一种摇臂式起落架停机载荷的测算方法与流程
本发明涉及飞机起落架地面载荷计算领域,尤其涉及一种摇臂式起落架地面停机载荷的测算方法。
背景技术:
1、起落架停机载荷是指飞机在停机状态起落架所承受来自于地面的支承反力。一般飞机具有多个起落架,每个起落架的停机载荷和飞机重量、重心位置等参数相关,因此,能够获取每个起落架实测的停机载荷对获取实际的飞机重量、重心位置状态、每个起落架载荷分配等等具有重要的价值和意义。
2、起落架结构形式包括构架式起落架、支柱式起落架、摇臂式起落架和小车式起落架等,构架式由于不能收放因此逐渐被现代机型所淘汰,小车式主要用于大型运输类飞机,在大多数现代机型中通常采用支柱式或摇臂式的带油气式缓冲器的起落架。
3、支柱式起落架的载荷传递路线清晰且具有恒定的载荷传递系数,其停机载荷的计算简单,在各类文献和条款中均有明确规定。而摇臂式起落架停机载荷计算与支柱式起落架不同,载荷传递系数随着缓冲器压缩量的变化而改变,目前暂无相关规范或条款进行规定,尚无公开的专利或论文介绍相关的测算方法。
4、现有的起落架停机载荷常规的测量方法主要是通过顶升称重法或磅秤称重法,即通过千斤顶与载荷传感器结合或用牵引车将飞机牵引至地面磅秤上进行称重。这两种方法实现的条件均较为苛刻,一是需要较大的空旷场地(如机库或大型厂房内),二是需要特殊设备(如载荷传感器及数据采集处理系统或牵引车及飞机称重专用大型磅秤等),这也导致了常规测量方法的实现难度高、成本高、时间长等缺陷。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种摇臂式起落架地面停机载荷的测算方法,用以解决现有起落架停机载荷测量困难的问题。
2、一方面,本发明实施例提供了一种摇臂式起落架停机载荷的测算方法,所述方法包括:
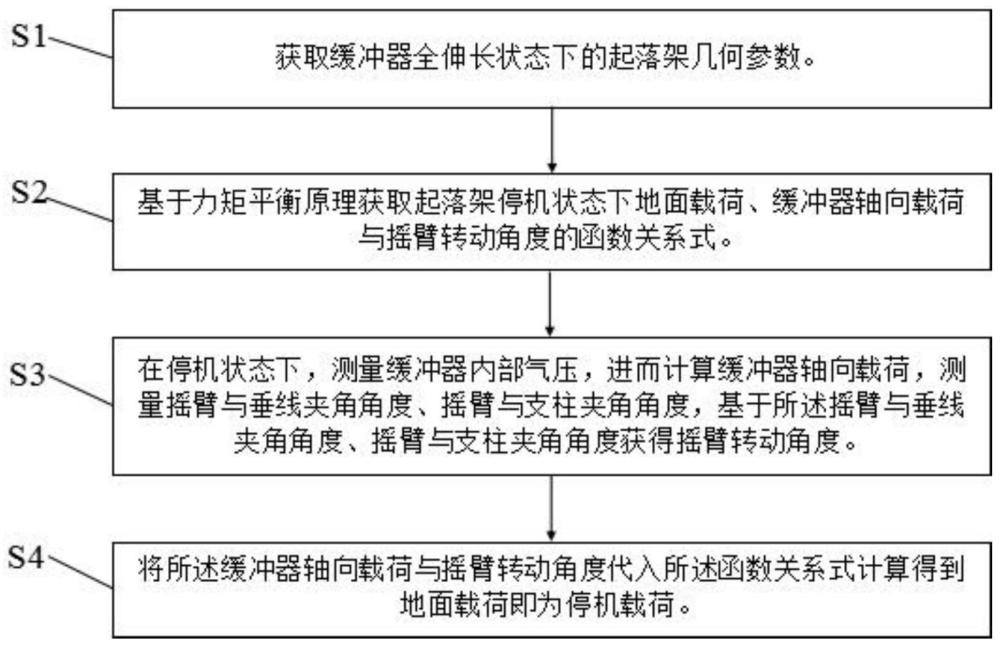
3、获取缓冲器全伸长状态下的起落架几何参数;
4、基于力矩平衡原理获取起落架停机状态下地面载荷、缓冲器轴向载荷与摇臂转动角度的函数关系式;
5、在停机状态下,测量缓冲器内部气压,进而计算缓冲器轴向载荷,测量摇臂与垂线夹角角度、摇臂与支柱夹角角度,基于所述摇臂与垂线夹角角度、摇臂与支柱夹角角度获得摇臂转动角度;
6、将所述缓冲器轴向载荷与摇臂转动角度代入所述函数关系式计算得到缓冲器轴向载荷即为停机载荷。
7、基于上述方法的进一步改进,所述缓冲器全伸长状态下的起落架几何参数,包括:
8、缓冲器与支柱铰接点距摇臂转动中心的长度,
9、缓冲器与摇臂铰接点距摇臂转动中心的长度,
10、摇臂长度,
11、缓冲器与支柱铰接点与摇臂转动中心的连线、缓冲器与摇臂铰接点与摇臂转动中心的连线的夹角角度。
12、基于上述方法的进一步改进,所述获得缓冲器全伸长状态下的起落架几何参数的方式,包括:使用量具测量,或读取预设参数。
13、基于上述方法的进一步改进,所述停机状态,指起落架摇臂绕支柱转动中心达到力矩平衡状态,表示为关系式:
14、fw·lw-fs·ls=o,式中,
15、fw为地面载荷,
16、lw为地面载荷力臂,
17、fs为缓冲器轴向载荷,
18、ls为缓冲器轴向载荷力臂。
19、基于上述方法的进一步改进,所述地面载荷力臂,表示为:
20、
21、o点为摇臂绕支柱转动中心,
22、c′为停机状态下的摇臂上的轮轴中心点,
23、oc′为摇臂长度,
24、为缓冲器全伸长状态下摇臂与垂线夹角,
25、为摇臂的转动角度。
26、基于上述方法的进一步改进,所述缓冲器轴向载荷力臂,表示为:
27、
28、a点为缓冲器与支柱铰接点,
29、b点为缓冲器与摇臂铰接点,
30、oa为缓冲器与支柱铰接点距摇臂转动中心长度,
31、ob为缓冲器与摇臂的铰接点距摇臂转动中心长度。
32、基于上述方法的进一步改进,所述地面载荷、缓冲器轴向载荷与摇臂的转动角度的函数关系式,表示为:
33、
34、基于上述方法的进一步改进,所述计算缓冲器轴向载荷,表示为算式:
35、fs=p×a,式中,
36、p为缓冲器内部气压,通过压力传感器测量获得,
37、a为缓冲器压气面积。
38、基于上述方法的进一步改进,所述摇臂与垂线夹角角度、摇臂与支柱夹角角度,通过角位移传感器测量得出。
39、基于上述方法的进一步改进,所述基于所述摇臂与垂线夹角角度、摇臂与支柱夹角角度获得摇臂转动角度具体为:
40、将摇臂与支柱夹角角度与所述缓冲器全伸长状态下的摇臂与垂线夹角角度相减获得摇臂转动角度。
41、与现有技术相比,本发明至少可实现如下有益效果:
42、本发明不受场地因素制约,无需复杂工装、设备,无需对飞机进行顶起或牵引等操作,而是直接利用装备于起落架上的感知测量装置对起落架的内部气压、支柱摇臂夹角等参数进行测量,再通过简单的换算关系进行参数转换,可以快速得到不同飞机重量、重心下的起落架停机载荷,计算过程简单可靠,计算结果详尽精确,能真实地反映起落架的实际停机载荷。
43、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
技术特征:
1.一种摇臂式起落架停机载荷的测算方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述缓冲器全伸长状态下的起落架几何参数,包括:
3.根据权利要求2所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述获得缓冲器全伸长状态下的起落架几何参数的方式,包括使用量具测量,或读取预设参数。
4.根据权利要求3所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述停机状态,指所述起落架摇臂绕支柱转动中心达到力矩平衡状态,表示为关系式:
5.根据权利要求4所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述地面载荷力臂,表示为:
6.根据权利要求5所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述缓冲器轴向载荷力臂,表示为:
7.根据权利要求6所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述地面载荷、所述缓冲器轴向载荷与所述摇臂的转动角度的函数关系式,表示为:
8.根据权利要求7所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述计算缓冲器轴向载荷,表示为算式:
9.根据权利要求8所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述摇臂与垂线夹角角度、摇臂与支柱夹角角度,通过角位移传感器测量得出。
10.根据权利要求9所述的一种摇臂式起落架停机载荷的测算方法,其特征在于,所述基于所述摇臂与垂线夹角角度、摇臂与支柱夹角角度获得摇臂转动角度具体为:
技术总结
本发明涉及一种摇臂式起落架停机载荷的测算方法,属于飞机起落架地面载荷计算领域,通过推导地面载荷、缓冲器轴向载荷与摇臂转动角度的函数关系式,基于测量起落架缓冲器内部气压、摇臂与支柱夹角、缓冲器全伸长状态下起落架几何参数在内的少数参数,通过快速换算,即可得到不同飞机重量、重心下的起落架停机载荷,解决了现有技术中测量停机载荷难度高、成本高、时间长的问题。
技术研发人员:吴晓宇
受保护的技术使用者:西安联飞智能装备研究院有限责任公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!