一种无人机货舱空投系统及空投方法与流程
本发明涉及无人机空投,具体而言,涉及一种无人机货舱空投系统及空投方法。
背景技术:
1、近年来,利用无人机进行物资空投在军事行动、后勤物资补给和抢险救灾中日益增多,空投物资是利用航空器运载物资,当物资达到指定地点后,利用各种缓降技术,使得物资能够安全着陆。
2、现有技术中一种空投物资的方式是利用无人直升机空投物资,采用缓降绳空投或直接空投,但直升机悬停空投效率较低,只能单件单次空投,费时费力,且空投物资重量小,物资容积小,不能满足短时、快速、大批量空投物资的需求;另一种空投物资的方式是将现有固定翼有人机改成无人机,虽然提高了物资容积和空投重量,但在改装过程中会受到原有机型的影响,大部分飞机只能从侧舱门空投物资,这种空投方式需要增加一套自动化程度较高的机电系统,重量代价较大,同时,侧舱门空投物资由于本身结构限制,还存在空投时间长,散布范围大等缺点,不能满足军事补给散布范围小、空投适应性强等需求。
3、在军事补给后勤物资和作战物资运用领域,利用大型运输机进行物资空投,飞行员生存存在一定的风险,同时大型运输机对于需求少量物资投送时,经济性较低。
技术实现思路
1、本发明旨在提供一种无人机货舱空投系统及空投方法,以解决现有技术中无人机空投物资效率低、空投物资重量小、体积小,不能满足短时、快速、大批量空投物资的需求的问题。
2、本发明是采用以下的技术方案实现的:
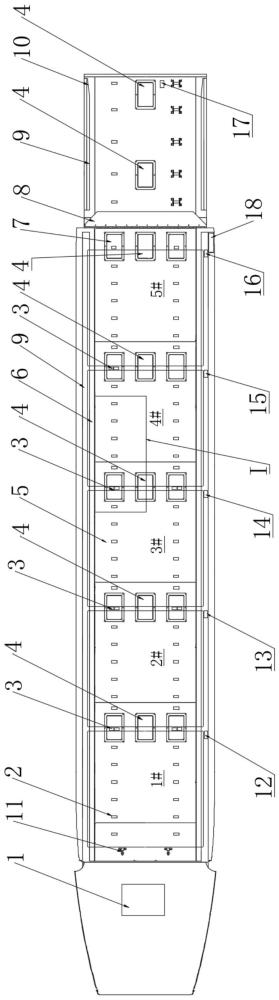
3、本发明提供一种无人机货舱空投系统,包括安装在货舱地板上以及货桥上的传输滚轮装置和滚棒组件,所述传输滚轮装置用于实现自动装卸集装货台,所述货舱内具有多个存放区,所述存放区用于存放集装货台,每个所述存放区的航前和航后两侧均设置有限位装置;
4、所述货舱内以及所述货桥上还安装有两列侧导轨,其分别位于集装货台的左右两侧;
5、还包括开伞装置,所述开伞装置安装在所述货舱内,并位于集装货台的上方,集装货台上的货物连接有伞包系统,所述伞包系统连接至所述开伞装置,集装货台在空中离开所述货舱后,所述开伞装置能够将所述伞包系统打开并与之分离,从而将集装货台与货物空投至目标地点。
6、作为优选的技术方案:
7、所述货舱地板以及货桥上安装有两列所述滚棒组件。
8、作为优选的技术方案:
9、所述滚棒组件包括滚棒支架、滚棒以及轴,所述滚棒支架安装在所述货舱地板上,所述滚棒安装在所述轴上,二者之间设置有轴承,所述轴的两端安装在所述滚棒支架上。
10、作为优选的技术方案:
11、所述轴承的外侧安装有卡簧。
12、作为优选的技术方案:
13、所述滚棒支架上设置有滚棒支架安装接口,通过在所述滚棒支架安装接口内安装螺钉或螺栓将其与货舱地板进行连接。
14、作为优选的技术方案:
15、所述滚棒组件采用下沉式的方式安装在所述货舱地板上,所述滚棒的顶面高于所述货舱地板。
16、作为优选的技术方案:
17、所述侧导轨为沿无人机航向方向通长布置的条形轨道,所述侧导轨安装于机身纵梁上。
18、作为优选的技术方案:
19、所述侧导轨的底部设置两排安装孔位,通过螺钉将其固定安装在所述机身纵梁上。
20、作为优选的技术方案:
21、所述侧导轨上沿其长度方向间隔设置有多个侧面滚轮,所述侧面滚轮用于与集装货台的侧面滚动接触。
22、作为优选的技术方案:
23、所述侧面滚轮的轴向沿竖直方向,所述侧面滚轮通过螺钉安装在所述侧导轨上的空腔中。
24、作为优选的技术方案:
25、所述货舱内的侧导轨的上端还设有翻边,所述翻边位于集装货台侧部的上方,用于对集装货台垂直限位。
26、作为优选的技术方案:
27、所述侧导轨上还设置有系留环,所述系留环安装在所述侧导轨的顶部。
28、作为优选的技术方案:
29、所述侧导轨上安装有阻拦装置,所述阻拦装置位于所述货舱内部的前端,所述阻拦装置用于防止货物向前倾倒。
30、作为优选的技术方案:
31、所述阻拦装置包括分别连接在两列所述侧导轨上的竖杆,所述竖杆之间通过横杆相连,所述竖杆与所述侧导轨之间连接有斜撑。
32、作为优选的技术方案:
33、所述限位装置包括前向限动件,所述前向限动件固定安装在货舱地板的前端,所述前向限动件用于对所述货舱内最前端的集装货台进行限位;
34、所述限位装置还包括双向限动锁,所述双向限动锁安装在相邻两个所述存放区之间,所述双向限动锁用于对集装货台双向限位;
35、所述限位装置还包括后向限动锁,所述后向限动锁安装在所述货舱的出口处,所述后向限动锁用于对集装货台单向限位。
36、作为优选的技术方案:
37、所述双向限动锁和所述后向限动锁闭锁时能够对集装货台进行限位,所述双向限动锁开锁时能够避免影响集装货台通过。
38、作为优选的技术方案:
39、所述双向限动锁包括壳体及壳体盖,所述壳体内部具有收容空间,所述壳体内安装有航前限动机构和航后限动机构,所述航前限动机构和所述航后限动机构并列安装在所述壳体内;
40、所述壳体上还安装有电控盒,所述电控盒用于控制所述航前限动机构和所述航后限动机构。
41、作为优选的技术方案:
42、所述后向限动锁的结构基本与所述双向限动锁的结构相同,区别在于所述后向限动锁不设置所述航前限动机构。
43、作为优选的技术方案:
44、所述货舱地板上开设有多个凹腔,所述凹腔内安装有口盖,所述双向限动锁、所述后向限动锁以及所述传输滚轮装置安装在对应的口盖中。
45、作为优选的技术方案:
46、所述货舱地板上以及所述货桥上安装有位置传感器,用于感知集装货台的位置。
47、作为优选的技术方案:
48、所述开伞装置包括航后安装件、张紧组件、阻挡件、开伞拉环、航前安装件和钢索,所述航前安装件和所述航后安装件分别固定安装在所述货舱的前端和后端端框上方,所述航前安装件和所述航后安装件之间连接有所述张紧组件和所述钢索,所述张紧组件用于张紧所述钢索,所述阻挡件安装在所述张紧组件和所述钢索之间,所述开伞拉环悬挂在所述钢索上。
49、作为优选的技术方案:
50、所述伞包系统包括开伞绳、自动开伞器、引导伞和主伞,所述开伞拉环通过所述开伞绳连接所述引导伞,所述引导伞连接主伞封口绳,所述引导伞与所述主伞封口绳之间设置所述自动开伞器。
51、作为优选的技术方案:
52、所述无人机货舱空投系统还包括安装在无人机上的空投系统控制器,所述空投系统控制器与所述双向限动锁、所述后向限动锁、所述传输滚轮装置连接,所述空投系统控制器与飞管计算机系统采用无线通信进行交互,所述飞管计算机系统向所述空投系统控制器下发指令,控制其进行空投操作。
53、作为优选的技术方案:
54、所述无人机货舱空投系统还包括安装在无人机上的操作面板,所述操作面板连接至所述空投系统控制器,通过操作所述操作面板下达指令给所述空投系统控制器,完成集装货台的装卸。
55、本发明进一步提供一种空投方法,其利用上述无人机货舱空投系统进行空投,包括以下步骤:
56、s1:无人机达到预定位,飞机达到预定仰角,货桥水平开启,上尾舱门开启;
57、s2:飞管计算机系统发送开锁指令给空投系统控制器,空投系统控制器控制所有限动锁开锁;
58、s3:在货物重力的作用下,多个集装货台依次沿着逆航向移动,悬挂在钢索上的开伞拉环沿着钢索滑动;
59、s4:直到集装货台移动到货桥末端时,集装货台脱离无人机,开伞拉环移动到阻挡件附近,开伞绳载荷增大,开伞绳拉出引导伞,同时,开伞绳断裂,引导伞快速充气涨满;
60、s5:引导伞将主伞拉出,主伞快速充气涨满,集装货台在空中慢慢降落,直到集装货台落地,实现空投。
61、综上所述,由于采用了上述技术方案,本发明的有益效果是:
62、1、本发明的无人机货舱空投系统装卸周期短、自动化程度高、装卸效率高;
63、2、本发明的无人机货舱空投系统运用到无人机系统具有较高的经济效益;
64、3、本发明的无人机货舱空投系统地板上布置的装置具有互换性,便于维护检修;
65、4、本发明的无人机货舱空投系统侧导轨、滚棒具有较高承载能力,重量轻;
66、5、本发明的无人机货舱空投系统设置拦阻装置,提高系统安全性;
67、6、本发明的的开伞系统设置自动开伞器,提高开伞成功率;
68、7、本发明的无人机货舱装载系统可以实现多件货物连续投、且散布范围小和空投时间短,满足短时、快速、大批量空投物资的需求。
- 还没有人留言评论。精彩留言会获得点赞!