基于无人机吊装的光伏清洁机器人吊装装置及方法与流程
本发明属于新能源行业运维,特别涉及一种光伏板清洁过程中,清洁机器人的对接、转运、补能技术。
背景技术:
1、目前光伏清洁机器人通常采用两种模式工作:
2、模式一为固定式清洁机器人,即每块光伏板上安装简易的清洁机器人,定期清扫,确保光伏板发电效率。但是这种模式下,面临三大问题:其一,所有光伏板安装清洁机器人,成本高,施工难度大,性价比很低;其二,固定的模式下,清洁机器人利用率非常低,在大多数场景下,每周清洁就能满足发电量恢复的要求,这样清洁机器人效率只有百分之十几;其三,机器人运维效率低,在实际使用中需要定期到现场进行检查和维修,一旦出现设备异常,很难及时发现并且需要到现场处理;
3、模式二采用运维人员与清洁机器人协同工作,在机器人工作时,通过人工把机器人在不同光伏板之间进行搬运。这种模式存在的普遍问题包括:其一,必须有现场运维人员搬运;但是,光伏电站区域通常道路、场地、高度等都不适合人员操作;其二,清洁机器人由于清扫效率和清扫机构的设定目标,清洁机器人的重量通常在25kg左右,因此,搬运及其不方便,影响效率发挥;其三,受到人员作业环境影响,该模式在应用上受到很大限制,例如:夜间作业、雨天作业、水上作业等。
4、近些年,随着无人机技术的发展,现有技术中有在无人机上搭载清理装置,利用无人机的灵活性实现光伏组件的清洁。例如,中国实用新型专利cn201620207049.9公开了一种光伏板监测清理空中机器人系统,包括四旋翼无人机、清理装置、监视装置、无线收发器、gps定位装置、主控制器和遥控器;其中监视装置由摄像机、云台和云台控制器组成,清理装置由机器人手臂和电动喷嘴组成,尾部集成有锂电池、无线收发器、机载天线及gps定位装置;锂电池和无线收发器分别与主控制器连接;遥控器上分别设飞行遥控手柄、清扫遥控手柄及lcd显示屏。该实用新型将无人机机载无线遥测技术与清理机器人手臂相结合,通过遥控装置对光伏电池板的清洁状态进行监测,再通过机载清理机器人对需要清理的光伏电池板进行重点清理。但是,该专利中,由于无人机与清理装置无法分离,在清理装置清理的过程中,无人机无法执行其他任务,无人机的利用率较低。
5、现有技术中也有基于无人机吊装的光伏清洁机器人。例如,中国实用新型专利cn201821607263.9公开了一种用于投放微型光伏清洁机器人的无人机抓取装置。无人机底部固定有电磁吸盘,光伏板清洁机器人的上部安装有具有磁性的上部外壳,无人机通过电磁吸盘与光伏板清洁机器人的外部外壳相互吸附,从而实现对光伏板清洁机器人的抓取。采用这种方式进行无人机吊装也存在一些问题,例如,由于清洁机器人的重量较重,因此,相应的磁铁必须与之相适应,可能由于磁铁重量过重而增加能耗;并且,如果发生意外断电的情况,电磁铁失去磁力,可能会存在安全风险。
6、中国发明专利申请cn202210411513.6公开了一种与无人机相结合的光伏清洁方法,包括安装在无人机底部的可控挂钩及安装在光伏清洁机器人顶端的挂环,可控挂钩与挂环均为多组并一一对应,实现利用无人机对清洁机器人的投放与回收。该专利申请中的连接方式需要无人机与光伏清洁机器人较为精确地对准,并且,由于挂钩开口有方向性,挂钩与挂环连接时可能存在一定困难,并且,无人机难以判断挂钩与挂环是否构成了有效连接。
7、中国发明专利申请cn 202310520412.7公开了一种光伏清洁机器人,无人机装置包括抓取机构,抓取机构抓取控制箱,进而将光伏清洁机器人的底盘运送至指定区域;抓取机构包括连接板和铰接组件,铰接组件包括两个铰接臂,两个铰接臂的中部通过铰接轴转动连接;连接板可拆卸地设置在无人机装置上,每个铰接臂的一端设置在连接板上;铰接臂远离连接板的一端能够与底盘的控制箱相互卡接配合。该专利申请公开的连接方式,在抓取机构与控制箱配合的时候,无人机需要克服横向力,容易发生侧移。
技术实现思路
1、为克服现有技术中存在的上述问题,本发明的目的在于提供一种清洁机器人、无人机、无人机机库的协同作业关键装置及方法,以解决无人机与清洁机器人自动对接、吊装、转运的技术问题。
2、本发明提供一种基于无人机吊装的光伏清洁机器人吊装装置,包括设置在无人机上的起吊机构,以及设置在清洁机器人上的起吊对接机构;
3、其中,所述起吊机构包括对接自锁机构,所述起吊对接机构包括设置在所述清洁机器人上方的对中机构,以及对接自锁环;
4、所述对接自锁机构能够被所述对中机构引导,从中心穿过所述对接自锁环,并能够在自锁状态时卡住所述对接自锁环,与所述对接自锁环自锁,满足所述清洁机器人的起吊要求。
5、所述对接自锁机构包括分瓣式构造的张开机构;所述张开机构的各分瓣张开时,各分瓣卡在所述对接自锁环上,实现所述对接自锁机构与所述对接自锁环的自锁;所述张开机构的各分瓣闭合时,所述张开机构可以从所述对接自锁环中心脱离,实现所述对接自锁机构与所述对接自锁环的分离,机械式锁紧确保系统在失电时也能安全锁住,吊装可靠。
6、所述对接自锁机构还包括控制机构、驱动机构;所述控制机构用于接收控制信号,并控制所述驱动机构工作;所述驱动机构驱动所述对接自锁机构,以使所述对接自锁机构与所述对接自锁环自锁,或使所述对接自锁机构与所述对接自锁环分离。
7、所述起吊机构还包括起吊卷扬机及起吊钢索,所述起吊卷扬机通过所述起吊钢索连接所述对接自锁机构。
8、所述起吊卷扬机采用机电一体化设计,除完成收放所述起吊钢索的工作外,能够通过所述起吊钢索中集成的控制信号传输线传递电信号,参与系统控制;采用滑环技术把电信号从控制系统上通过所述起吊钢索传递到电气执行元件及传感器。
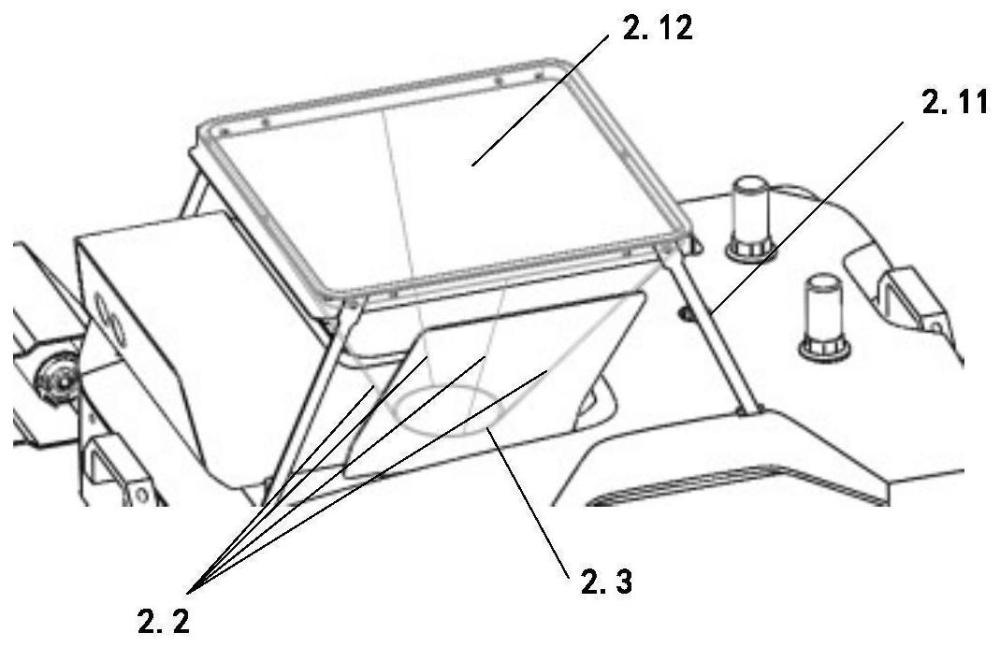
9、所述对中机构包括引导装置;
10、所述引导装置用于在所述对接自锁机构从所述清洁机器人上方落下时,引导所述对接自锁机构落入所述对中机构的下部。
11、所述引导装置包括围合的侧壁,其上方开口面积大、下方开口面积小,整体呈倒锥形。
12、所述起吊对接机构包括多个平衡牵引部件,所述平衡牵引部件的一端与所述对中机构连接,另一端与所述对接自锁环连接;并且,多个所述平衡牵引部件合理布置,以保证在起吊状态时所述清洁机器人组件保持平衡。
13、所述起吊对接机构还包括传感器,用于感知所述对接自锁机构,并向所述起吊机构发出信号,以使所述对接自锁机构与所述对接自锁环自锁;所述传感器为接触传感器,确保所述起吊对接机构到达清洁机器人内,避免误动作。
14、本发明提供一种基于无人机吊装的光伏清洁机器人吊装方法,包括如下步骤:
15、无人机收到需起吊指定清洁机器人的指令后,飞行到所述清洁机器人的上方适当位置,并使得无人机上设置的对接自锁机构与所述清洁机器人上设置的对中机构大致对准;
16、无人机快速释放所述对接自锁机构,所述对接自锁机构落入位于所述对中机构中的对接自锁环内;
17、无人机控制所述对接自锁机构打开,卡在所述对接自锁环上,实现自锁;
18、无人机起吊所述清洁机器人离开并到达其他光伏面板,并使清洁机器人逐步落到所述其他光伏面板上;
19、无人机控制所述对接自锁机构与所述对接自锁环分离,收起所述对接自锁机构。
20、本发明所述的吊装装置及方法可以实现无人机与清洁机器人在定位精度范围内自动对接,降低对接精度控制要求。通过自动识别对接机构姿态,自动锁紧确保无动力条件下安全可靠对接。此外,清洁机器人水平转运,满足清洁机器人的姿态稳定要求。
- 还没有人留言评论。精彩留言会获得点赞!