一种适用于山地蕉园的无人机吊运装备
本发明涉及农业机具,具体涉及一种适用于山地蕉园的无人机吊运装备。
背景技术:
1、山地,一般指海拔在500米以上,起伏较大的地貌。受到地理条件的制约,通常在山地上种植大面积粮食与水果作物。例如在山地上种植香蕉,山地蕉园地形复杂,山路曲折,垂直高度落差较大,农用物资运送和果品转运往往需要耗费大量的人力物力;适用于平原区域的运送机械在山区环境难以发挥作用,是山地蕉园实际生产中存在的一大问题。
2、目前,山地蕉园主要的运输方式有人工背运、拖车运输、轨道运输以及索道运输;但这几种运输方式均存在不少缺陷与不足:
3、1、人工背运需要耗费大量的劳动力,运输效率低下且容易损伤果实,在劳动力成本越来越高的今天,单纯的人工背运已经难以满足运输需求。
4、2、拖车运输通常采用轮式运输车进行运输,轮式运输车存在通过性差,运行速度慢,对驾驶员专业要求较高等问题,且在运输过程中容易因颠簸对果品造成机械损伤,影响果实品质。
5、3、轨道运输通常采用轨道运输机,轨道运输需要在山地蕉园中布设大量的轨道,索道运输也需要在山地蕉园中布设大量的索道,两者运输方式造价和后期维护成本高,一般农户难以承担。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种适用于山地蕉园的无人机吊运装备,该无人机吊运装备具有较高的运送效率,对地形环境具有更好的适应性,采用吊挂的方式进行运送能有效减少果实因接触碰撞产生的机械损伤,且成本投入更低,具有更高的经济效益。
2、本发明的目的通过以下技术方案实现:
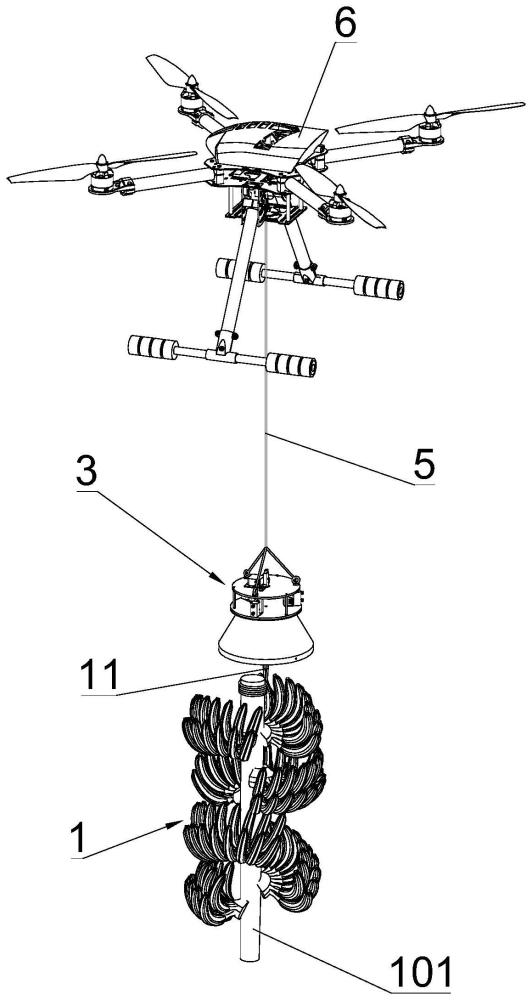
3、一种适用于山地蕉园的无人机吊运装备,包括用于连接在香蕉果串的果轴上的吊具以及用于吊起吊具以吊运香蕉果串的吊运装置,所述吊运装置通过缆绳与无人机连接,其中,所述吊运装置包括吊运架、设置在所述吊运架上的自主抓取机构、导向机构以及自主脱钩机构;其中,
4、所述自主抓取机构包括设置在所述吊运架上且沿着圆周方向分布的多组挂钩组件以及用于驱动所述吊具落入挂钩组件中的抓取驱动机构;所述吊运装置在下放的过程中,所述导向机构用于与吊具接触并将吊具引导至挂钩组件的位置;所述自主脱钩机构用于驱动所述挂钩组件运动从而将挂钩组件与吊具分离。
5、上述适用于山地蕉园的无人机吊运装备的工作原理是:
6、由于香蕉的品种不同,香蕉果串的果轴形态存在差异,无人机吊运装备直接抓取果轴进行吊运的难度较大,本发明通过设置吊具,香蕉采收时,工人将采收后的香蕉果串竖直放置于地上,在果轴处绑上麻绳,并将麻绳一端绑在吊具上,同时将吊具插在果轴的顶部,此时香蕉果串与吊具相连,吊运时,无人机吊运装备只需抓取并吊起吊具即可同时吊起香蕉果串进行运送,具体地,吊运装置在无人机的带动下,靠近吊具的位置,吊运装置在下放过程中,导向机构会引导挂钩组件逐渐靠近吊具,直到吊具位于多组挂钩组件的中间,在抓取驱动机构的驱动下,吊具与挂钩组件相互靠近运动,并在吊运装置自身的重力下,吊具将多组挂钩组件撑开,而多组挂钩组件撑开后会复位,吊运装置在无人机的牵引下上升,上升的过程中,多组挂钩组件后会将吊具钩住,完成挂钩,无人机通过吊运装置吊起香蕉果串进行运送;香蕉果串被吊运至山下的集中放置点后需要进行脱钩,卸下香蕉果串,脱钩的过程为:当香蕉果串运送到指定位置时,自主脱钩机构驱动挂钩组件运动,挂钩组件与吊具分离,无人机牵引吊运装置上升,直到吊具完全脱离挂钩组件后,完成脱钩动作。
7、本发明的一个优选方案,其中,所述吊具包括吊具架、设置在所述吊具架下端的吊具连接件、设置在所述吊具连接件下端的吊环以及钢针;所述吊环以及钢针均可拆卸地安装在所述吊具连接件的下端;所述吊具架上设有供挂钩组件卡入的多个槽孔。采用上述结构,采摘时,工人将采收后的香蕉果串竖直放置于地上,在果轴处绑上麻绳,并将麻绳一端绑在吊环上,最后通过钢针将吊具插在果轴的顶部,实现吊具的安装。
8、优选地,所述挂钩组件包括爪钩、设置在所述吊运架上的限位块、设置在所述爪钩与所述限位块之间的导向杆以及套设在所述导向杆上的复位弹簧,其中,所述导向杆的一端与所述限位块滑动连接,所述导向杆的另一端与所述爪钩的上端连接,所述复位弹簧的一端作用于所述限位块,所述复位弹簧的另一端作用于所述爪钩。上述结构中,当爪钩在导向机构的作用下接近吊具,直到吊具位于多个爪钩的中间,在抓取驱动机构的驱动下,吊具与爪钩相互靠近运动,并在吊运装置自身的重力下,吊具将多个爪钩向外撑开,撑开时,在导向杆的引导下,爪钩克服复位弹簧的弹力与导向杆一起向外运动(即压缩复位弹簧),当吊具越过爪钩下端的吊钩时,被撑开的三个爪钩在复位弹簧的作用下向内运动复位;吊运装置在无人机的牵引下上升,上升的过程中,爪钩向上运动,其下端的吊钩会扣入槽孔中,完成挂钩,无人机通过吊运装置吊起香蕉果串进行运送。
9、优选地,所述抓取驱动机构包括设置在所述吊运架底部的电磁铁、设置在所述电磁铁下端的薄膜式压力传感器以及设置在吊具架上端的磁铁块。具体的工作原理为:当吊具架通过导向机构后与三个爪钩接触,此时,电磁铁通电,电磁铁与磁铁块相互吸引,在磁力与吊运装置自身的重力作用下撑开三个爪钩,并克服复位弹簧的弹力,吊具架会越过爪钩下端的吊钩,电磁铁与磁铁块吸合,薄膜式压力传感器发出电信号使电磁铁断电,完成对吊具的抓取,而被撑开的三个爪钩在复位弹簧的作用下复位;吊运装置在无人机的牵引下上升,上升的过程中,在拉力作用下电磁铁与磁铁块分离,爪钩也一同向上运动,其下端的吊钩会扣入槽孔中,完成挂钩,无人机通过吊运装置吊起香蕉果串进行运送。
10、优选地,所述自主脱钩机构包括设置在吊运架上的舵机、设置在所述吊运架上的齿条、设置在所述舵机的主轴上的齿轮以及设置在所述齿条下端用于推动爪钩的推动块;其中,所述齿轮与所述齿条啮合。上述结构的具体原理为:当香蕉果串运送到指定位置时,飞手发出脱钩指令,此时电磁铁通电,电磁铁与磁铁块重新吸合后,电磁铁底部的薄膜式压力传感器发出电信号,使电磁铁断电,舵机开始动作;首先舵机带动齿轮正转固定角度,齿条在齿轮的作用下竖直向下运动,同时带动推动块向下运动;推动块与三个爪钩的上端相接触,推动块在向下运动的过程中撑开三个爪钩,为吊具脱离自主抓取机构留出空间;飞手控制无人机牵引吊运装置上升,电磁铁与磁铁块在拉力的作用下分离,无人机继续上升直至吊具脱离自主抓取机构,完成脱钩动作。飞手发出指令控制舵机反转固定角度,齿条竖直向上运动,带动推动块同时向上运动,三个爪钩在复位弹簧的作用下复位,准备下一次的抓取与挂钩动作。
11、优选地,所述爪钩的上端设有倾斜导向面,所述推动块向下运动时,所述推动块与所述倾斜导向面配合。采用上述结构,当推动块向下运动时,通过与倾斜导向面接触,在倾斜导向面的作用下,爪钩会向外运动,保证了推动块竖向运动转变为爪钩的水平运动。
12、优选地,所述爪钩包括位于上端的安装块以及位于下端的吊钩;所述倾斜导向面设置在所述安装块上,所述复位弹簧作用在所述安装块上,所述导向杆连接在所述安装块上。其目的在于,使得爪钩的整体结构变得更加紧凑。
13、优选地,所述导向机构包括外导向套以及设置在所述外导向套内部的内导向套,所述外导向套与内导向套之间固定连接,所述外导向套的上端连接在所述吊运架的下端。上述结构中,内导向套与吊具架接触,将吊具引导至自主抓取机构,方便自主抓取机构对吊具进行抓取,外导向套起到固定内导向套的作用。
14、优选地,所述吊运架包括上底板、下底板以及设置在所述上底板与下底板之间的多根连接柱,所述连接柱的上端与所述上底板连接,所述连接柱的下端与所述下底板连接;所述自主抓取机构与导向机构设置在所述下底板上,所述自主脱钩机构设置在所述上底板上。通过设置上述结构,可减轻吊运架的重量,也能保证结构的稳定性,使得吊运架变得更加紧凑。
15、优选地,所述吊运架的上端设有齿条导向件,所述齿条竖向滑动设置在所述齿条导向件上。通过齿条导向件,便于齿条的安装,同时对齿条起到引导作用,保证齿条运动地更加稳定。
16、本发明与现有技术相比具有以下有益效果:
17、1、本发明中的无人机吊运装备,通过无人机进行吊运,对地形环境具有更好的适应性,更能适应复杂的山地环境,运送效率更高,且通过吊具固定在香蕉果串的果轴上,对果实损伤更小,更符合山地蕉园农户的运送需求。
18、2、本发明中的无人机吊运装备,实现了无人机香蕉吊运的自动化,减少了无人机吊运过程中人工的参与,有效降低了劳动强度与人工成本,减小了潜在的安全隐患。
19、3、本发明中的无人机吊运装备,采用吊挂的方式进行运送能有效减少果实因接触碰撞产生的机械损伤,且运送方式简单,成本投入更低,具有更高的经济效益。
20、4、本发明中的无人机吊运装备,通过设置吊具,与自主抓取机构、导向机构以及自主脱钩机构相互配合工作,能够适应不同品种或个体香蕉不同的果轴形态,完成吊运任务。
21、5、本发明中的无人机吊运装备,整体结构设计紧凑轻便,不占用无人机过多负载,在续航一定的情况下增加无人机的工作时间,有效提高运送的效率与安全性。
22、6、本发明中的无人机吊运装备,吊运装置通过缆绳与无人机相连,装卸简单,香蕉吊运任务结束后即可解开缆绳卸下吊运装置,不影响无人机的后续使用。
- 还没有人留言评论。精彩留言会获得点赞!