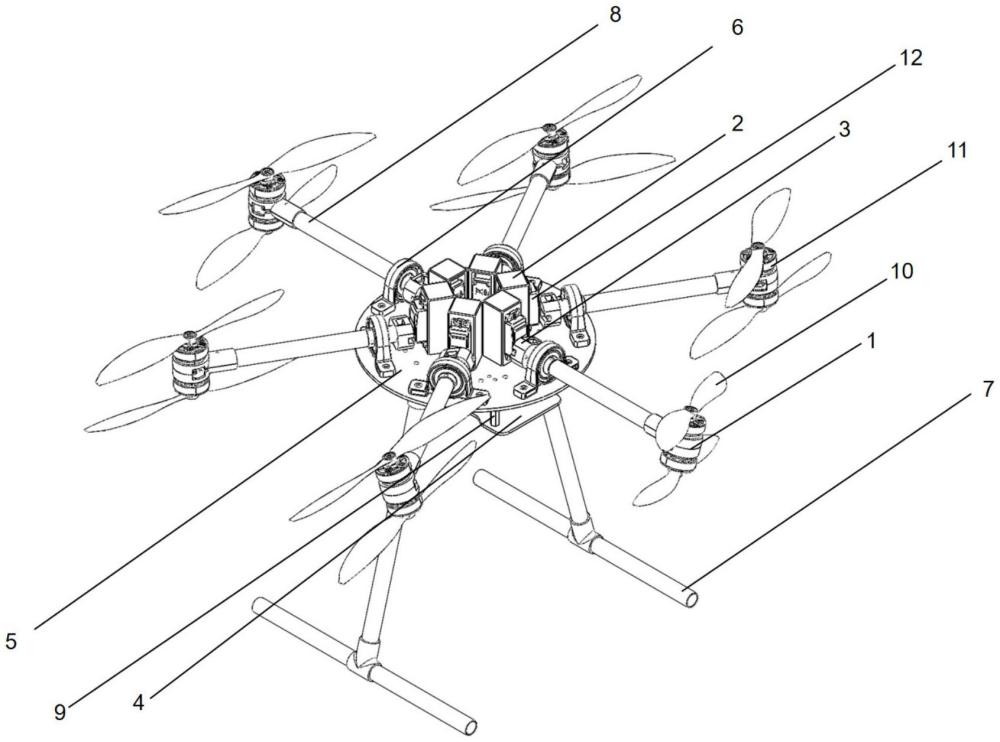
3、一种矢量多旋翼无人机结构,包括:主底板,主底板上设置6个舵机支架;每个舵机支架均固定连接舵机;每个舵机均通过轴承连接机臂;每个机臂端部固定连接两个电机,每个电机均连接螺旋桨;主底板连接副底板,所述副底板固定连接电池;主底板下部还连接有脚架。优选的,所述螺旋桨为螺旋正桨和螺旋反桨,相邻机臂螺旋桨设置方式相反。
4、优选的,所述螺旋桨直径为10寸。
5、优选的,所述主底板通过支撑立柱连接副底板。
6、优选的,所述支撑立柱的个数是4个。
7、优选的,所述电池为6s电池。
8、优选的,所述舵机通过第二连接件连接机臂。
9、优选的,所述机臂端部通过第一连接件固定连接两个电机。
10、本实用新型的有益效果是:
11、本实用新型提供一种矢量多旋翼无人机结构,不同于传统六旋翼无人机固定的机臂,该无人机的机臂可以倾转,从而带动旋翼倾转,由于旋翼可以倾转,改进了传统四、六旋翼无人机只能通过改变电机的转速来调整方向和速度的问题,实现无人机的高效全向飞行,并能在空中指定位置随意改变姿态,这为避障提供了更加简便的思路。
12、同时由于共轴双桨的旋翼结构,便利地平衡反作用力矩,使得无人机更稳定,共轴双桨的结构也提高了无人机的推力,为更多丰富的动作提供动力支持。
技术特征:
1.一种矢量多旋翼无人机结构,其特征在于,包括:主底板,主底板上设置6个舵机支架;每个舵机支架均固定连接舵机;每个舵机均通过轴承连接机臂;每个机臂端部固定连接两个电机,每个电机均连接螺旋桨;主底板连接副底板,所述副底板固定连接电池;主底板下部还连接有脚架。
2.根据权利要求1所述一种矢量多旋翼无人机结构,其特征在于,所述螺旋桨为螺旋正桨和螺旋反桨,相邻机臂螺旋桨设置方式相反。
3.根据权利要求2所述一种矢量多旋翼无人机结构,其特征在于,所述螺旋桨直径为10寸。
4.根据权利要求1所述一种矢量多旋翼无人机结构,其特征在于,所述主底板通过支撑立柱连接副底板。
5.根据权利要求4所述一种矢量多旋翼无人机结构,其特征在于,所述支撑立柱的个数是4个。
6.根据权利要求1所述一种矢量多旋翼无人机结构,其特征在于,所述电池为6s电池。
7.根据权利要求1所述一种矢量多旋翼无人机结构,其特征在于,所述舵机通过第二连接件连接机臂。
8.根据权利要求1所述一种矢量多旋翼无人机结构,其特征在于,所述机臂端部通过第一连接件固定连接两个电机。
技术总结
本技术公开了一种矢量多旋翼无人机结构,包括:主底板,主底板上设置6个舵机支架,每个舵机支架均固定连接舵机,每个舵机均通过轴承连接机臂,每个机臂端部固定连接两个电机,每个电机均连接螺旋桨;主底板连接副底板,所述副底板固定连接电池;主底板下部还连接有脚架。本技术提供一种矢量多旋翼无人机结构,不同于传统六旋翼无人机固定的机臂,该无人机的机臂可以倾转,从而带动旋翼倾转,实现无人机的高效全向飞行。同时由于共轴双桨的旋翼结构,便利地平衡反作用力矩,使得无人机更稳定,共轴双桨的结构也提高了无人机的推力,为更多丰富的动作提供动力支持。
技术研发人员:李旺,朴泓瑜,陆奇,程祺,张浩哲,卢成桐,夏明凯,汪政位
受保护的技术使用者:四川大学
技术研发日:20230912
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!